
一种微型仿生扑翼机器人.pdf

英哲****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种微型仿生扑翼机器人.pdf
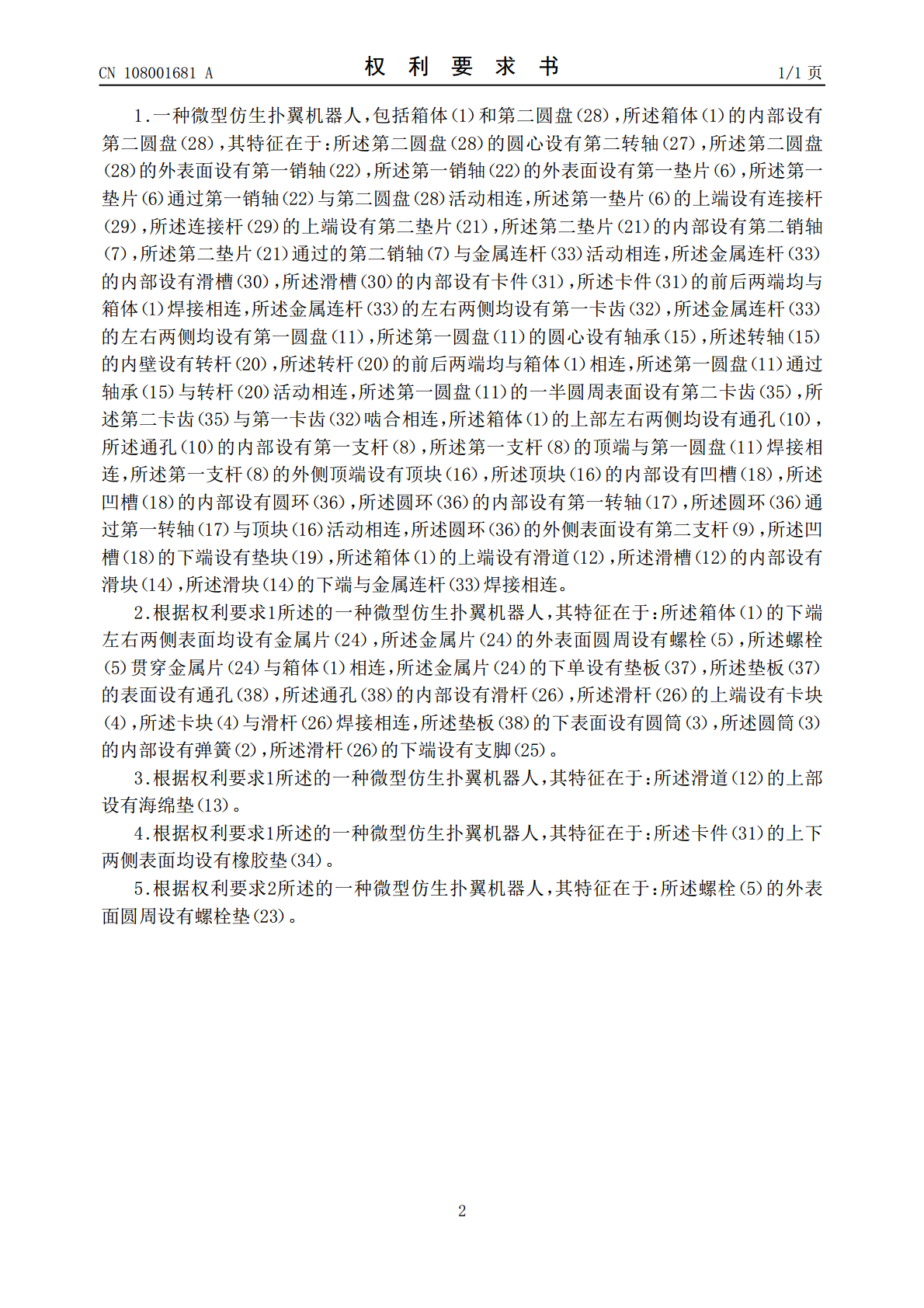
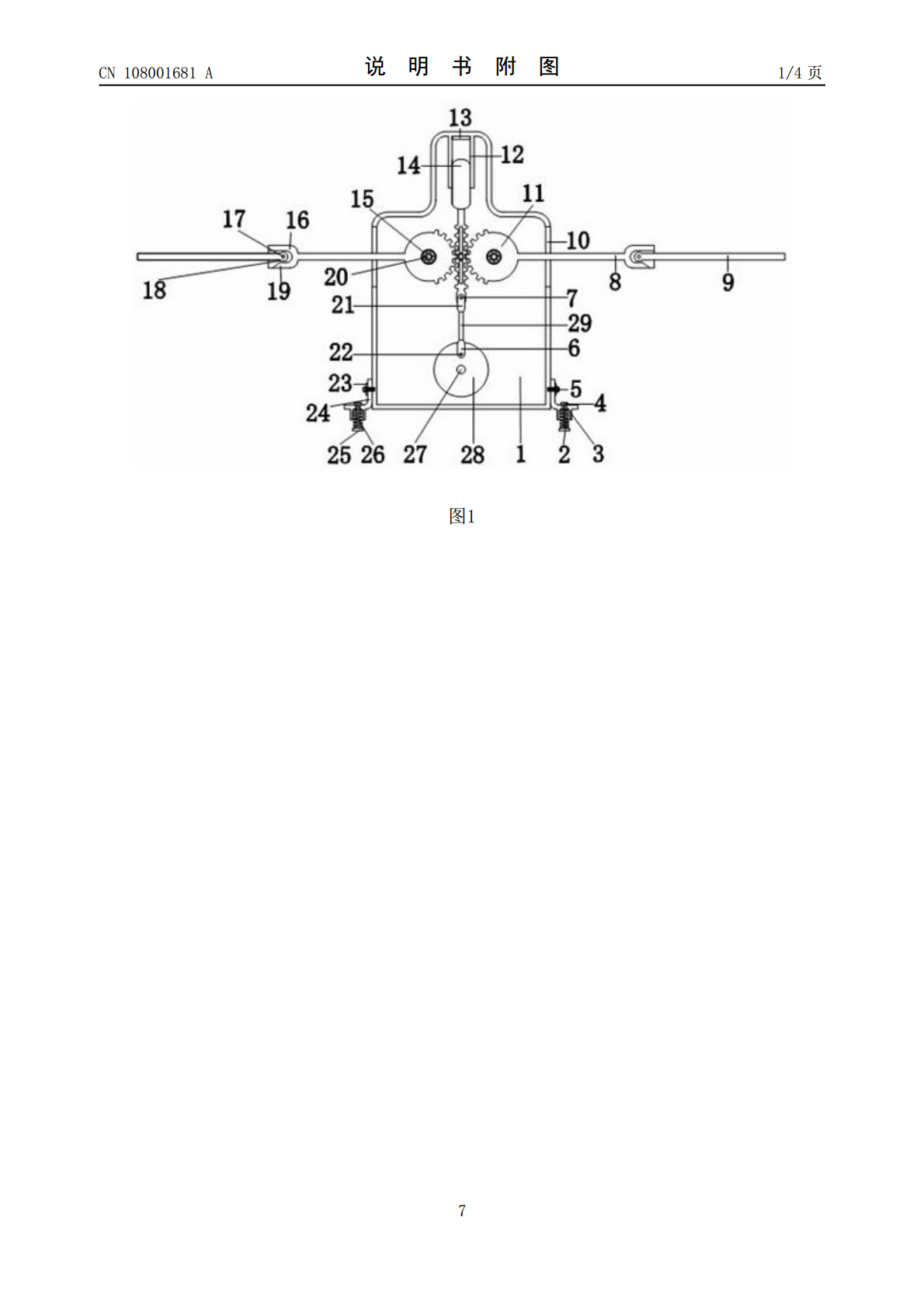
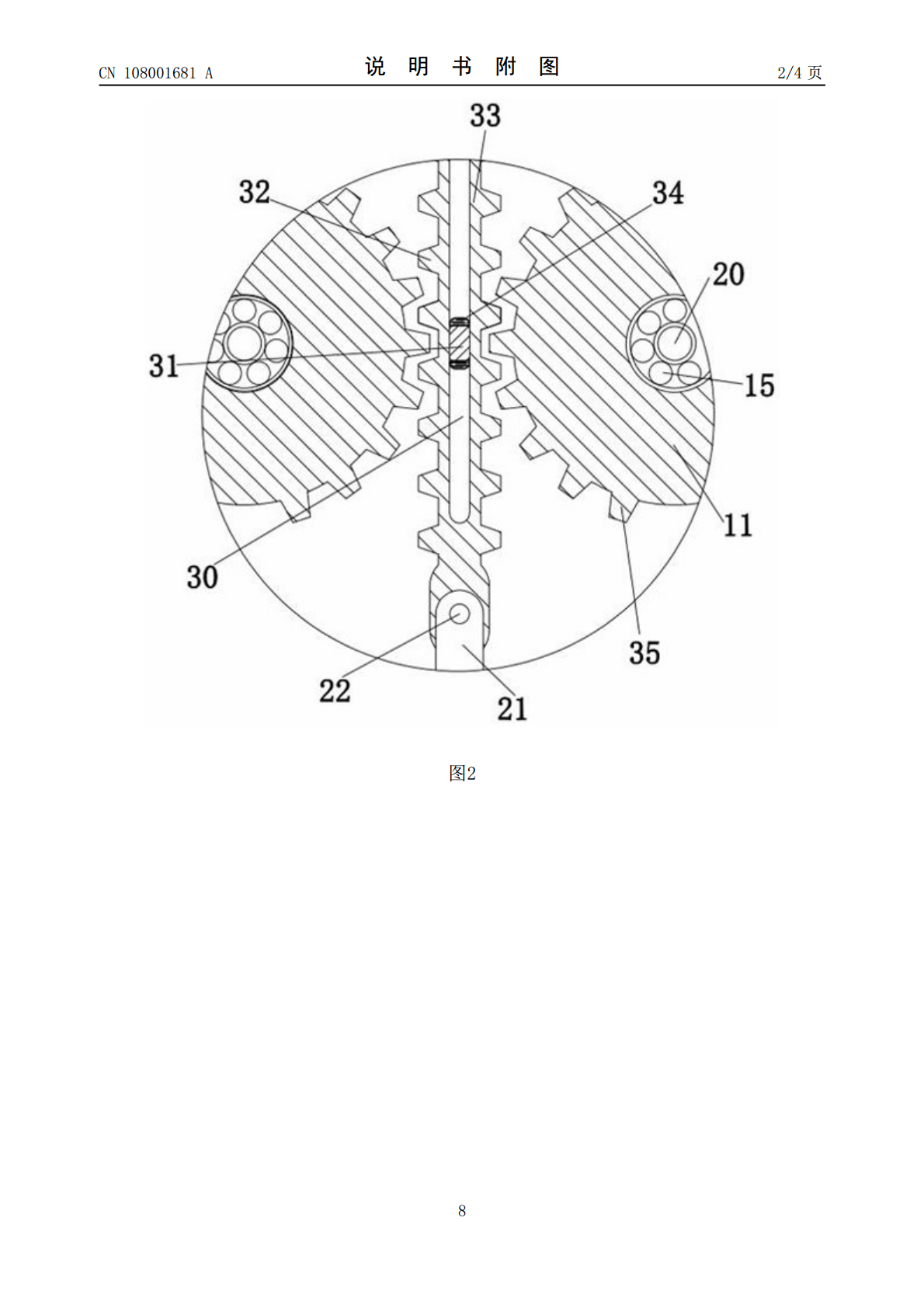
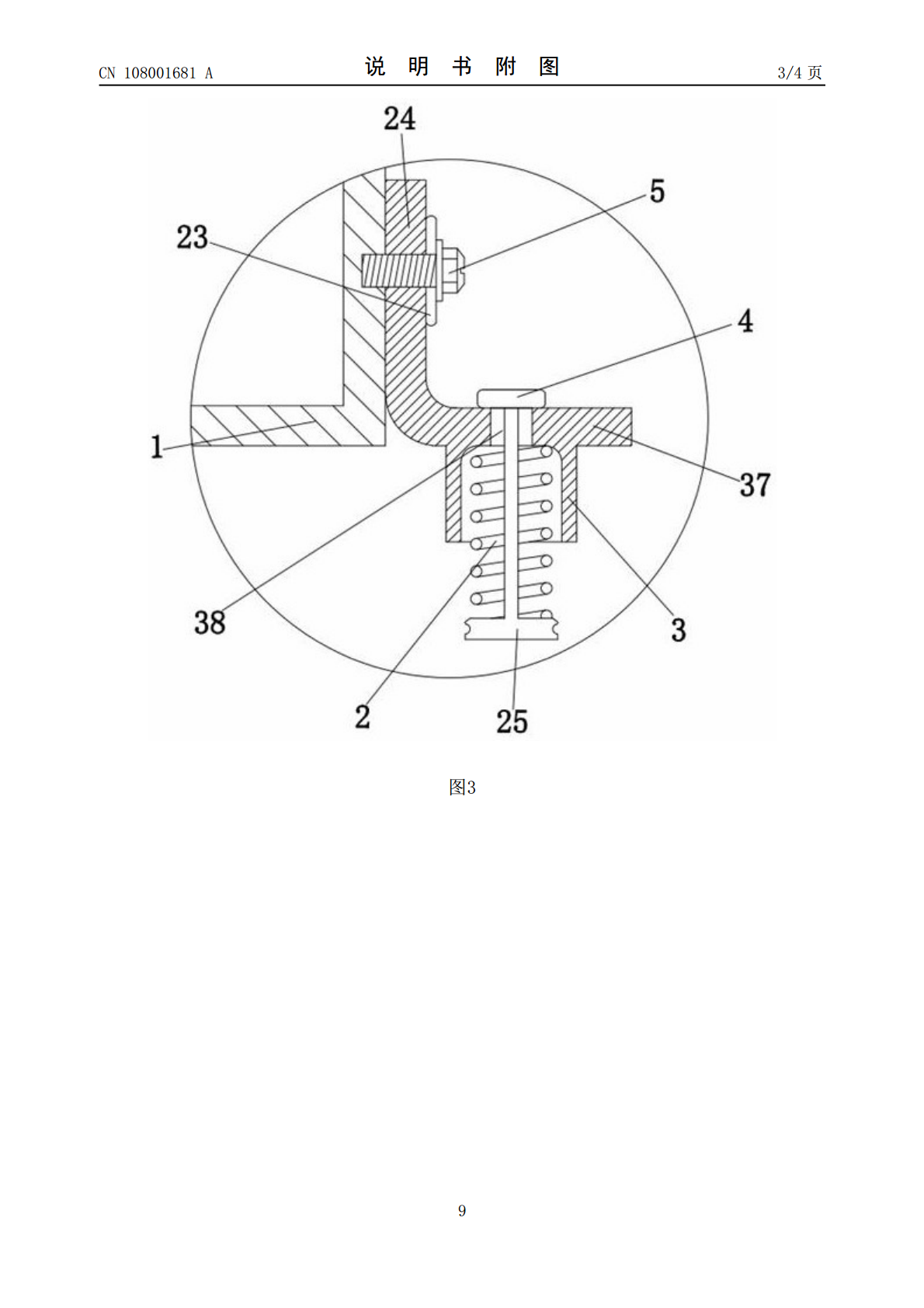
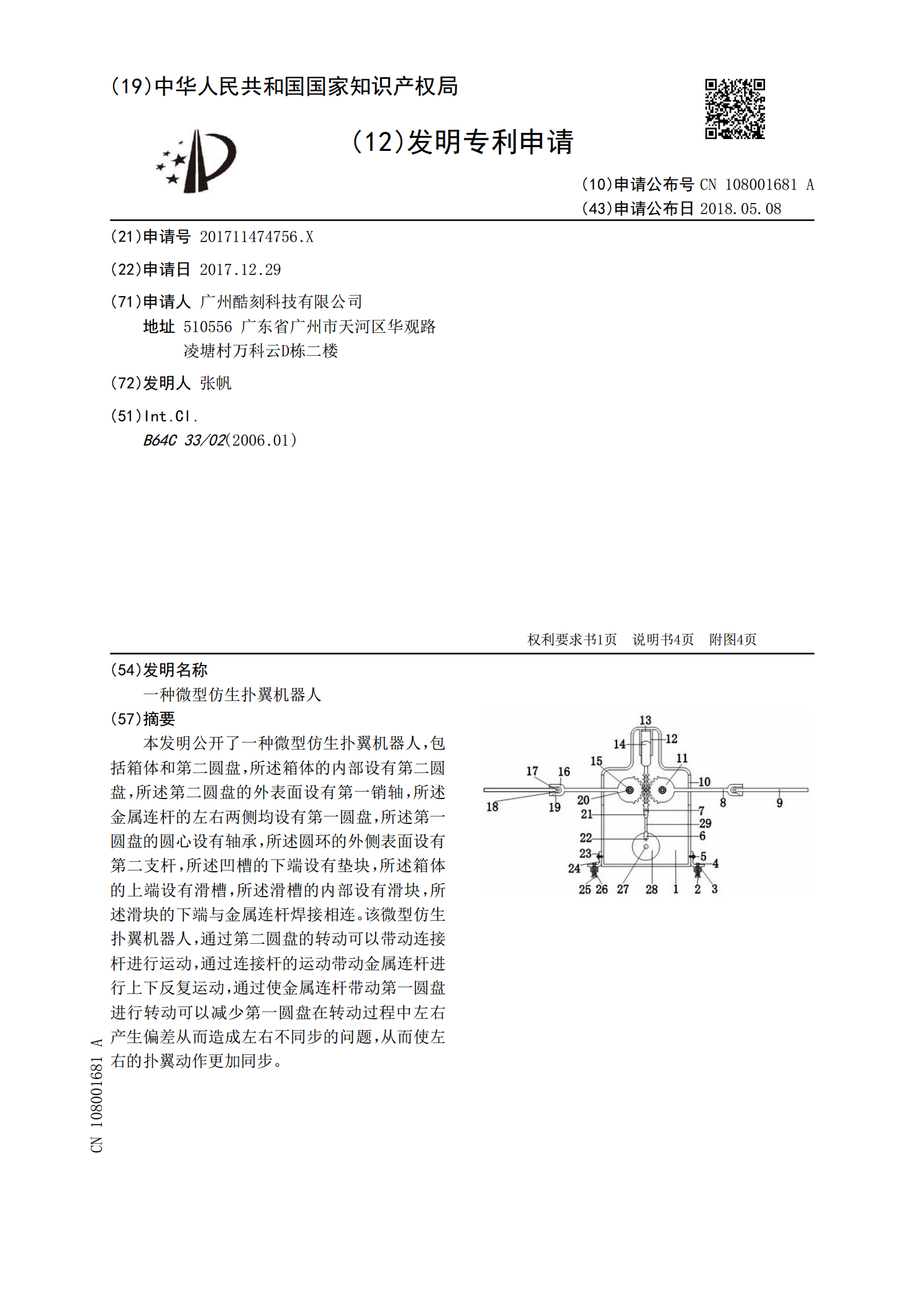
本发明公开了一种微型仿生扑翼机器人,包括箱体和第二圆盘,所述箱体的内部设有第二圆盘,所述第二圆盘的外表面设有第一销轴,所述金属连杆的左右两侧均设有第一圆盘,所述第一圆盘的圆心设有轴承,所述圆环的外侧表面设有第二支杆,所述凹槽的下端设有垫块,所述箱体的上端设有滑槽,所述滑槽的内部设有滑块,所述滑块的下端与金属连杆焊接相连。该微型仿生扑翼机器人,通过第二圆盘的转动可以带动连接杆进行运动,通过连接杆的运动带动金属连杆进行上下反复运动,通过使金属连杆带动第一圆盘进行转动可以减少第一圆盘在转动过程中左右产生偏差从而

微型仿生空间扑翼机构.pdf
本发明公开了一种实现扑翼翼尖做8字型空间运动,翼面做拍打运动、摆动运动和扭转运动的复合运动方法。所述微型仿生空间扑翼机构主要由微型直流电机、减速齿轮、偏转主轴、摆杆、柔性接头、扑翼、扑翼安装支架和箱体构成。微型直流电机通过减速齿轮驱动偏转主轴做回转运动,偏转主轴带动摆杆做空间运动,扑翼安装在扑翼安装支架上,扑翼安装支架通过柔性接头安装在箱体上,另一端通过销轴与摆杆相连,当摆杆做空间运动时带动扑翼翼尖做空间8字型运动。本发明具有结构简单,扑翼运动形式接近鸟类扑翼运动形式的特点。

一种双翼式微型仿生扑翼机.pdf
一种双翼式微型仿生扑翼机,包括驱动机构、双扑翼机构、尾翼机构及主臂,驱动机构连接在主臂的正前端,双扑翼机构位于主臂的正上方,尾翼机构连接在主臂的正后端。驱动机构包括菱形支架、微型直流电机、齿轮减速机构和两个曲柄连杆机构,双扑翼机构包括两个对称扑翼架、四根扑翼安装杆和上下两层扑翼,尾翼机构包含电磁舵、尾翼和摆翼。微型直流电机通过齿轮减速机构和曲柄连杆机构拉动两个扑翼架上下运动,实现仿生扑翼。尾翼机构中的电磁舵通过改变电流方向来控制摆翼左右摆动,从而控制扑翼机的飞行方向。
一种仿生微型扑翼飞行器.pdf
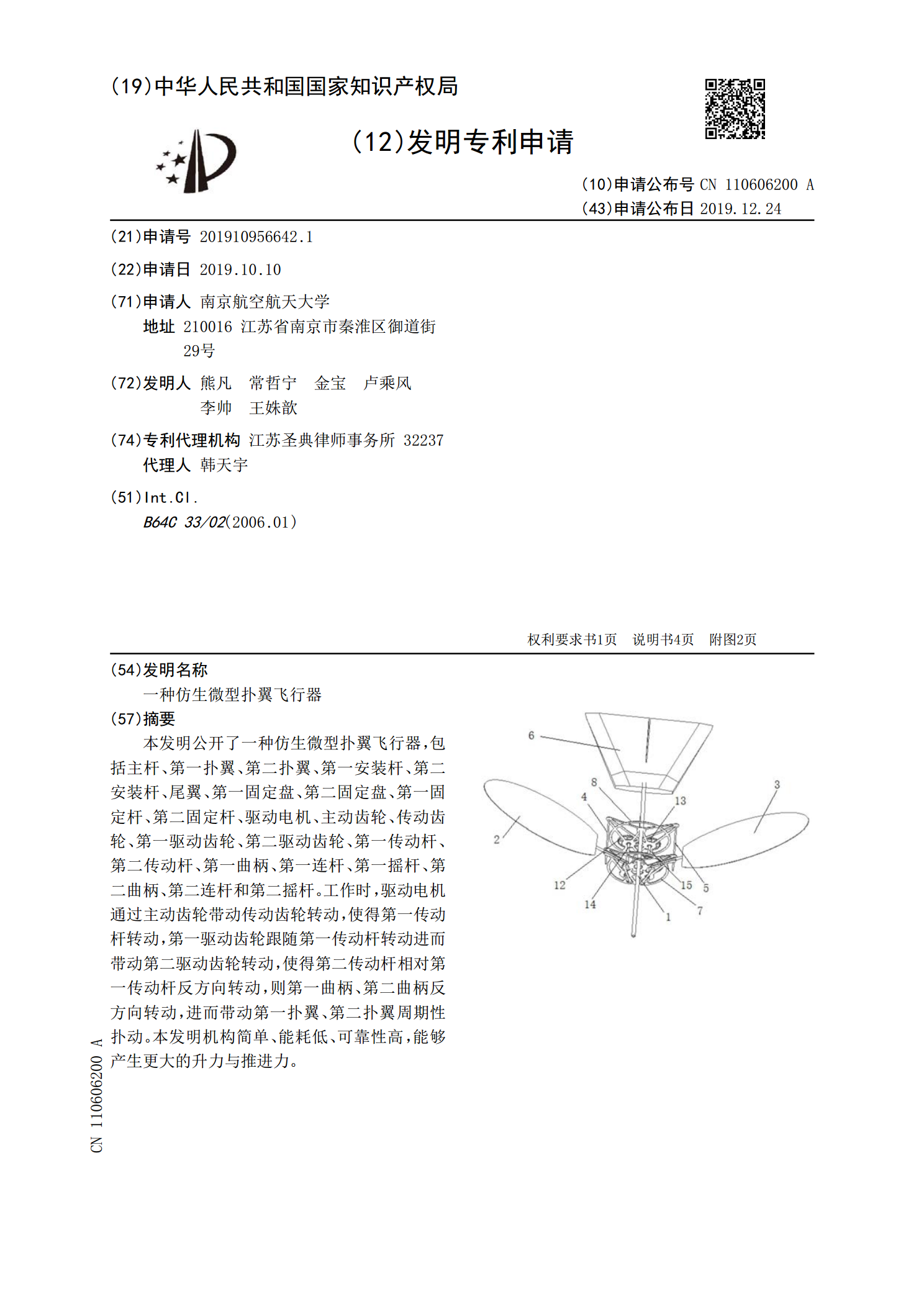
本发明公开了一种仿生微型扑翼飞行器,包括主杆、第一扑翼、第二扑翼、第一安装杆、第二安装杆、尾翼、第一固定盘、第二固定盘、第一固定杆、第二固定杆、驱动电机、主动齿轮、传动齿轮、第一驱动齿轮、第二驱动齿轮、第一传动杆、第二传动杆、第一曲柄、第一连杆、第一摇杆、第二曲柄、第二连杆和第二摇杆。工作时,驱动电机通过主动齿轮带动传动齿轮转动,使得第一传动杆转动,第一驱动齿轮跟随第一传动杆转动进而带动第二驱动齿轮转动,使得第二传动杆相对第一传动杆反方向转动,则第一曲柄、第二曲柄反方向转动,进而带动第一扑翼、第二扑翼周期

一种“8”字形翼尖轨迹的微型仿生扑翼机.pdf
本发明公开一种“8”字形翼尖轨迹的微型仿生扑翼机,包括机架,安装于机架上的动力机构、双曲柄摇杆机构、基于球铰的空间机构和尾翼机构,双曲柄摇杆机构包括两个曲柄锥齿,两个曲柄锥齿相互啮合连接,动力机构与其中一个曲柄锥齿传动连接,基于球铰的空间机构包括两个呈左右对称设置的空间多连杆组件,两个空间多连杆组件与两个曲柄锥齿一一对应连接,曲柄锥齿通过传动连杆带动摇杆摇动,摇杆带动动力输入杆绕第三转动副摆动,翼根控制杆在动力输入杆的带动下和惯性约束杆的约束下运动,翼根控制杆在三个球副的约束下实现扑动、摆动、翻转动作,使