
一种用于高压输电线路的除冰机器人.pdf

一吃****福乾


1/8

2/8

3/8
4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于高压输电线路的除冰机器人.pdf
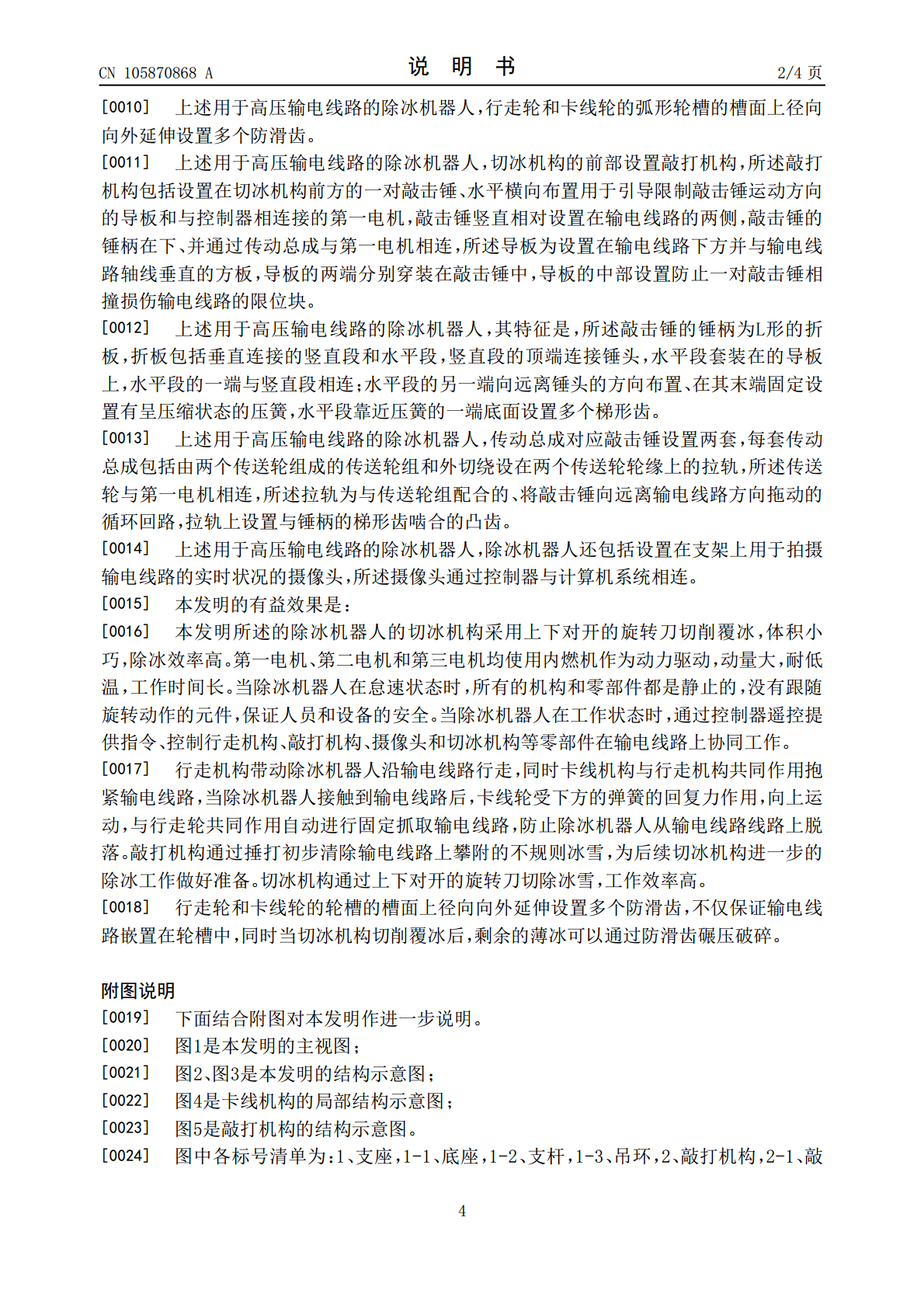
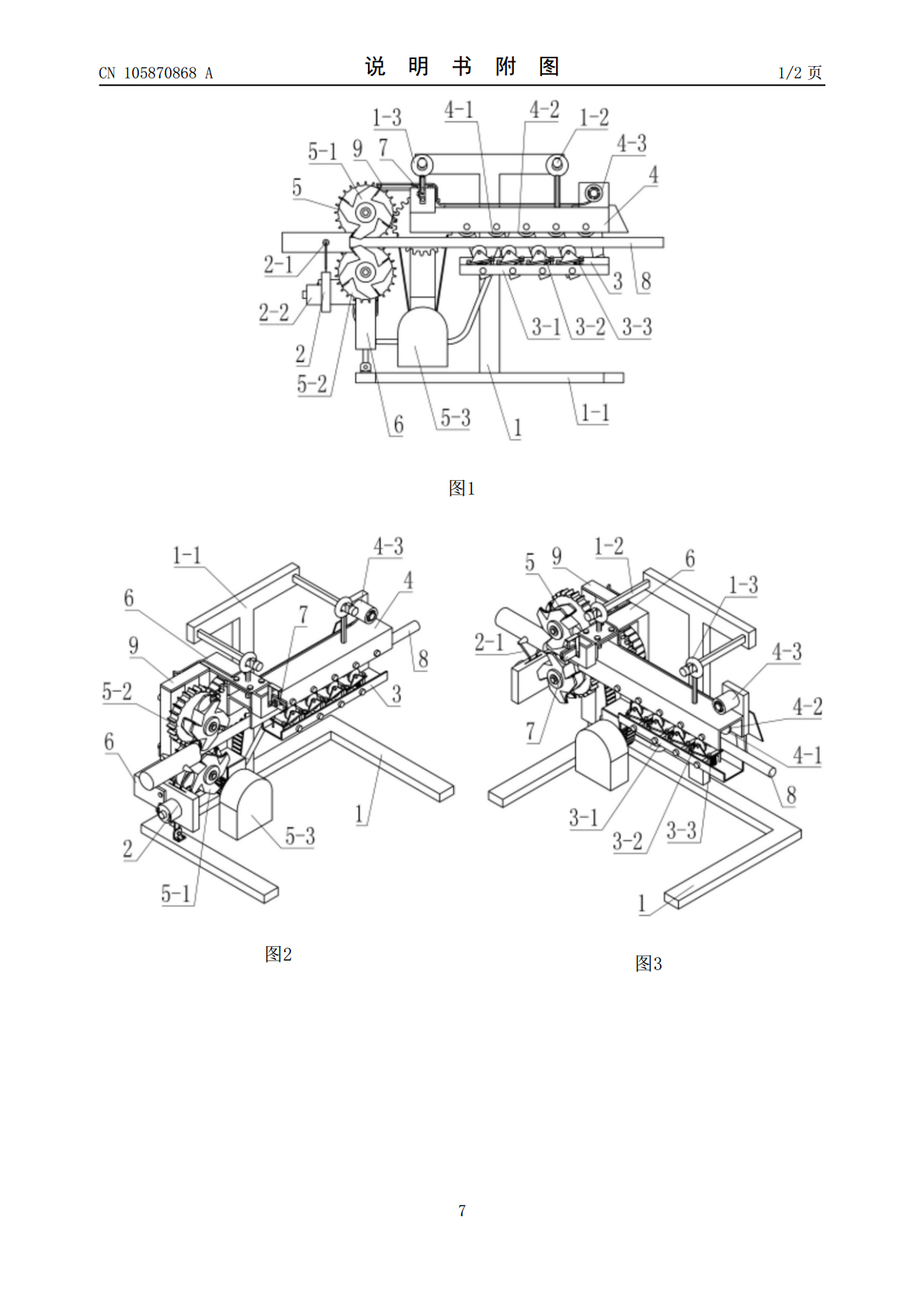
本发明提供了一种用于高压输电线路的除冰机器人,它包括支架、卡线机构、切冰机构、行走机构和控制器,所述行走机构和卡线机构均设置在支架的后部,行走机构设置在卡线机构的正上方、并与控制器相连,所述切冰机构设置在支架的前部,切冰机构包括一对上下对开设置的切削碾压覆冰的旋转刀、与旋转刀相连的驱动齿轮和为驱动齿轮提供电力的第三电机,所述第三电机与控制器相连。使用本发明在低温环境下长时间工作,提高了工作效率,降低了劳动强度。

一种高压输电线路除冰机器人.pdf
本发明公开了一种高压输电线路除冰机器人,除冰机器人由滑车及控制系统构成,控制器置于滑车内部,滑车由车体、悬挂臂、滑轮、除冰机构、动力系统、蓄电池及驱动机构构成,除冰机构由机架、除冰轮、除冰驱动机构及升降驱动机构构成,控制器由气压传感器、气温传感器、湿度传感器、风速传感器、降水量传感器、充放电控制器、GPS模块、驱动模块、双向可控硅模块、通讯模块、数据处理模块及数据存储模块构成。本发明可对输电线路温度、湿度及结冰状况进行全程监控,数据信息采集准确且全面,并自动进行除冰,且除冰过程采用热融化及物理切割同步进行

高压输电线路智能除冰机器人.pdf
本发明提供了一种高压输电线路智能除冰机器人,其特征在于,包括机体与安装在机体上的挂线机构、行走驱动机构、制动机构和除冰机构;所述的挂线机构包括轮架、安装在轮架上的3个共面的同时起到挂线作用的行走轮、L形进线槽、托线机构和安装于托线机构顶端的4个共面的托线轮、用于调节托线机构上下位置的杠杆机构;所述的制动机构由抱刹夹爪、用于夹爪复位的回位弹簧以及用于驱动夹爪开合的电动推杆组成;所述的除冰机构包括除冰电机、凸轮、破冰钢刀、滑块、拉紧弹簧、用于固定破冰钢刀的支撑圆盘;本发明的高压输电线路智能除冰机器人结构简单可

用于沿架空高压输电线路自动除冰机器人的行驶机构.pdf
一种用于沿架空高压输电线路自动除冰机器人的行驶机构,它包括大臂伸缩机构、两伸缩机械手机构、行走轮机构和夹紧机构,两伸缩机械手机构下端与大臂伸缩机构两端的转动机构连接,两伸缩机械手机构可围绕铅垂轴转动,由行走轮和行走轮驱动机构组成,行走轮驱动机构与伸缩机械手机构的上端连接,夹紧机构与伸缩机械手机构连接,夹紧机构可随着伸缩机械手机构的伸缩夹紧/松开输电线。本发明提供的用于沿架空高压输电线路自动除冰机器人的行驶机构,越障能力强,不需人工带电将其从障碍物的一侧搬运到另一侧,安全可靠,极大地降低了劳动强度,可不受外

一种用于架空高压输电线路的自动除冰装置.pdf
本发明公开了一种用于架空高压输电线路的自动除冰装置,涉及架空输电线缆保护设备技术领域,以解决现有除冰机构的刀头无法调整间距或只能在施工现场拆装整机结构的情况下才能调节刀片破冰位置的问题,其包括机壳,机壳上安装有主动轮和从动轮,机壳内设有驱动电机和涡轮蜗杆机构,蜗杆前端伸出机壳并连接有随蜗杆转动而转动的旋转体,旋转体上设有机械除冰机构,机械除冰机构包括转动柱和沿转动柱径向均匀布置的多个刀片,转动柱内设有用于调节刀片锁紧位置的锁紧机构,通过实施本技术方案,可有效避免除冰机构的刀头无法调整间距或只能在施工现场拆