
一种柴油机瞬时转速测量及气缸熄火故障诊断装置和方法.pdf

子安****吖吖

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种柴油机瞬时转速测量及气缸熄火故障诊断装置和方法.pdf
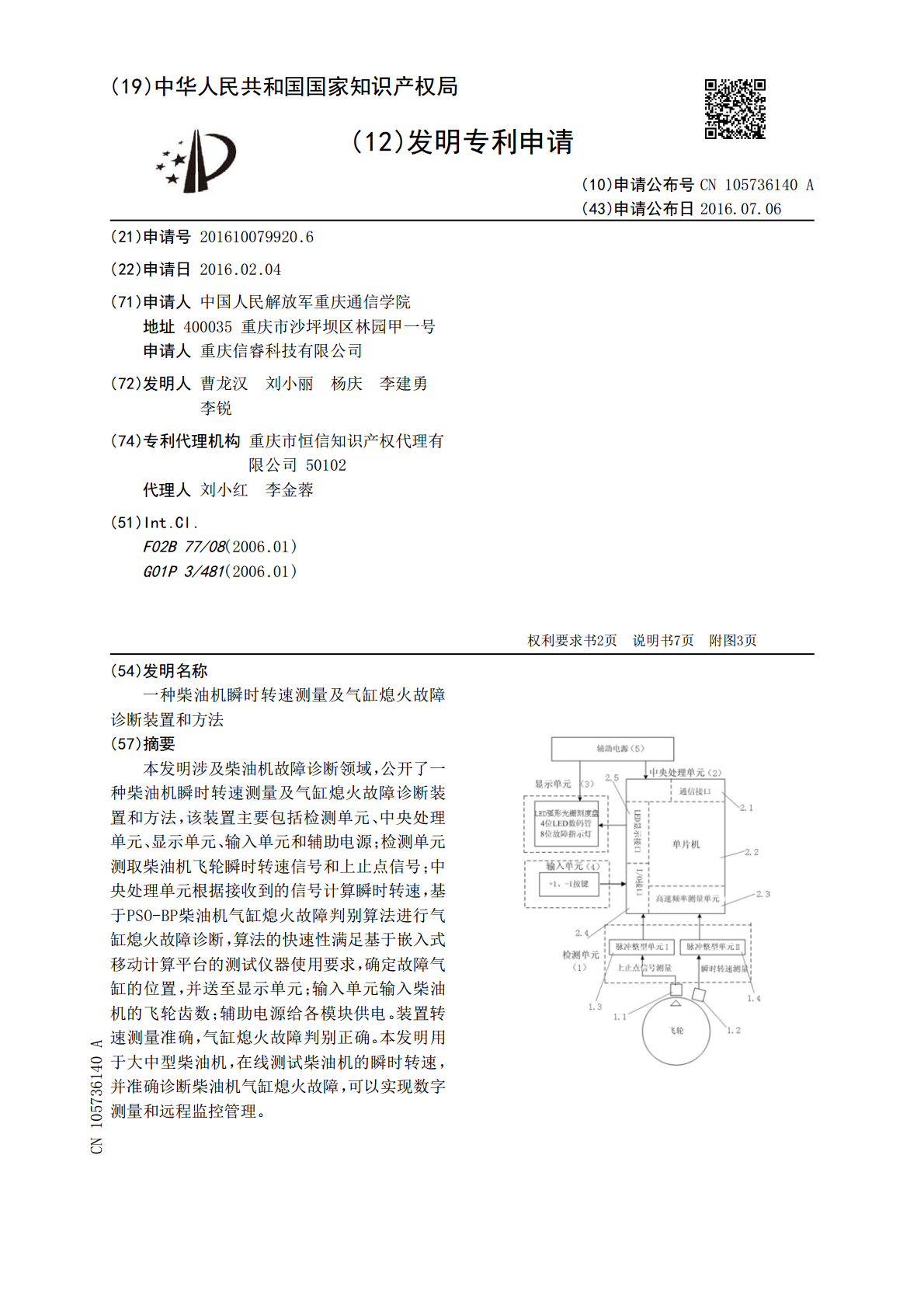
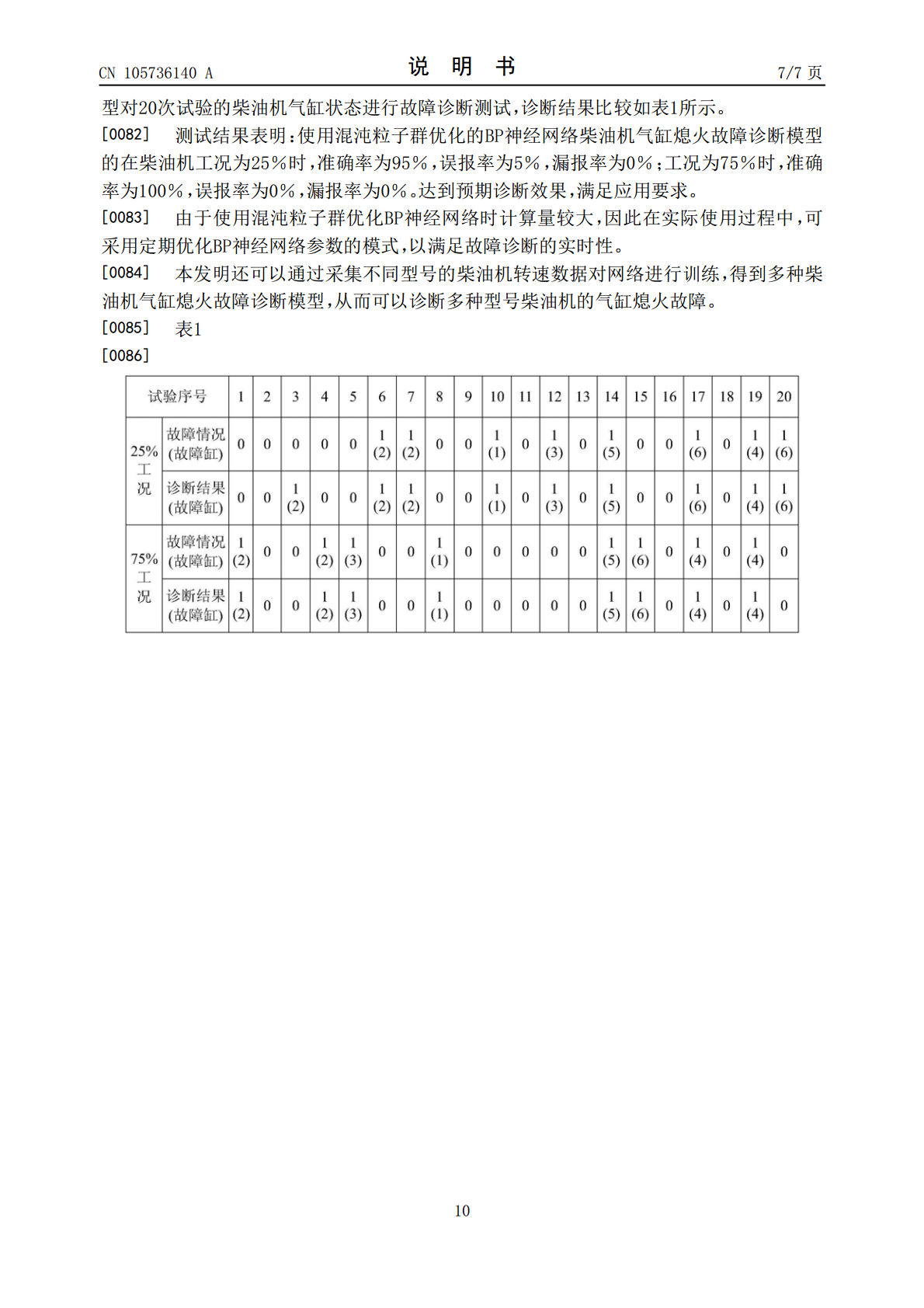
本发明涉及柴油机故障诊断领域,公开了一种柴油机瞬时转速测量及气缸熄火故障诊断装置和方法,该装置主要包括检测单元、中央处理单元、显示单元、输入单元和辅助电源;检测单元测取柴油机飞轮瞬时转速信号和上止点信号;中央处理单元根据接收到的信号计算瞬时转速,基于PSO?BP柴油机气缸熄火故障判别算法进行气缸熄火故障诊断,算法的快速性满足基于嵌入式移动计算平台的测试仪器使用要求,确定故障气缸的位置,并送至显示单元;输入单元输入柴油机的飞轮齿数;辅助电源给各模块供电。装置转速测量准确,气缸熄火故障判别正确。本发明用于大中

基于瞬时转速和振动信号的柴油机故障诊断研究的任务书.docx
基于瞬时转速和振动信号的柴油机故障诊断研究的任务书一、研究背景柴油机是现代机械化生产中使用广泛的重要动力设备之一,其稳定运作对于生产效率和安全保障至关重要。然而,柴油机在使用过程中不可避免地会出现故障,如白烟过多、发动机闯火等,这些故障会给机器工作效率、稳定性和使用寿命带来极大的影响。因此,如何快速、准确地诊断柴油机故障,对于确保生产线的正常运作具有重要的意义。目前,对于柴油机故障诊断的研究在不断地深入和扩展,瞬时转速和振动信号是其中研究的重点。瞬时转速可以显示出柴油机各个部位的旋转状况,而振动信号则可以

一种带有转速测量装置的柴油机飞轮.pdf
本发明公开了一种带有转速测量装置的柴油机飞轮,包括主轴,所述主轴的外表壁设有飞轮,所述飞轮与所述主轴固定连接,所述飞轮的外表壁设有飞轮齿带,所述飞轮齿带与所述飞轮固定连接,所述主轴的顶端设有拉扣,所述拉扣与所述主轴滑动连接;在飞轮的一端粘贴设置有反光贴,反光贴的高度和转速测量仪的测量灯高度一致,当飞轮转动时,转速测量仪会因为反光贴每旋转一次会记数一圈,转速测量仪会将飞轮旋转次数通过转速测量仪的屏幕对工作人员进行显示,避免了原有的柴油机飞轮在工作的过程中,一般没有转速测量装置,没办法知道飞轮的转速,导致无法
一种转速测量装置及方法.pdf
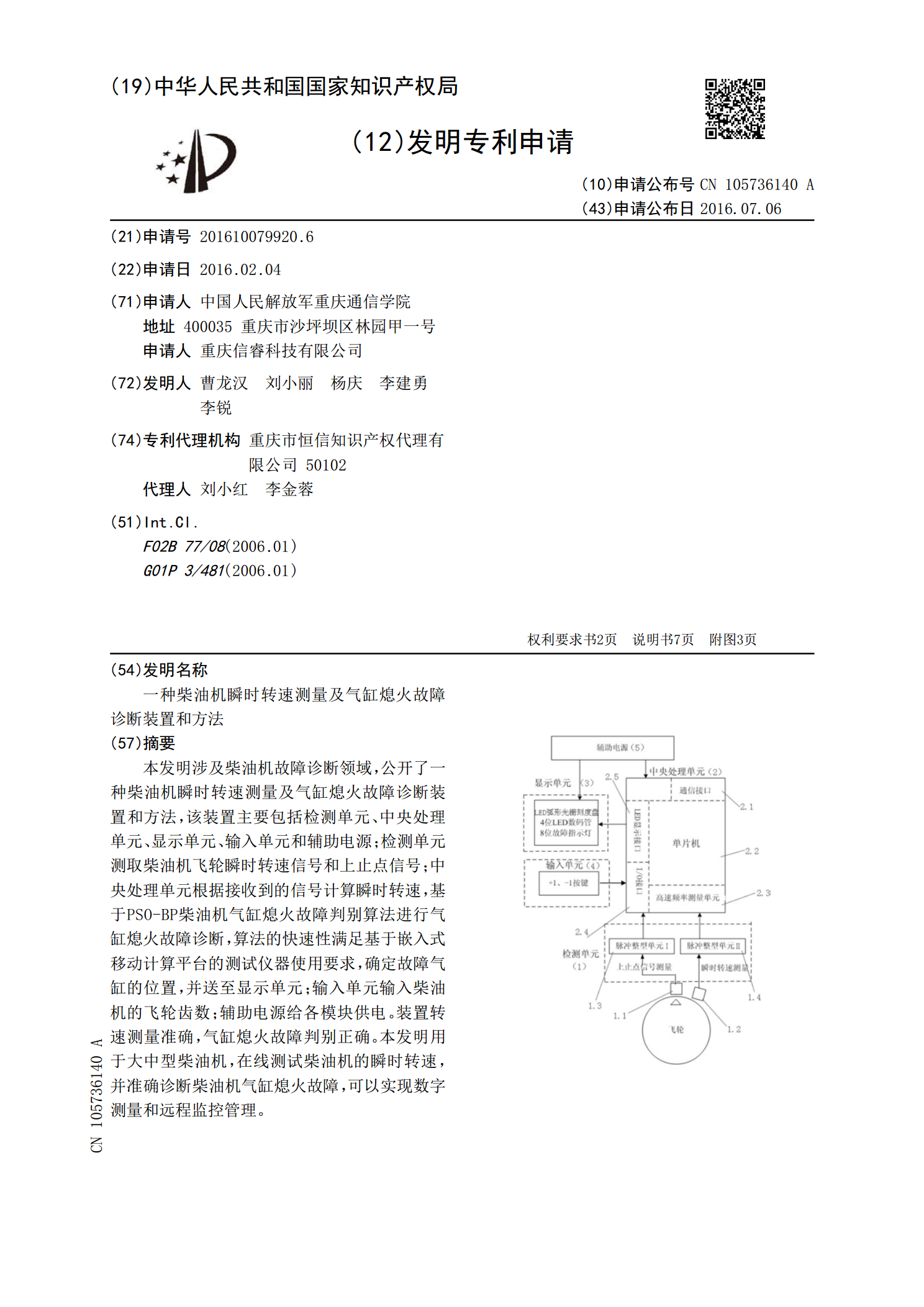
本发明公开了一种转速测量装置,包括磁体、减震装置和主体,磁体与减震装置相连接,减震装置与主体相连接,主体包括腔体和替换装置,腔体分为水平部分和垂直部分,水平部分内部用于放置两个重球,两个重球对称安装,重球与绳子的一端连接,绳子的另一端穿过滑轮与垂直部分内部的导向活塞的一面连接,导向活塞的另一面与所述替换装置相连接,导向活塞在上部周边涂一圈有色指示线,替换装置包括弹簧、拉力感应器、报警装置,在主体腔体的垂直部分外面套有一个固定筒,当腔体旋转时,固定桶是保持静止的,固定筒的上端固定有一个止动扳手,固定筒的一侧
一种电子式船用柴油机气缸直径测量装置及测量方法.pdf
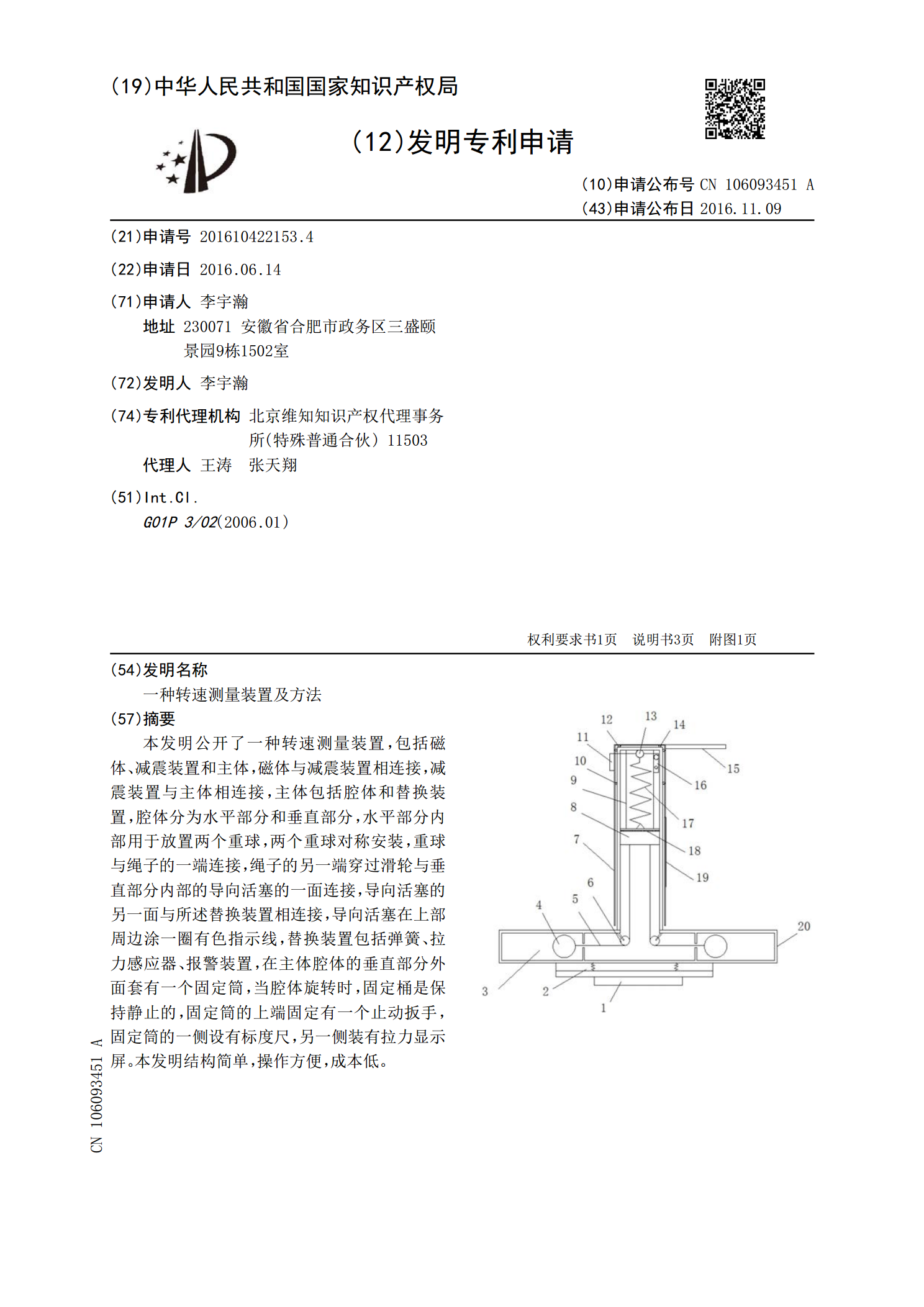
本发明公开了一种电子式船用柴油机气缸直径测量装置及测量方法,测量装置包括内径检测组件和深度检测组件,内径检测组件包括支撑架和测量臂,测量臂设置在支撑架上;深度检测组件包括悬吊件、连接线和深度位置指示仪,深度位置指示仪通过连接线与悬吊件连接;测量臂和深度位置指示仪的输出端分别通过信号线与处理器电讯连接,处理器的输出端与显示器电讯连接,处理器分析数据信号并将柴油机气缸内对应深度的缸径值通过显示器实时显示;测量方法在活塞上部和下部分别安装内径检测组件和深度检测组件,并通过同一深度位置取多点求平均值,提高了测量精