
手术器具和医疗用机械手系统.pdf

运升****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手术器具和医疗用机械手系统.pdf
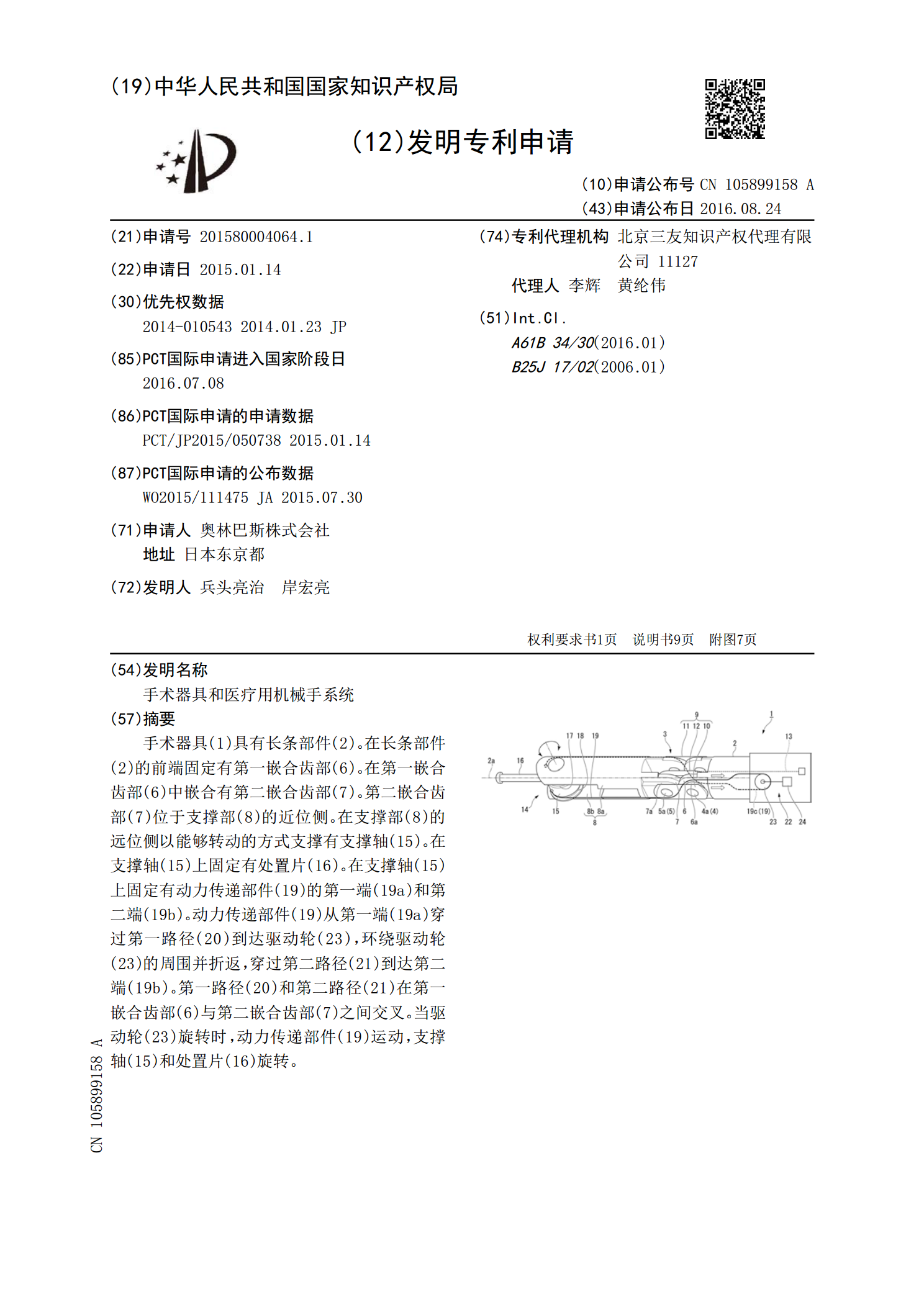
手术器具(1)具有长条部件(2)。在长条部件(2)的前端固定有第一嵌合齿部(6)。在第一嵌合齿部(6)中嵌合有第二嵌合齿部(7)。第二嵌合齿部(7)位于支撑部(8)的近位侧。在支撑部(8)的远位侧以能够转动的方式支撑有支撑轴(15)。在支撑轴(15)上固定有处置片(16)。在支撑轴(15)上固定有动力传递部件(19)的第一端(19a)和第二端(19b)。动力传递部件(19)从第一端(19a)穿过第一路径(20)到达驱动轮(23),环绕驱动轮(23)的周围并折返,穿过第二路径(21)到达第二端(19b)。第

手术器具及医疗用操作装置.pdf
具有长条部件(2)、与长条部件连结的弯曲用双关节(11)、与弯曲用双关节连结的钳子片(7a、7b)、与钳子片连结的开闭用关节(17)、以及与开闭用关节连结的开闭用杆(5),弯曲用双关节具有与长条部件连结的弯曲用第一转动轴(13)和以平行于弯曲用第一转动轴的方式与处置部连结的弯曲用第二转动轴(14),开闭用关节具有与开闭用杆(5)连结并绕规定的转动中心转动的第一齿轮(18)、以与弯曲用第二转动轴同轴且与第一齿轮逆向地相对旋转的方式与第一齿轮连结的第二齿轮(19)、以及将第二齿轮的转动力转换成钳子片的开闭动作
医疗处置器具用丝和导丝.pdf
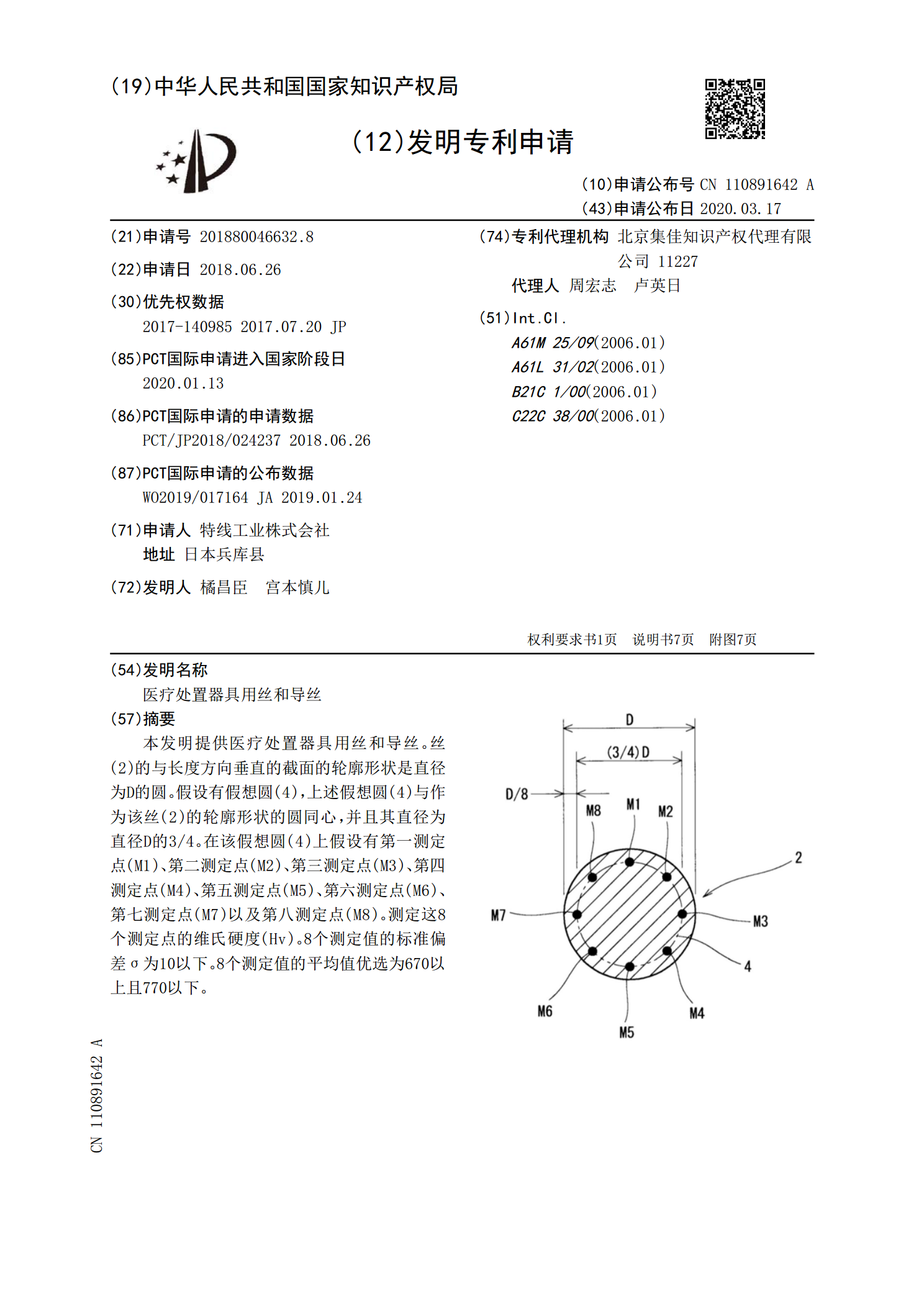
本发明提供医疗处置器具用丝和导丝。丝(2)的与长度方向垂直的截面的轮廓形状是直径为D的圆。假设有假想圆(4),上述假想圆(4)与作为该丝(2)的轮廓形状的圆同心,并且其直径为直径D的3/4。在该假想圆(4)上假设有第一测定点(M1)、第二测定点(M2)、第三测定点(M3)、第四测定点(M4)、第五测定点(M5)、第六测定点(M6)、第七测定点(M7)以及第八测定点(M8)。测定这8个测定点的维氏硬度(Hv)。8个测定值的标准偏差σ为10以下。8个测定值的平均值优选为670以上且770以下。

医疗用涂布器具.pdf
医疗用涂布器具(10)的喷嘴(16)具有送液部(46)和气体供给部件(50)。送液部(46)包含在第1管(58)的内侧配置有第2管(60)的双层管部(62),双层管部(62)从气体供给部件(50)的基端部朝向喷嘴(16)的基端侧延伸,送液部(46)具有:第1部分(47a),其与气体供给部件(50)的基端相比延伸至喷嘴(16)的前端侧;以及第2部分(47b),其与气体供给部件(50)的基端相比延伸至喷嘴(16)的基端侧。第2部分(47b)中的双层管部(62)比第1部分(47a)长。

处置工具、机械手和手术支持系统.pdf
一种处置工具,该处置工具的处置单元(40)利用从驱动源(21)生成的驱动力来进行操作,所述处置工具包括:驱动力传递构件(22,23),该驱动力传递构件连接到所述驱动源(21);连接部分(42),该连接部分形成在所述处置单元(40)中,并且连接到驱动线(23),该连接部分经由所述驱动力传递构件(22,23)供应有来自所述驱动源(21)的驱动力,并且将所述驱动力转换为所述处置单元(40)的移动;以及移动量检测构件(26),所述移动量检测构件被所述连接部分(42)移动。