
四轮独立驱动巡视器运动控制系统.pdf

文光****iu


1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四轮独立驱动巡视器运动控制系统.pdf
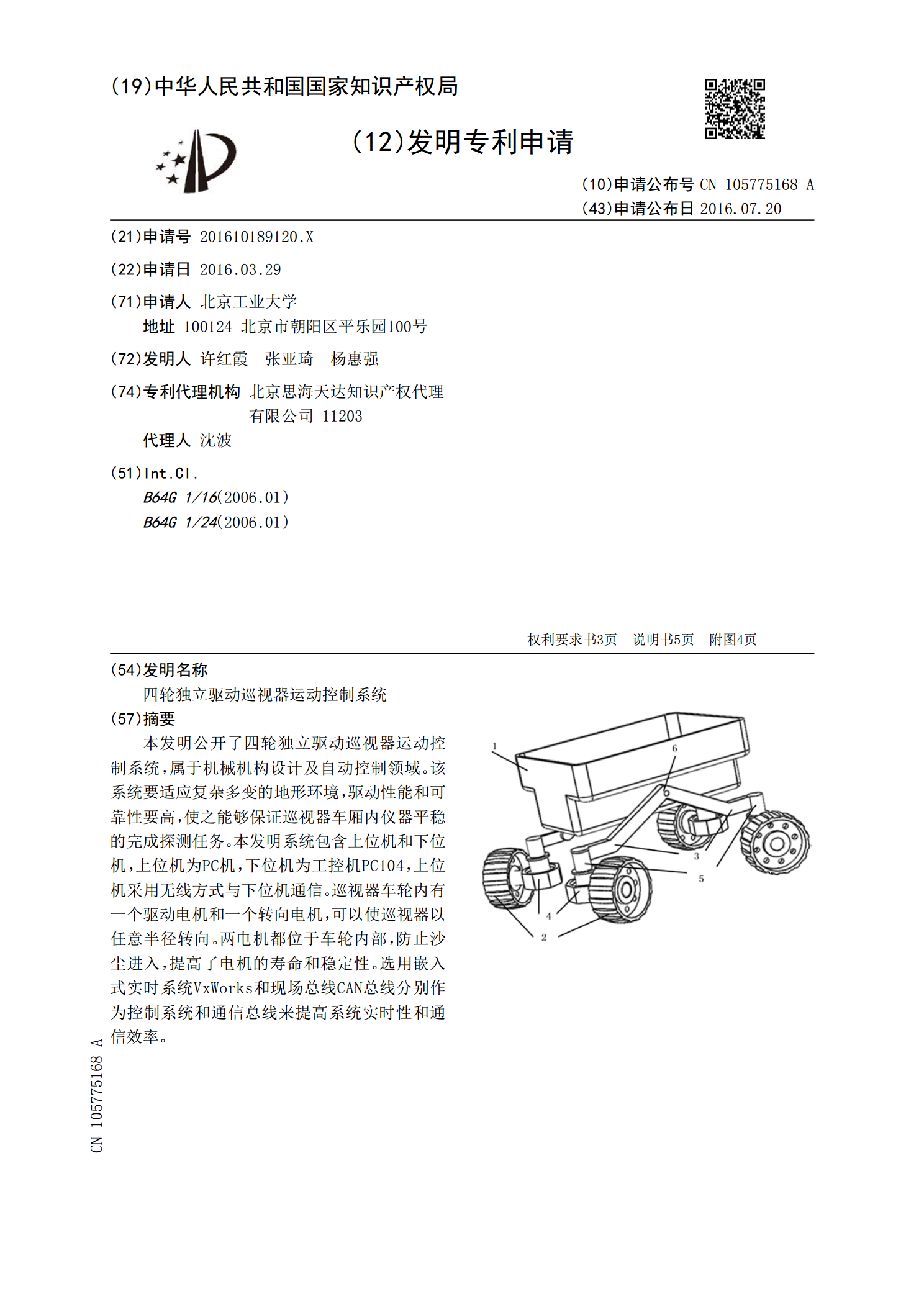
本发明公开了四轮独立驱动巡视器运动控制系统,属于机械机构设计及自动控制领域。该系统要适应复杂多变的地形环境,驱动性能和可靠性要高,使之能够保证巡视器车厢内仪器平稳的完成探测任务。本发明系统包含上位机和下位机,上位机为PC机,下位机为工控机PC104,上位机采用无线方式与下位机通信。巡视器车轮内有一个驱动电机和一个转向电机,可以使巡视器以任意半径转向。两电机都位于车轮内部,防止沙尘进入,提高了电机的寿命和稳定性。选用嵌入式实时系统VxWorks和现场总线CAN总线分别作为控制系统和通信总线来提高系统实时性和

四轮独立驱动巡视器运动控制研究的开题报告.docx
四轮独立驱动巡视器运动控制研究的开题报告开题报告题目:四轮独立驱动巡视器运动控制研究背景:随着科技的不断进步,机器人在各个领域被广泛应用,其中移动机器人是一个重要的研究方向。移动机器人的运动控制是移动机器人研究的核心问题之一,它对机器人的稳定性、灵活性、安全性等方面都有着重要的影响。巡视器是一种常见的移动机器人,它可以通过载荷携带、环境监测、数据采集等功能为广大人民群众提供服务,例如它可以在建筑物外壳巡视、监测各种基础设施、检查管线、甚至可以应用于紧急情况下的应急救援等方面。目前市场上的巡视器多为采用双轮

用于驱动探针运动的压电陶瓷执行器及其驱动控制系统.pdf
本公开描述了一种用于驱动探针运动的压电陶瓷执行器及其驱动控制系统,该压电陶瓷执行器包括驱动器外壳,设置在驱动器外壳内的压电陶瓷、杠杆、撞针,以及设置在驱动器外壳外的撞针接板;压电陶瓷的一端由可调节的螺丝活动连接在驱动器外壳内,压电陶瓷的另一端活动连接杠杆的一端,杠杆的另一端活动连接撞针的一端,撞针的主体部分设置在固定于驱动器外壳上的套筒内,撞针的另一端穿过套筒而抵接撞针接板,撞针的另一端开设有安装探针的开槽;其中,压电陶瓷和撞针分别与杠杆相垂直设置。由此,能够在较小的空间内实现对设置在撞针末端的探针的精准

驱动器在运动控制系统中的应用研究.pdf
⋯制机Fu交流伺服驱动器在运动控制系统中的应用研究1.!.;竺赢L一运动控制嚣n}刊!竖竺兰兰::!H皇坐:!IAbs咖ct:Thi8传统交流伺服运动控制系统姜文喜int州uced兰磊关键词:运动控制;交流伺服系统;现场总线;工控机;PLCse“o出veVdety一154一L|伺服驱动器。+。卜_r西i石;习摘要:介绍传统交流伺服驱动器的工控机和PLc的控制方式及主流现场总线和交流伺服运动控制系统的构成。分析了采用各种运动控制系统的特点及在具体运动控制系统中的适用性;介绍了交流伺服运动控制系统的构成方案和
环形浸出器的驱动控制系统.pdf
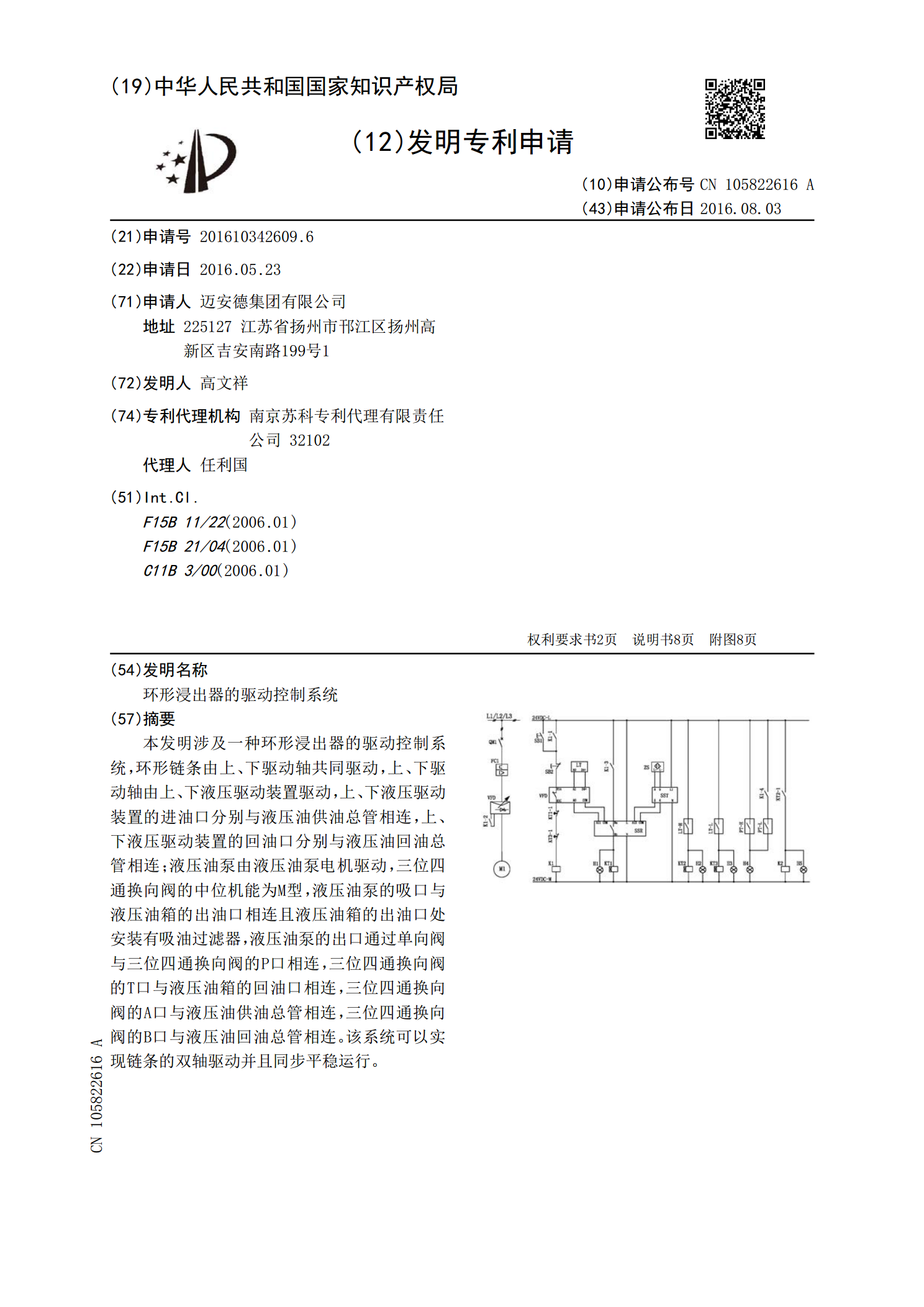
本发明涉及一种环形浸出器的驱动控制系统,环形链条由上、下驱动轴共同驱动,上、下驱动轴由上、下液压驱动装置驱动,上、下液压驱动装置的进油口分别与液压油供油总管相连,上、下液压驱动装置的回油口分别与液压油回油总管相连;液压油泵由液压油泵电机驱动,三位四通换向阀的中位机能为M型,液压油泵的吸口与液压油箱的出油口相连且液压油箱的出油口处安装有吸油过滤器,液压油泵的出口通过单向阀与三位四通换向阀的P口相连,三位四通换向阀的T口与液压油箱的回油口相连,三位四通换向阀的A口与液压油供油总管相连,三位四通换向阀的B口与液