
一种轮毂搬运手爪及轮毂搬运装置.pdf

星菱****23


1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂搬运手爪及轮毂搬运装置.pdf
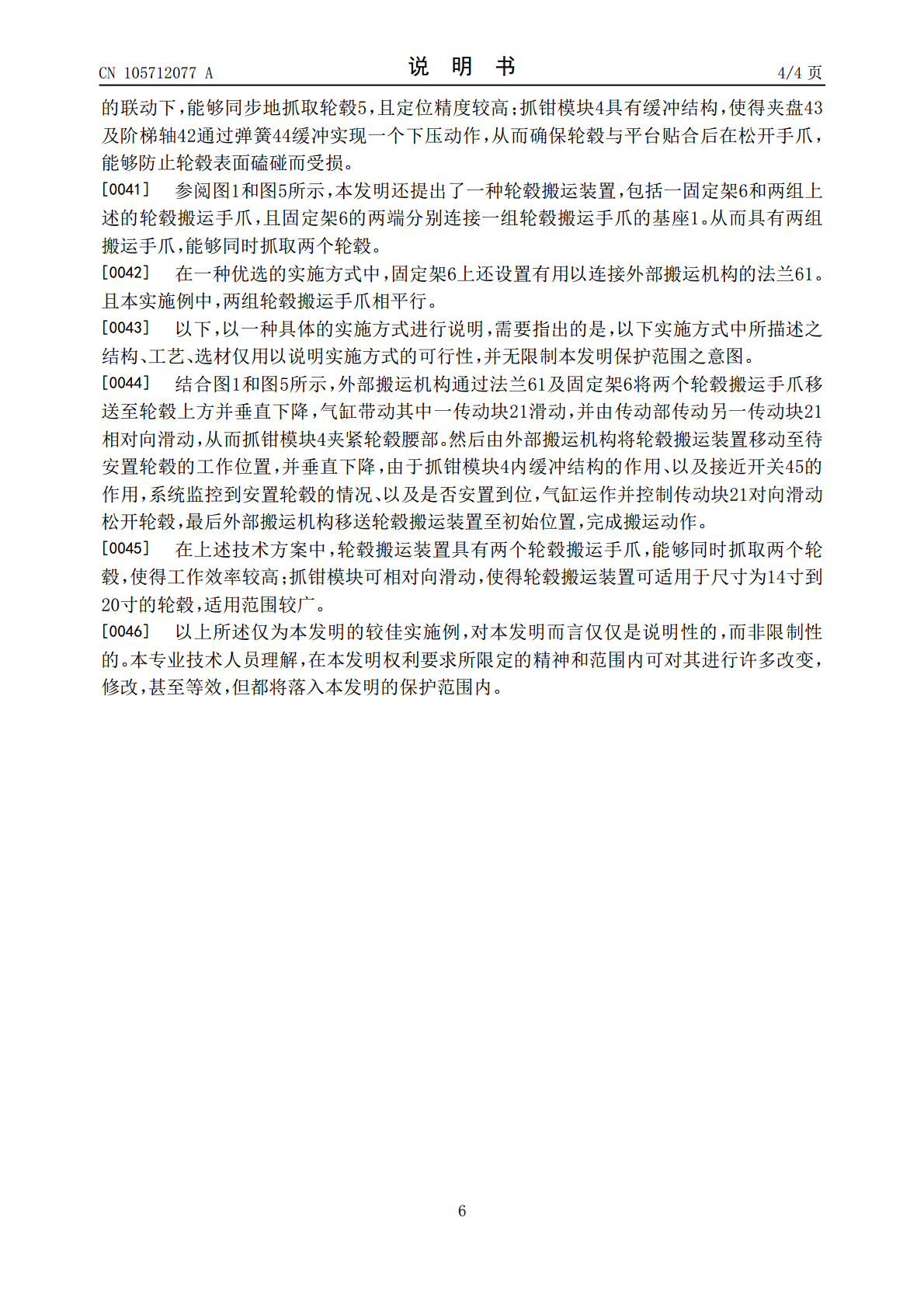
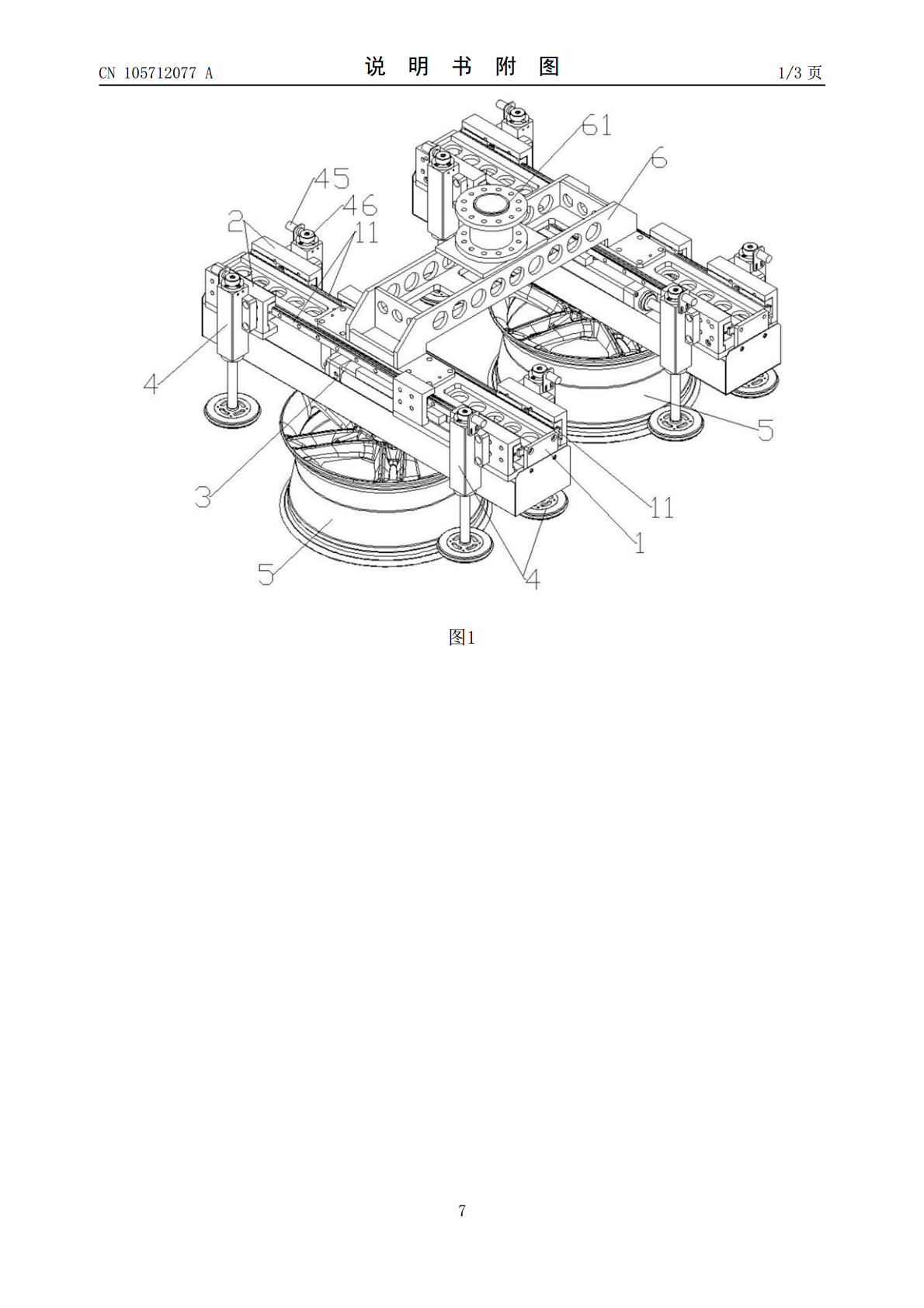
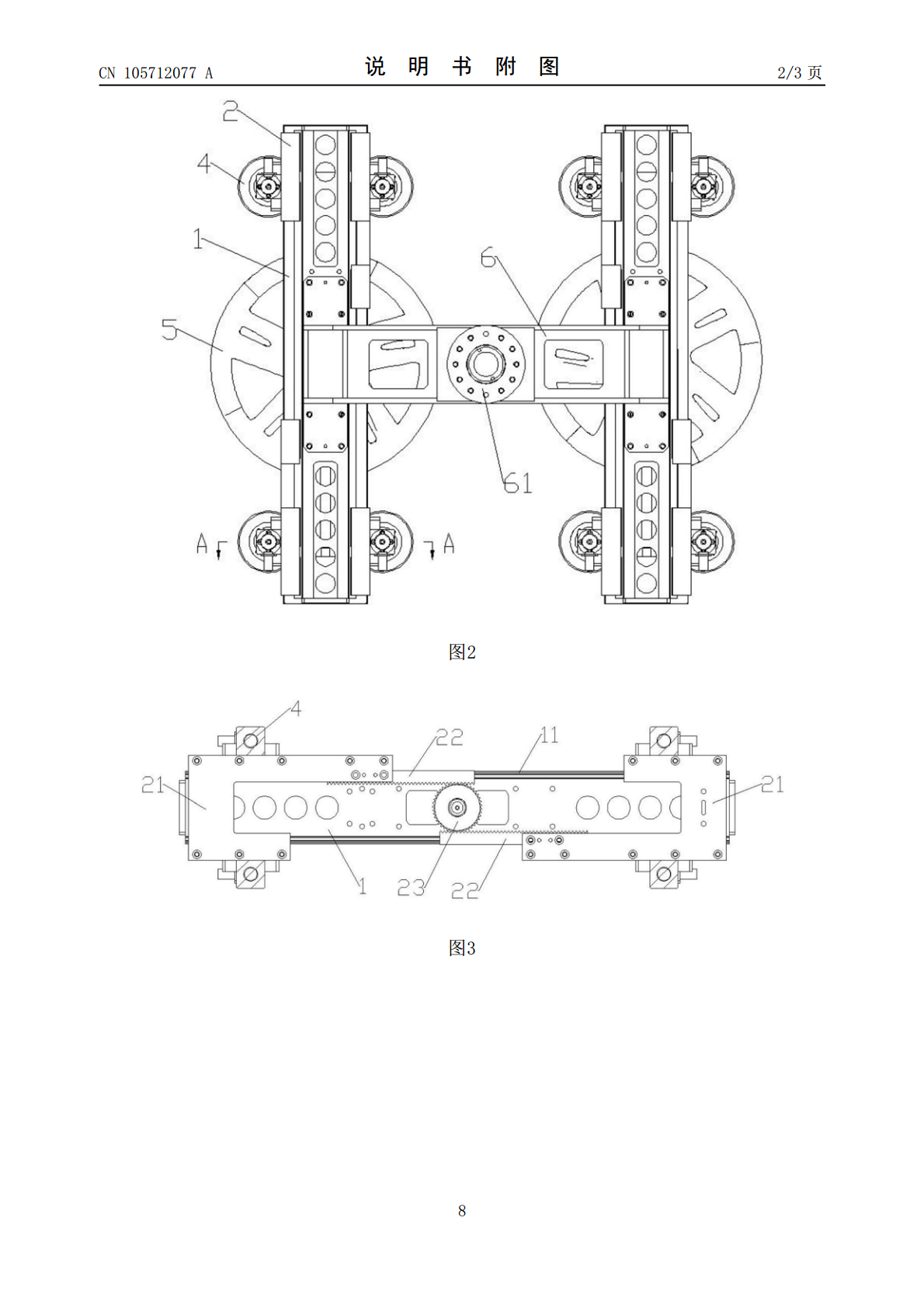
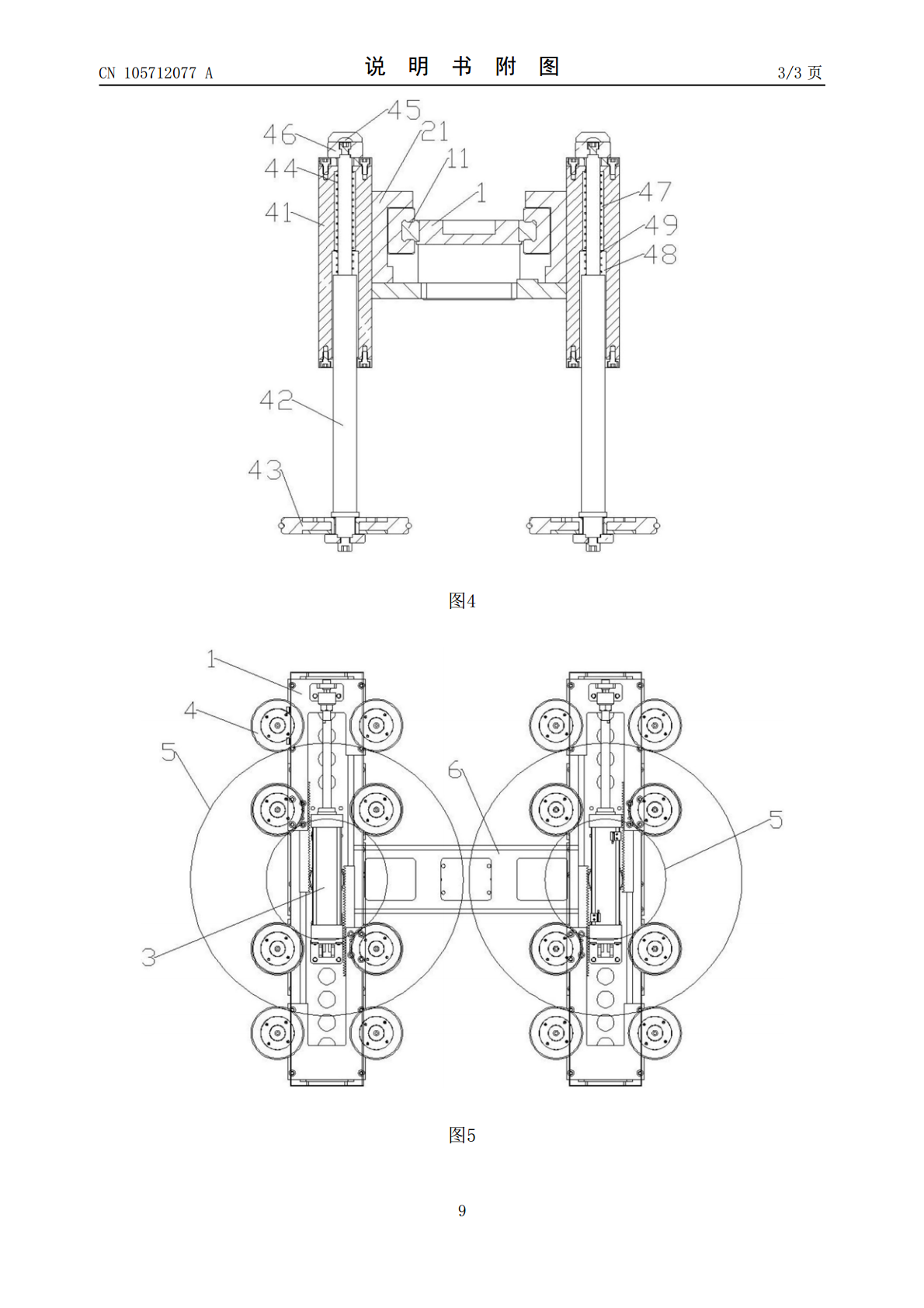
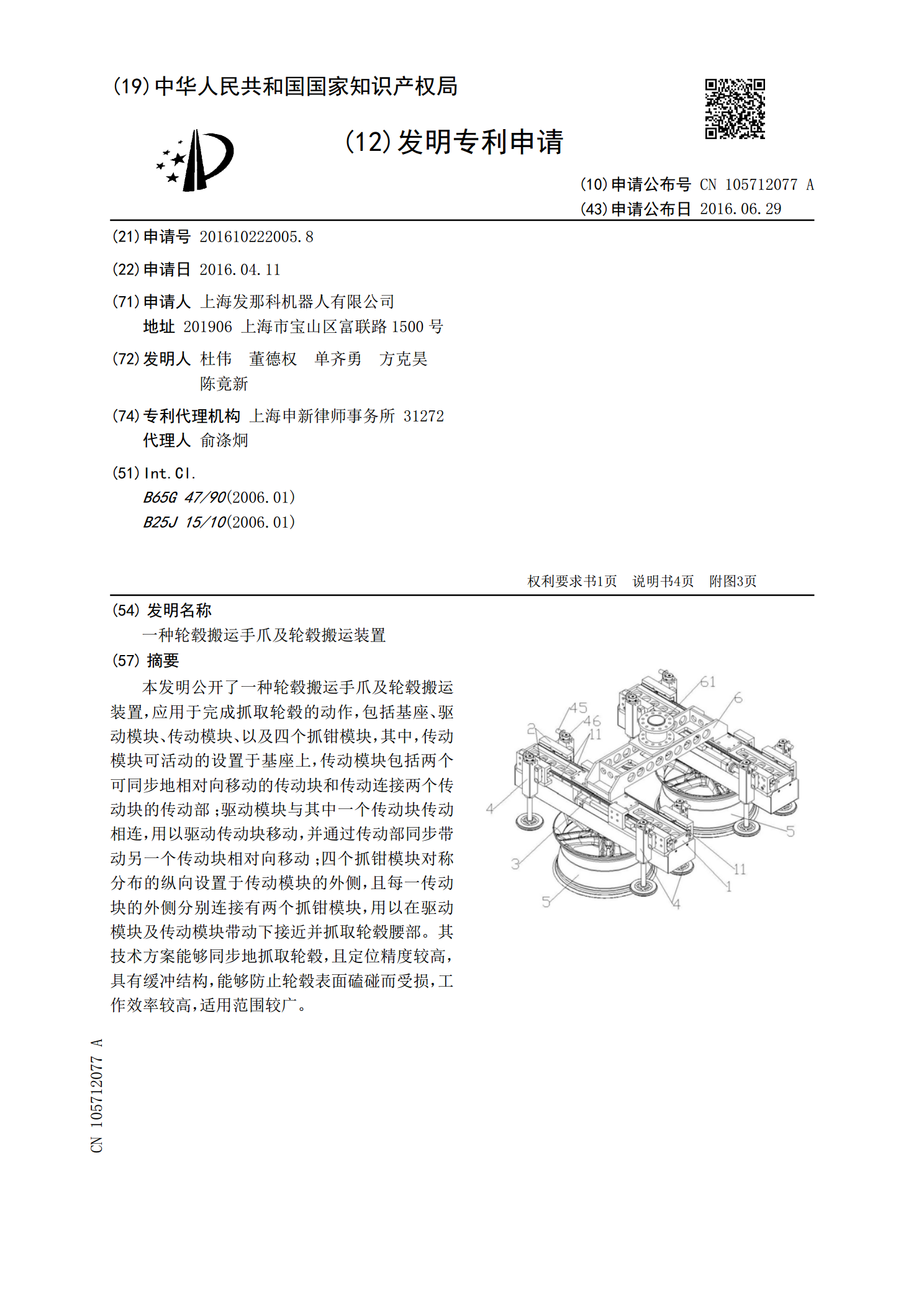
本发明公开了一种轮毂搬运手爪及轮毂搬运装置,应用于完成抓取轮毂的动作,包括基座、驱动模块、传动模块、以及四个抓钳模块,其中,传动模块可活动的设置于基座上,传动模块包括两个可同步地相对向移动的传动块和传动连接两个传动块的传动部;驱动模块与其中一个传动块传动相连,用以驱动传动块移动,并通过传动部同步带动另一个传动块相对向移动;四个抓钳模块对称分布的纵向设置于传动模块的外侧,且每一传动块的外侧分别连接有两个抓钳模块,用以在驱动模块及传动模块带动下接近并抓取轮毂腰部。其技术方案能够同步地抓取轮毂,且定位精度较高,
一种轮毂搬运装置.pdf
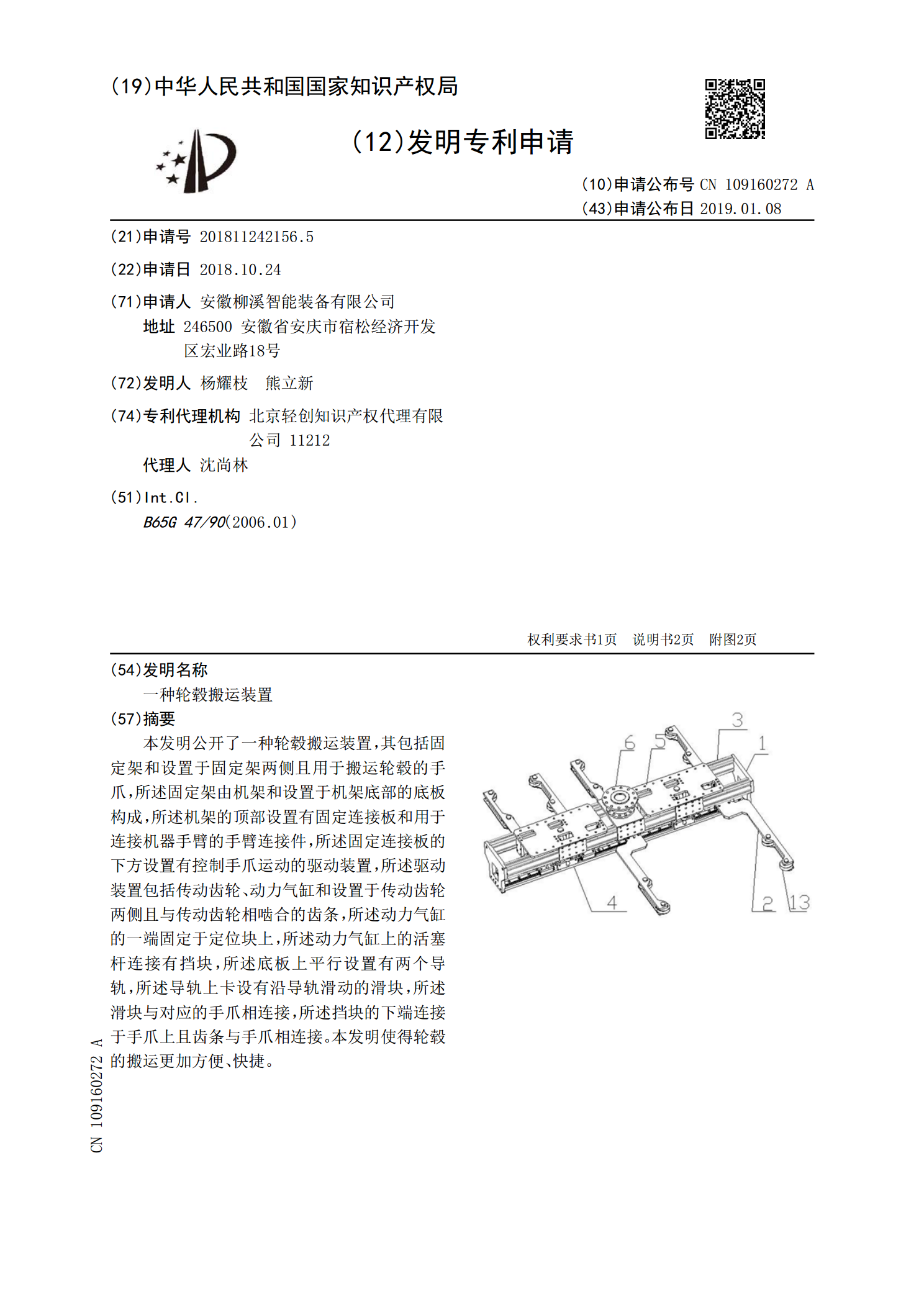
本发明公开了一种轮毂搬运装置,其包括固定架和设置于固定架两侧且用于搬运轮毂的手爪,所述固定架由机架和设置于机架底部的底板构成,所述机架的顶部设置有固定连接板和用于连接机器手臂的手臂连接件,所述固定连接板的下方设置有控制手爪运动的驱动装置,所述驱动装置包括传动齿轮、动力气缸和设置于传动齿轮两侧且与传动齿轮相啮合的齿条,所述动力气缸的一端固定于定位块上,所述动力气缸上的活塞杆连接有挡块,所述底板上平行设置有两个导轨,所述导轨上卡设有沿导轨滑动的滑块,所述滑块与对应的手爪相连接,所述挡块的下端连接于手爪上且齿条
一种基于轮毂电机驱动的搬运装置及搬运系统、搬运方法.pdf
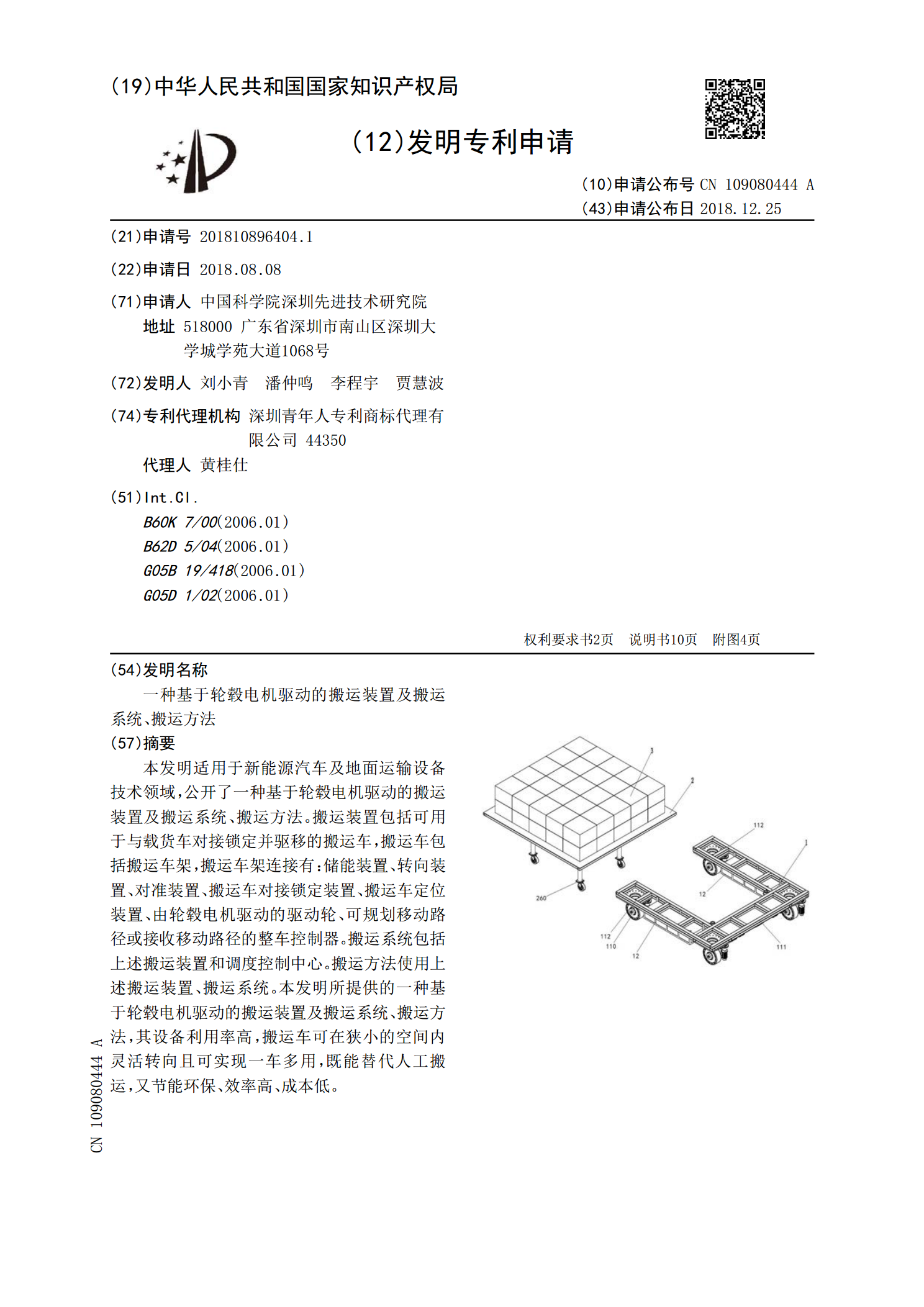
本发明适用于新能源汽车及地面运输设备技术领域,公开了一种基于轮毂电机驱动的搬运装置及搬运系统、搬运方法。搬运装置包括可用于与载货车对接锁定并驱移的搬运车,搬运车包括搬运车架,搬运车架连接有:储能装置、转向装置、对准装置、搬运车对接锁定装置、搬运车定位装置、由轮毂电机驱动的驱动轮、可规划移动路径或接收移动路径的整车控制器。搬运系统包括上述搬运装置和调度控制中心。搬运方法使用上述搬运装置、搬运系统。本发明所提供的一种基于轮毂电机驱动的搬运装置及搬运系统、搬运方法,其设备利用率高,搬运车可在狭小的空间内灵活转向
一种多功能轮毂搬运装置.pdf
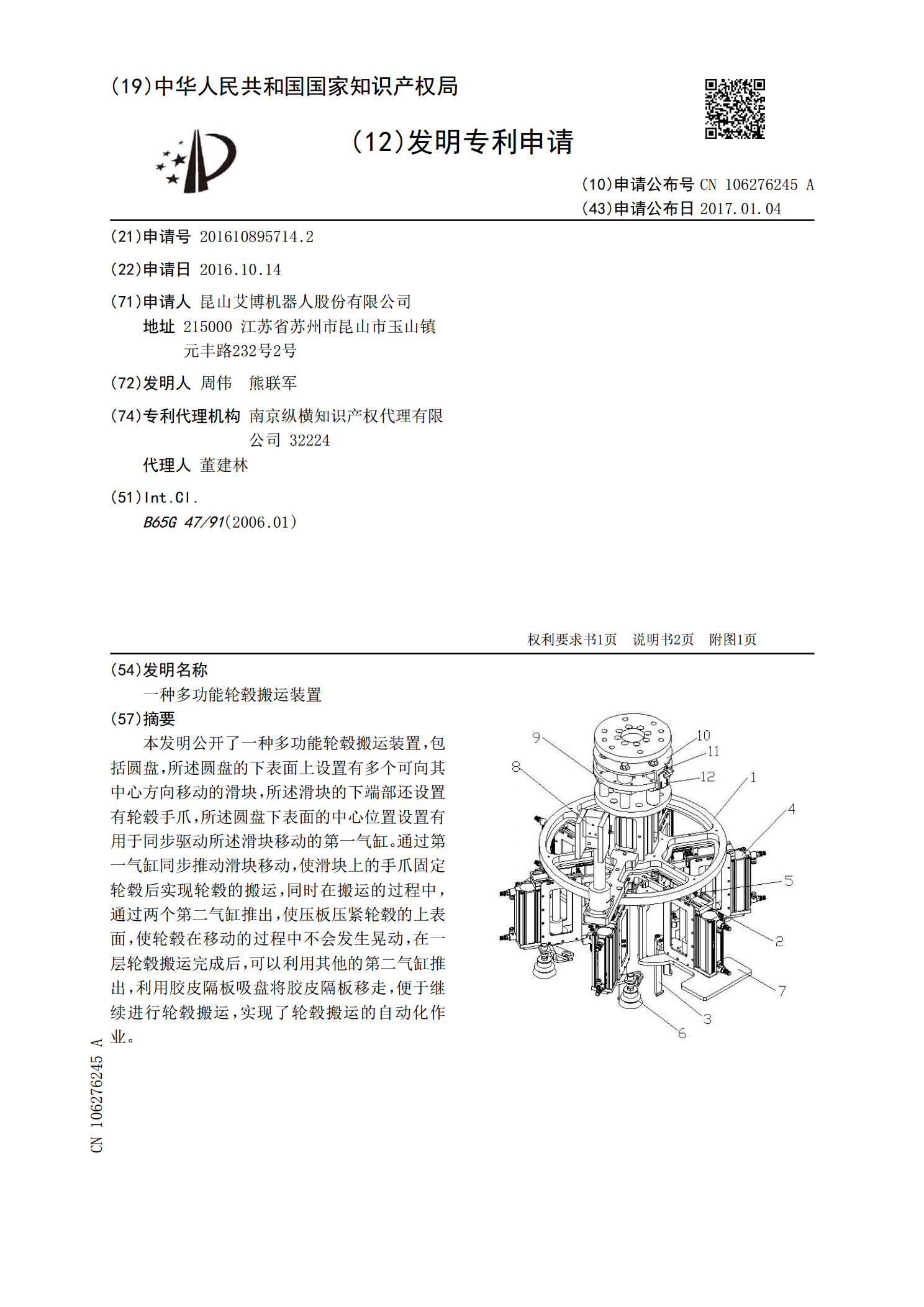
本发明公开了一种多功能轮毂搬运装置,包括圆盘,所述圆盘的下表面上设置有多个可向其中心方向移动的滑块,所述滑块的下端部还设置有轮毂手爪,所述圆盘下表面的中心位置设置有用于同步驱动所述滑块移动的第一气缸。通过第一气缸同步推动滑块移动,使滑块上的手爪固定轮毂后实现轮毂的搬运,同时在搬运的过程中,通过两个第二气缸推出,使压板压紧轮毂的上表面,使轮毂在移动的过程中不会发生晃动,在一层轮毂搬运完成后,可以利用其他的第二气缸推出,利用胶皮隔板吸盘将胶皮隔板移走,便于继续进行轮毂搬运,实现了轮毂搬运的自动化作业。
一种汽车轮毂的搬运装置.pdf
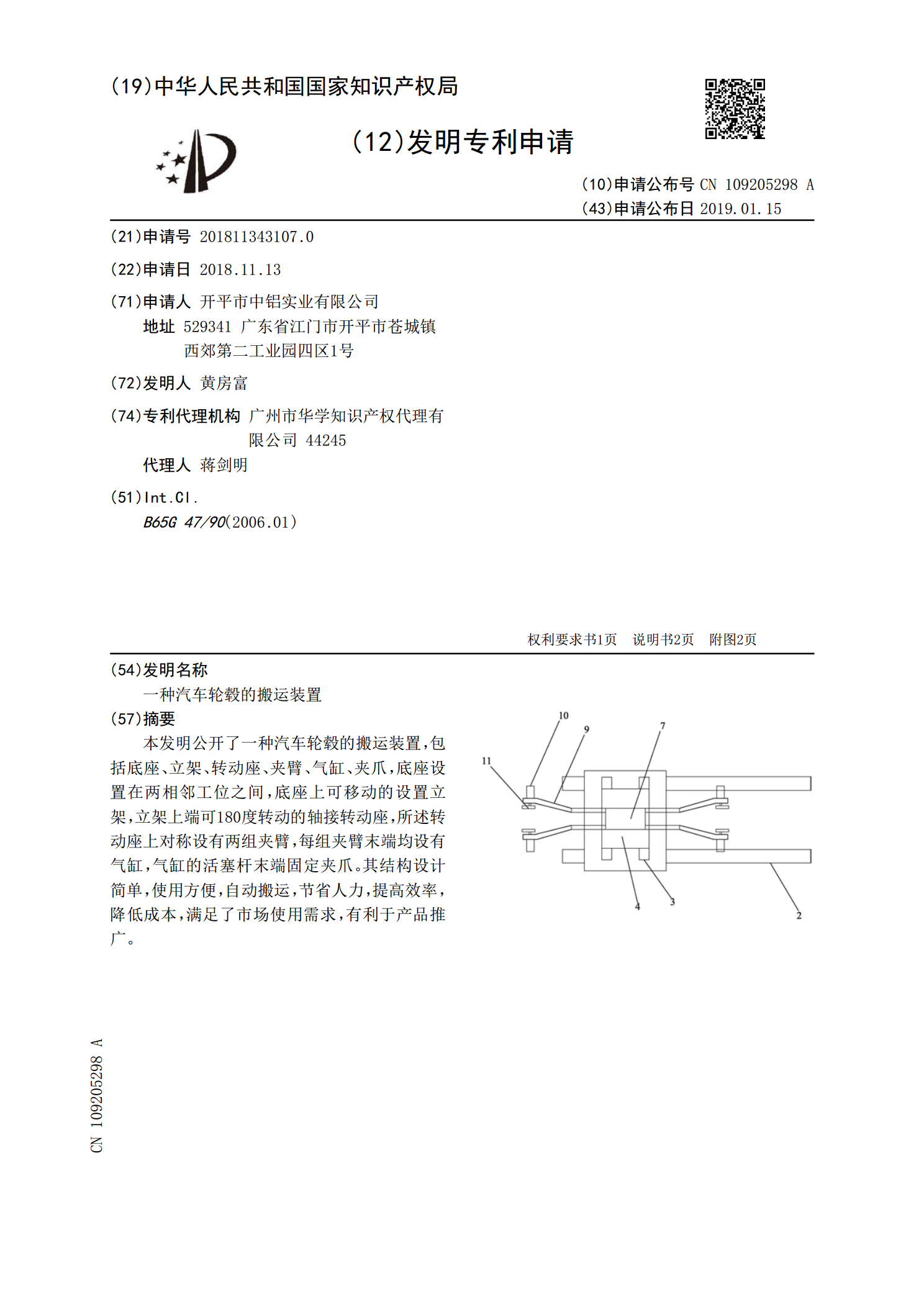
本发明公开了一种汽车轮毂的搬运装置,包括底座、立架、转动座、夹臂、气缸、夹爪,底座设置在两相邻工位之间,底座上可移动的设置立架,立架上端可180度转动的轴接转动座,所述转动座上对称设有两组夹臂,每组夹臂末端均设有气缸,气缸的活塞杆末端固定夹爪。其结构设计简单,使用方便,自动搬运,节省人力,提高效率,降低成本,满足了市场使用需求,有利于产品推广。