
一种仿生蜻蜓扑翼机器人.pdf

努力****星驰


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仿生蜻蜓扑翼机器人.pdf
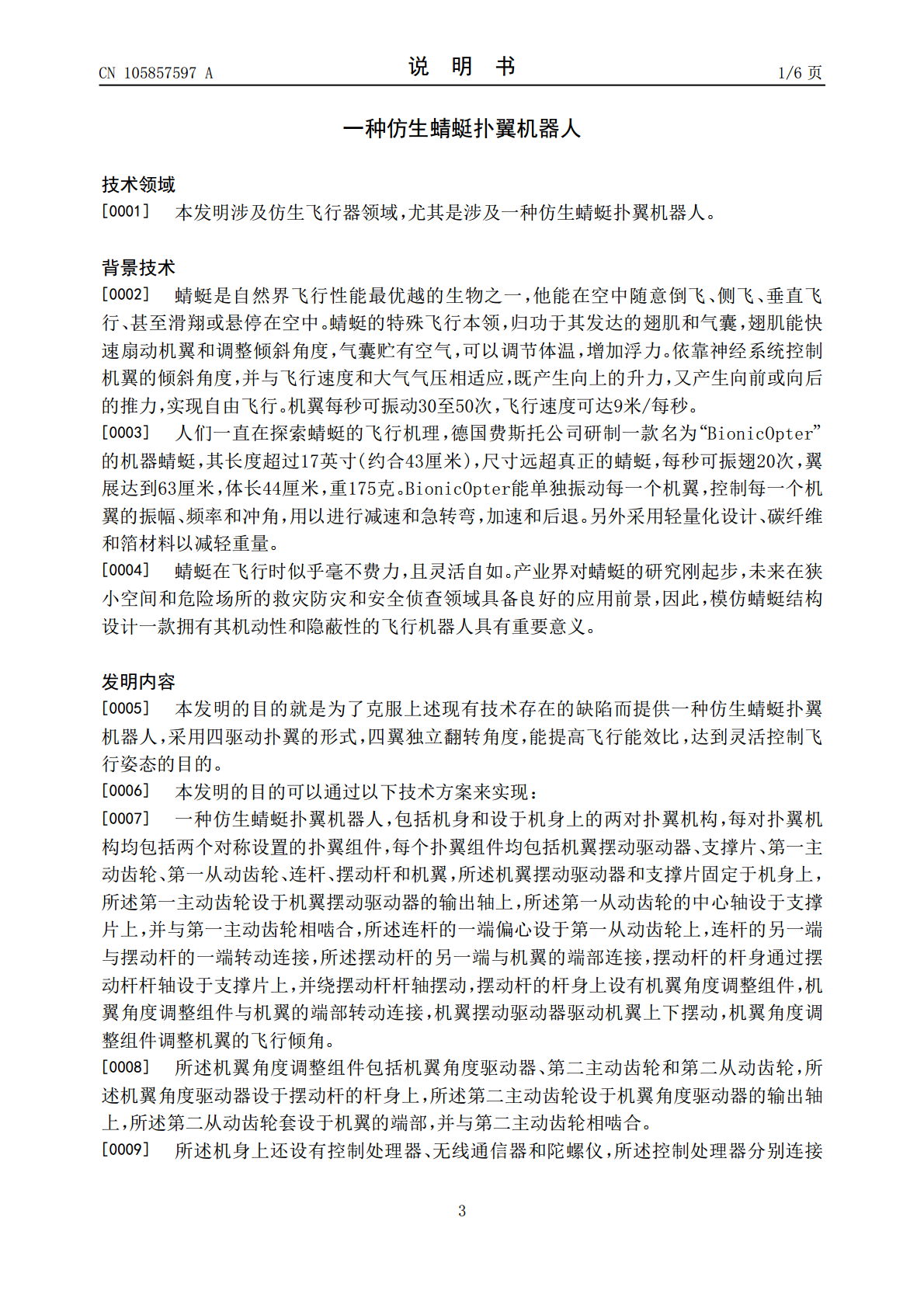
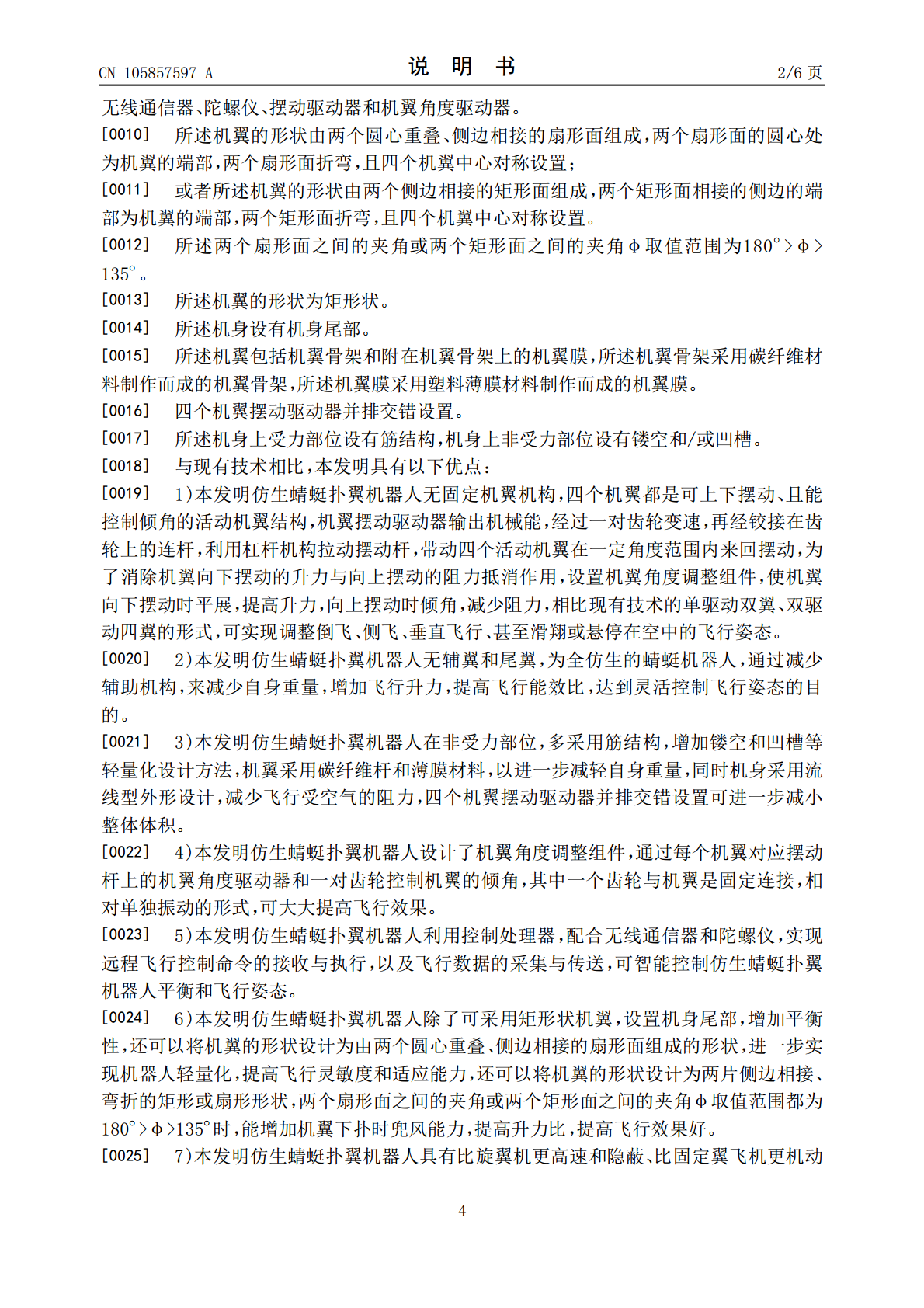
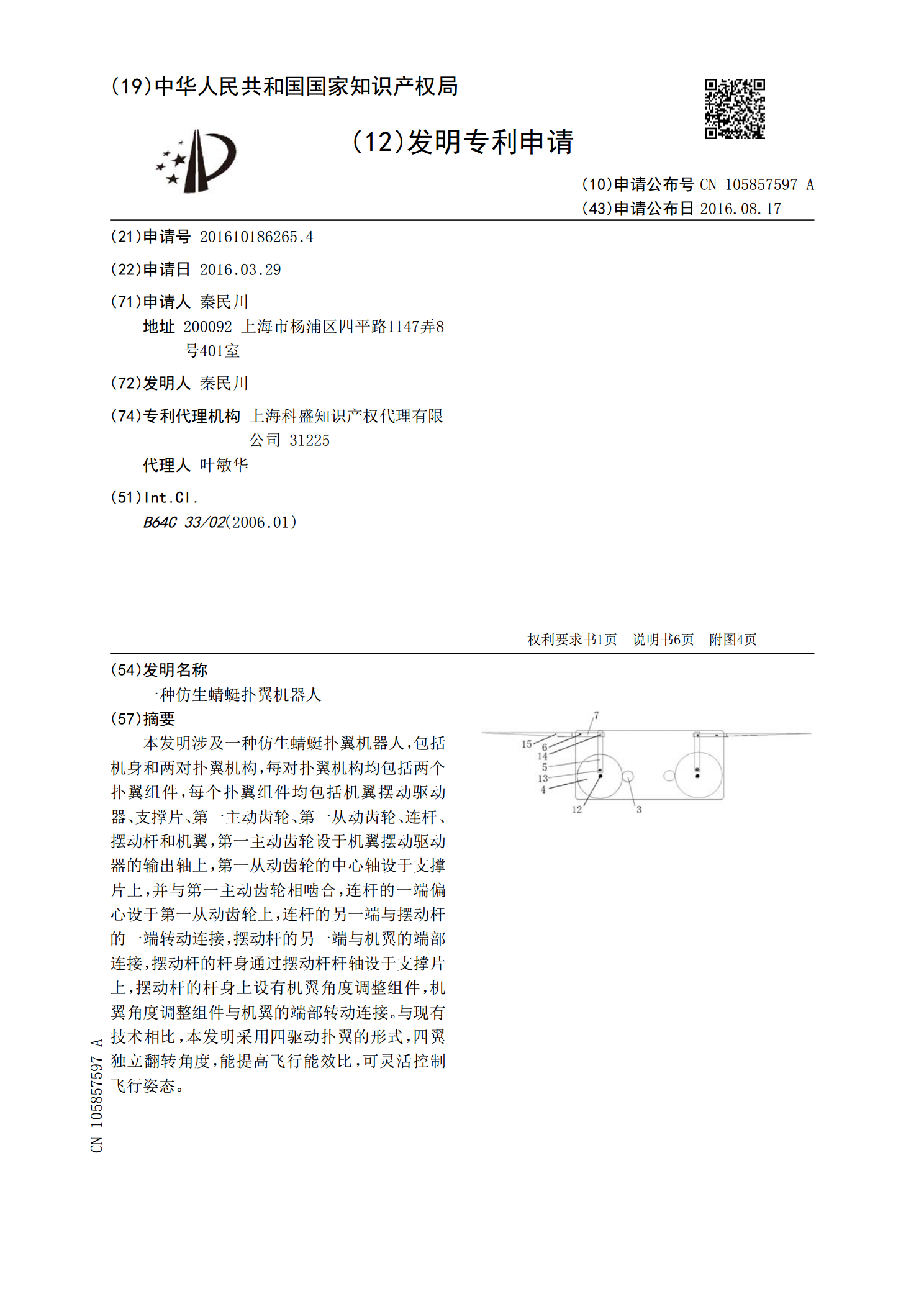
本发明涉及一种仿生蜻蜓扑翼机器人,包括机身和两对扑翼机构,每对扑翼机构均包括两个扑翼组件,每个扑翼组件均包括机翼摆动驱动器、支撑片、第一主动齿轮、第一从动齿轮、连杆、摆动杆和机翼,第一主动齿轮设于机翼摆动驱动器的输出轴上,第一从动齿轮的中心轴设于支撑片上,并与第一主动齿轮相啮合,连杆的一端偏心设于第一从动齿轮上,连杆的另一端与摆动杆的一端转动连接,摆动杆的另一端与机翼的端部连接,摆动杆的杆身通过摆动杆杆轴设于支撑片上,摆动杆的杆身上设有机翼角度调整组件,机翼角度调整组件与机翼的端部转动连接。与现有技术相比
一种微型仿生扑翼机器人.pdf
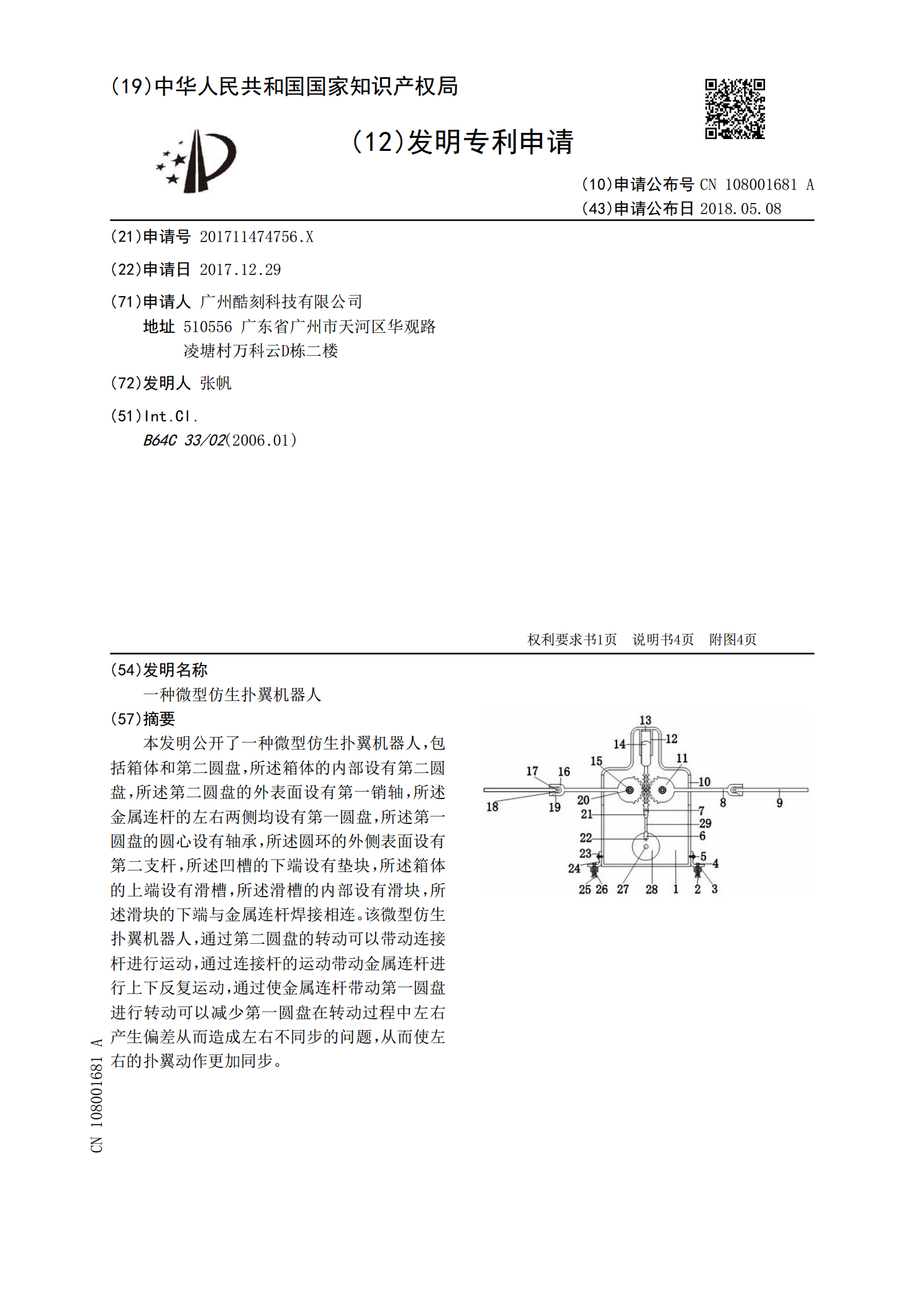
本发明公开了一种微型仿生扑翼机器人,包括箱体和第二圆盘,所述箱体的内部设有第二圆盘,所述第二圆盘的外表面设有第一销轴,所述金属连杆的左右两侧均设有第一圆盘,所述第一圆盘的圆心设有轴承,所述圆环的外侧表面设有第二支杆,所述凹槽的下端设有垫块,所述箱体的上端设有滑槽,所述滑槽的内部设有滑块,所述滑块的下端与金属连杆焊接相连。该微型仿生扑翼机器人,通过第二圆盘的转动可以带动连接杆进行运动,通过连接杆的运动带动金属连杆进行上下反复运动,通过使金属连杆带动第一圆盘进行转动可以减少第一圆盘在转动过程中左右产生偏差从而
一种仿生扑翼飞行器.pdf
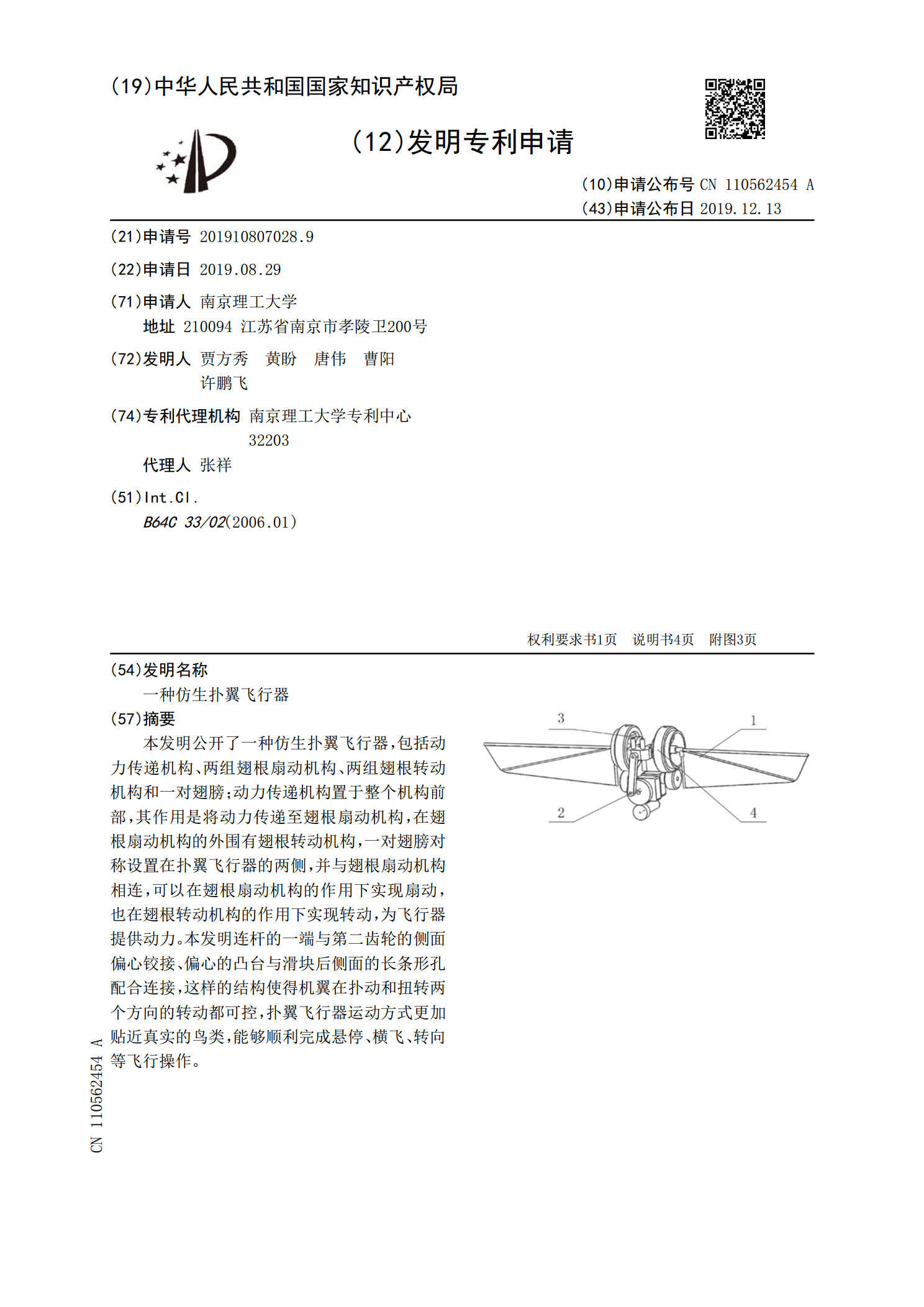
本发明公开了一种仿生扑翼飞行器,包括动力传递机构、两组翅根扇动机构、两组翅根转动机构和一对翅膀;动力传递机构置于整个机构前部,其作用是将动力传递至翅根扇动机构,在翅根扇动机构的外围有翅根转动机构,一对翅膀对称设置在扑翼飞行器的两侧,并与翅根扇动机构相连,可以在翅根扇动机构的作用下实现扇动,也在翅根转动机构的作用下实现转动,为飞行器提供动力。本发明连杆的一端与第二齿轮的侧面偏心铰接、偏心的凸台与滑块后侧面的长条形孔配合连接,这样的结构使得机翼在扑动和扭转两个方向的转动都可控,扑翼飞行器运动方式更加贴近真实的

一种弹跳扑翼机器人及其弹跳扑翼方法.pdf
本发明公开了一种弹跳扑翼机器人及其弹跳扑翼方法.自然界中一些小型昆虫,如蟋蟀,蚱蜢等,用腿部肌肉起跳,在空中用翅膀调整姿态,增强了起跳和落地阶段的稳定性。本发明一种弹跳扑翼机器人,包括机架、弹跳机构、复用驱动机构和扑翼机构。弹跳机构包括四根传动绳和四根弹腿。扑翼机构包括扑翼架、扑翼输入轴、扑翼输入齿轮、第一中间齿轮、第二中间齿轮、第三中间齿轮、扑翼输出齿轮和单侧扑翼组件。复用驱动机构包括弹跳传动组件、扑翼传动组件、动力源组件和传动切换组件。本发明仅使用一个电机驱动就能够完成对弹跳动作和扑翼动作的驱动,有效
一种水下仿生柔性扑翼推进装置.pdf
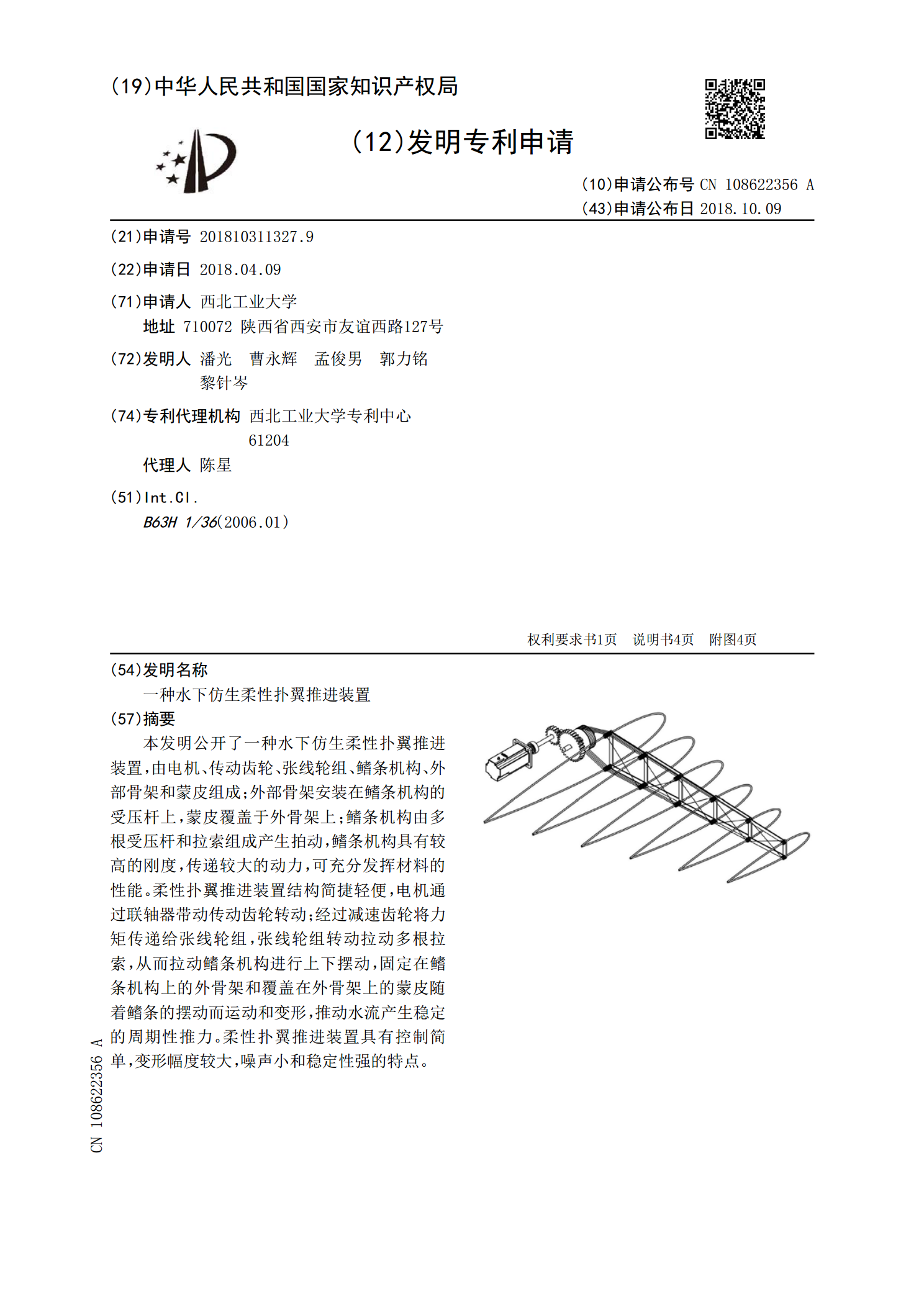
本发明公开了一种水下仿生柔性扑翼推进装置,由电机、传动齿轮、张线轮组、鳍条机构、外部骨架和蒙皮组成;外部骨架安装在鳍条机构的受压杆上,蒙皮覆盖于外骨架上;鳍条机构由多根受压杆和拉索组成产生拍动,鳍条机构具有较高的刚度,传递较大的动力,可充分发挥材料的性能。柔性扑翼推进装置结构简捷轻便,电机通过联轴器带动传动齿轮转动;经过减速齿轮将力矩传递给张线轮组,张线轮组转动拉动多根拉索,从而拉动鳍条机构进行上下摆动,固定在鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随着鳍条的摆动而运动和变形,推动水流产生稳定的周期性推力