
步进式管道机器人.pdf

觅松****哥哥

1/9

2/9

3/9

4/9
5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
步进式管道机器人.pdf
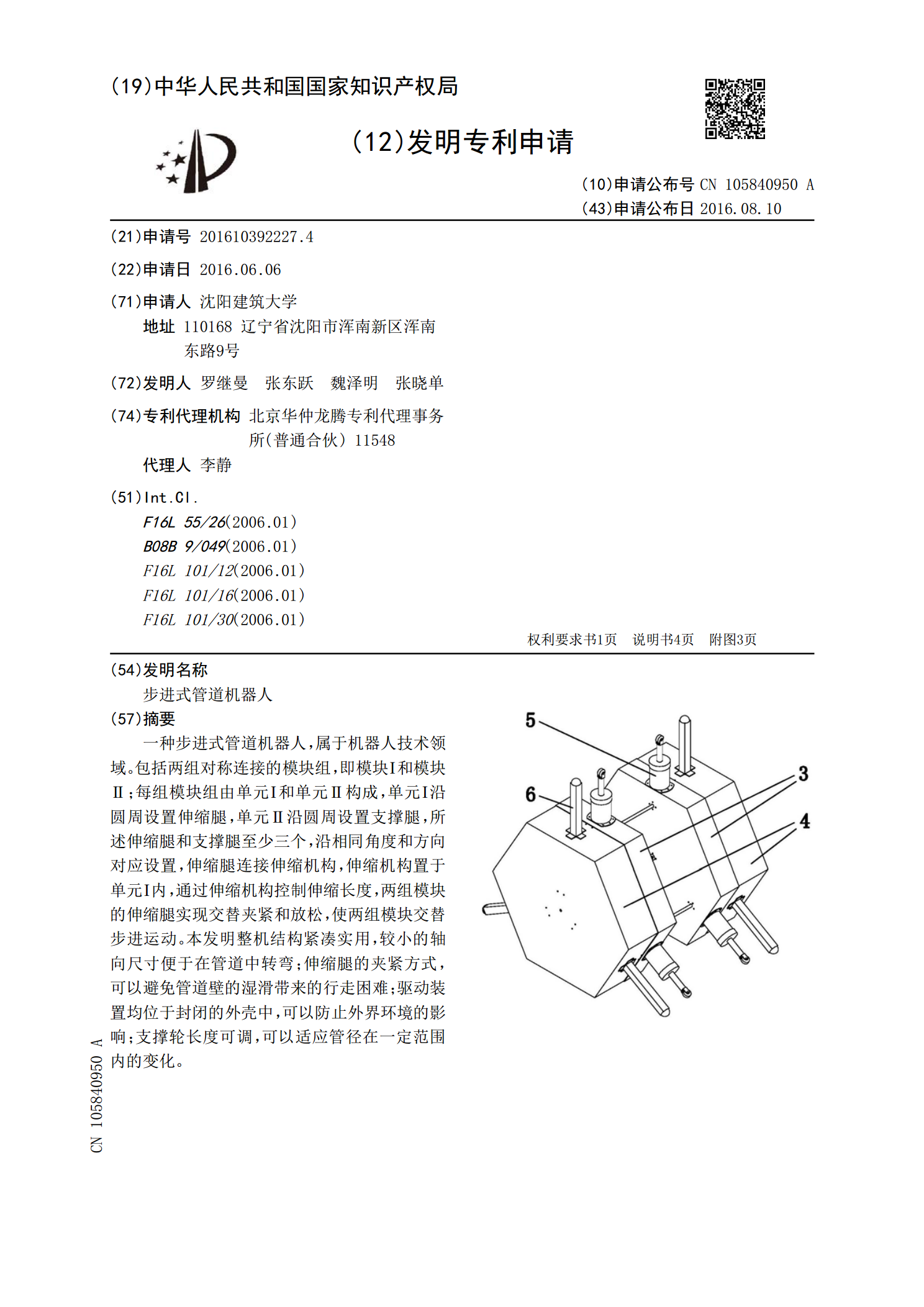
一种步进式管道机器人,属于机器人技术领域。包括两组对称连接的模块组,即模块Ⅰ和模块Ⅱ;每组模块组由单元Ⅰ和单元Ⅱ构成,单元Ⅰ沿圆周设置伸缩腿,单元Ⅱ沿圆周设置支撑腿,所述伸缩腿和支撑腿至少三个,沿相同角度和方向对应设置,伸缩腿连接伸缩机构,伸缩机构置于单元Ⅰ内,通过伸缩机构控制伸缩长度,两组模块的伸缩腿实现交替夹紧和放松,使两组模块交替步进运动。本发明整机结构紧凑实用,较小的轴向尺寸便于在管道中转弯;伸缩腿的夹紧方式,可以避免管道壁的湿滑带来的行走困难;驱动装置均位于封闭的外壳中,可以防止外界环境的影响;
步进式管道机器人.pdf
本发明提供一种步进式管道机器人,它包括第一体部和第二体部,在第一体部和第二体部设有用于交替支撑住管壁的支撑装置,在第一体部与第二体部之间设有用于改变第一体部和第二体部之间距离的行走装置。通过设置的两个体部的结构、支撑四边形机构和改变两个体部之间距离的行走装置,实现了管道机器人在管道内的步进式行走,该结构相对现有技术的轮式行走,具有行走更加可靠,受地形影响较小的优点。采用该行走方案,也有利于简化整体结构。

步进式管道排队装置.pdf
一种步进式管道排队装置,设有一履带式输送带,输送带机架的一侧安装一控制摆角的液压缸,液压缸上侧的机架上安装有一摆动臂,液压缸的活塞杆与摆动臂枢接在一起。输送带的履带板上设有弧形隔离槽;摆动臂的一端为弧形,安装后弧形端位于输送带的前端;输送带驱动轮的电机上安装有控制电机运转的检测开关。本发明可以先将管道预先吊运至排队装置上,并根据需求不间断步进输送管道到输送线上,保证送管连续性,大大提高了送管效率。
六轮步进式机器人全向移动平台.pdf
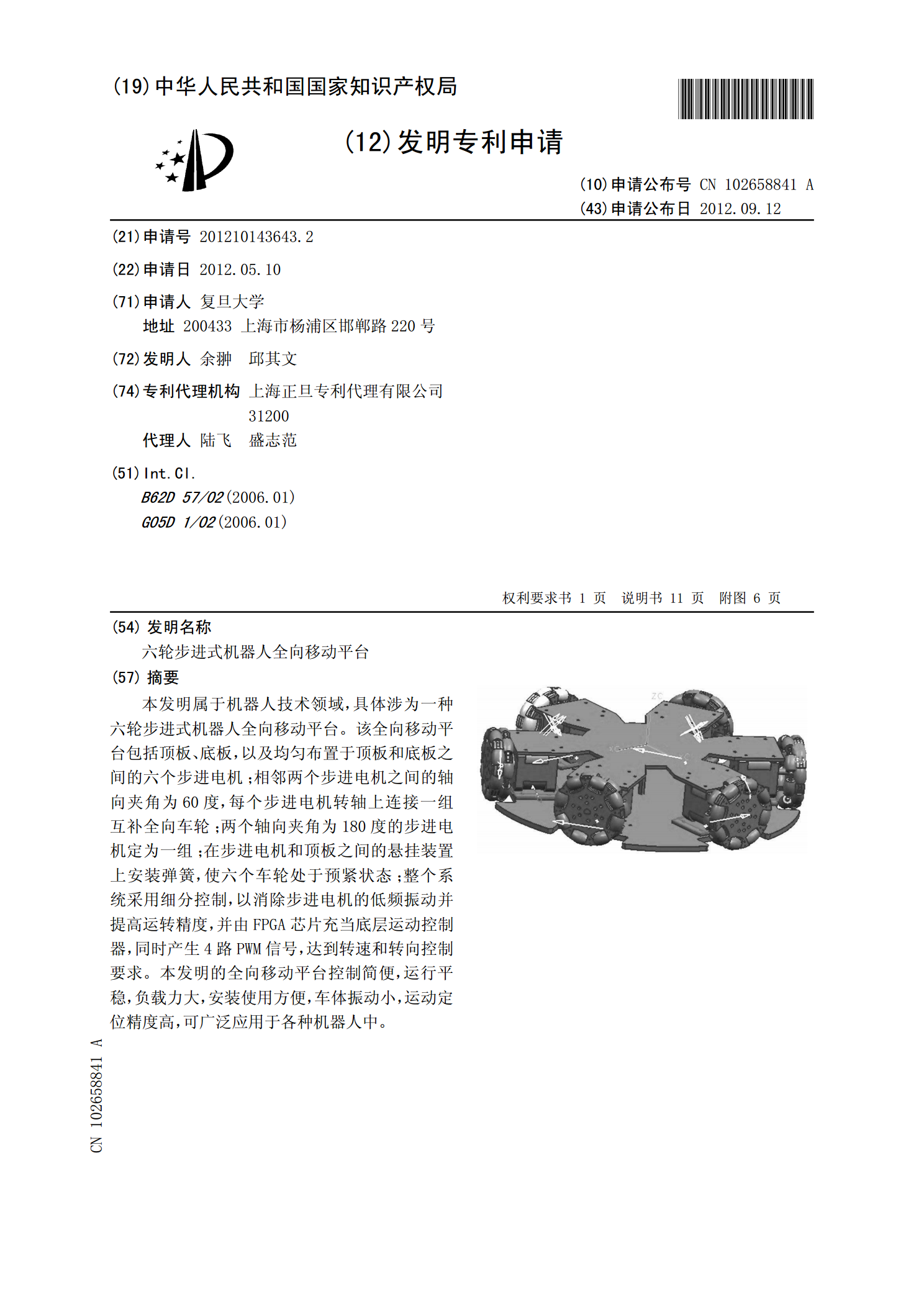
本发明属于机器人技术领域,具体涉为一种六轮步进式机器人全向移动平台。该全向移动平台包括顶板、底板,以及均匀布置于顶板和底板之间的六个步进电机;相邻两个步进电机之间的轴向夹角为60度,每个步进电机转轴上连接一组互补全向车轮;两个轴向夹角为180度的步进电机定为一组;在步进电机和顶板之间的悬挂装置上安装弹簧,使六个车轮处于预紧状态;整个系统采用细分控制,以消除步进电机的低频振动并提高运转精度,并由FPGA芯片充当底层运动控制器,同时产生4路PWM信号,达到转速和转向控制要求。本发明的全向移动平台控制简便,运行
一种步进式爬杆机器人.pdf
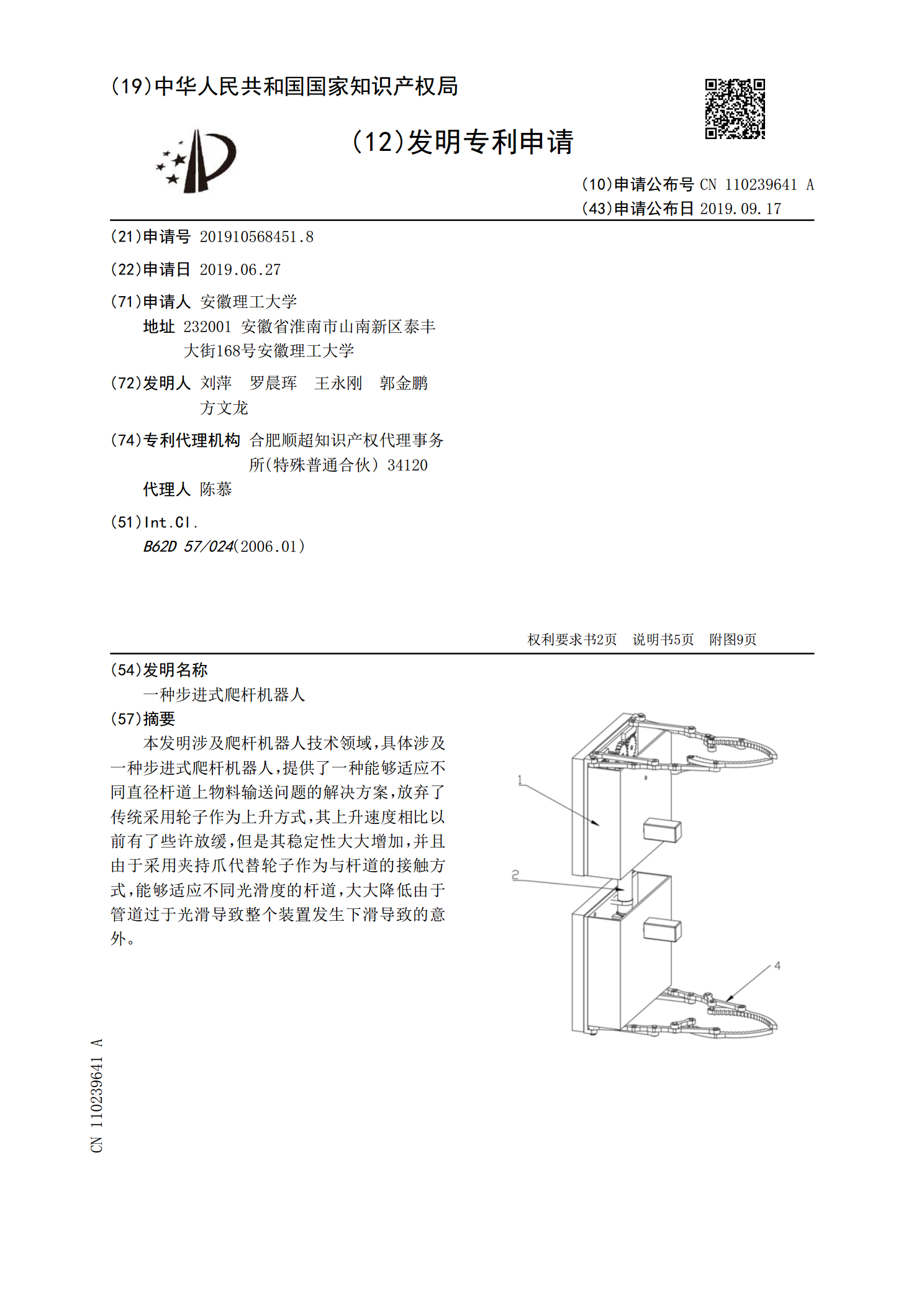
本发明涉及爬杆机器人技术领域,具体涉及一种步进式爬杆机器人,提供了一种能够适应不同直径杆道上物料输送问题的解决方案,放弃了传统采用轮子作为上升方式,其上升速度相比以前有了些许放缓,但是其稳定性大大增加,并且由于采用夹持爪代替轮子作为与杆道的接触方式,能够适应不同光滑度的杆道,大大降低由于管道过于光滑导致整个装置发生下滑导致的意外。