
一种用于攀附光滑表面的吸盘履带驱动仿生装置.pdf

康平****ng

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于攀附光滑表面的吸盘履带驱动仿生装置.pdf
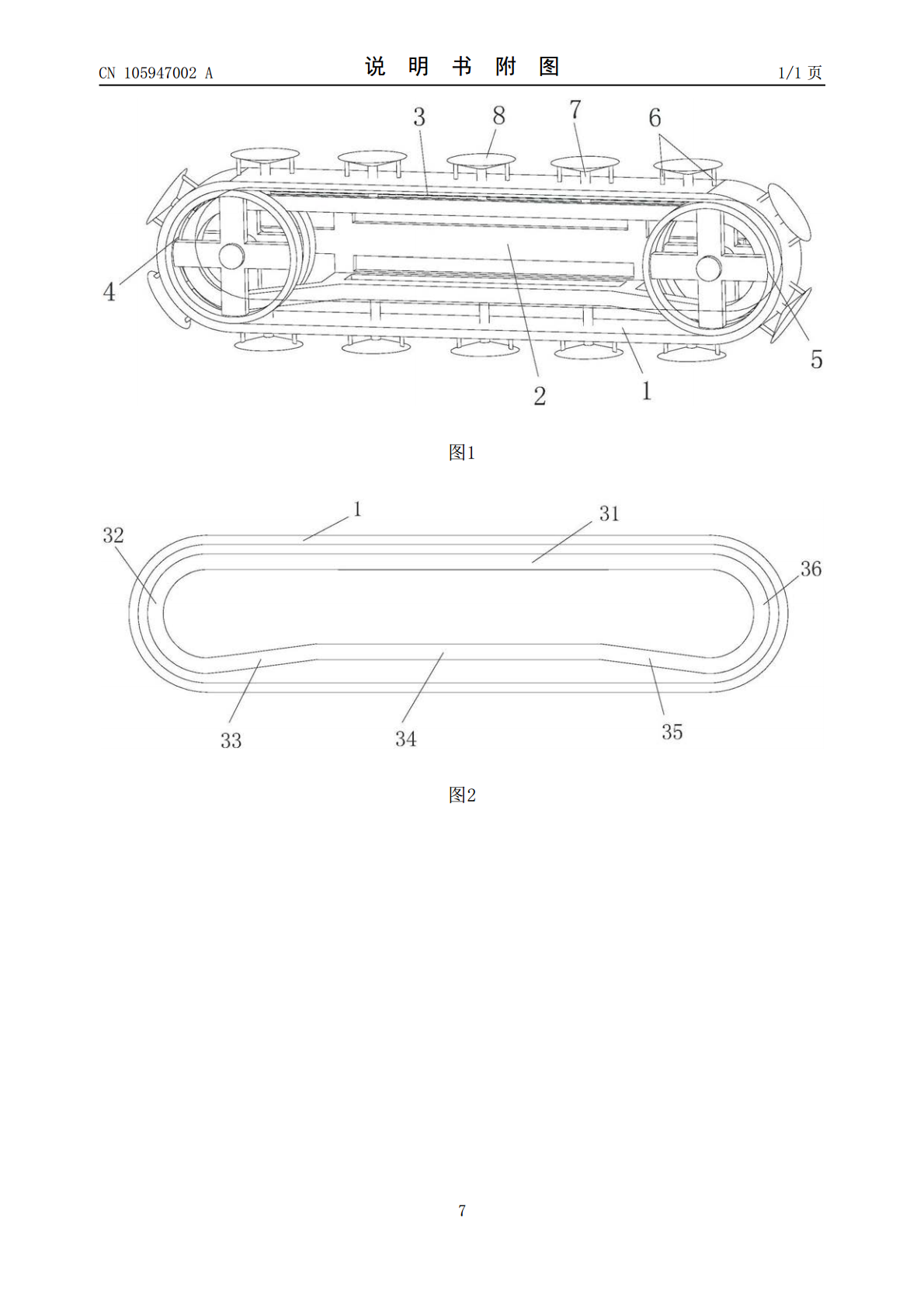
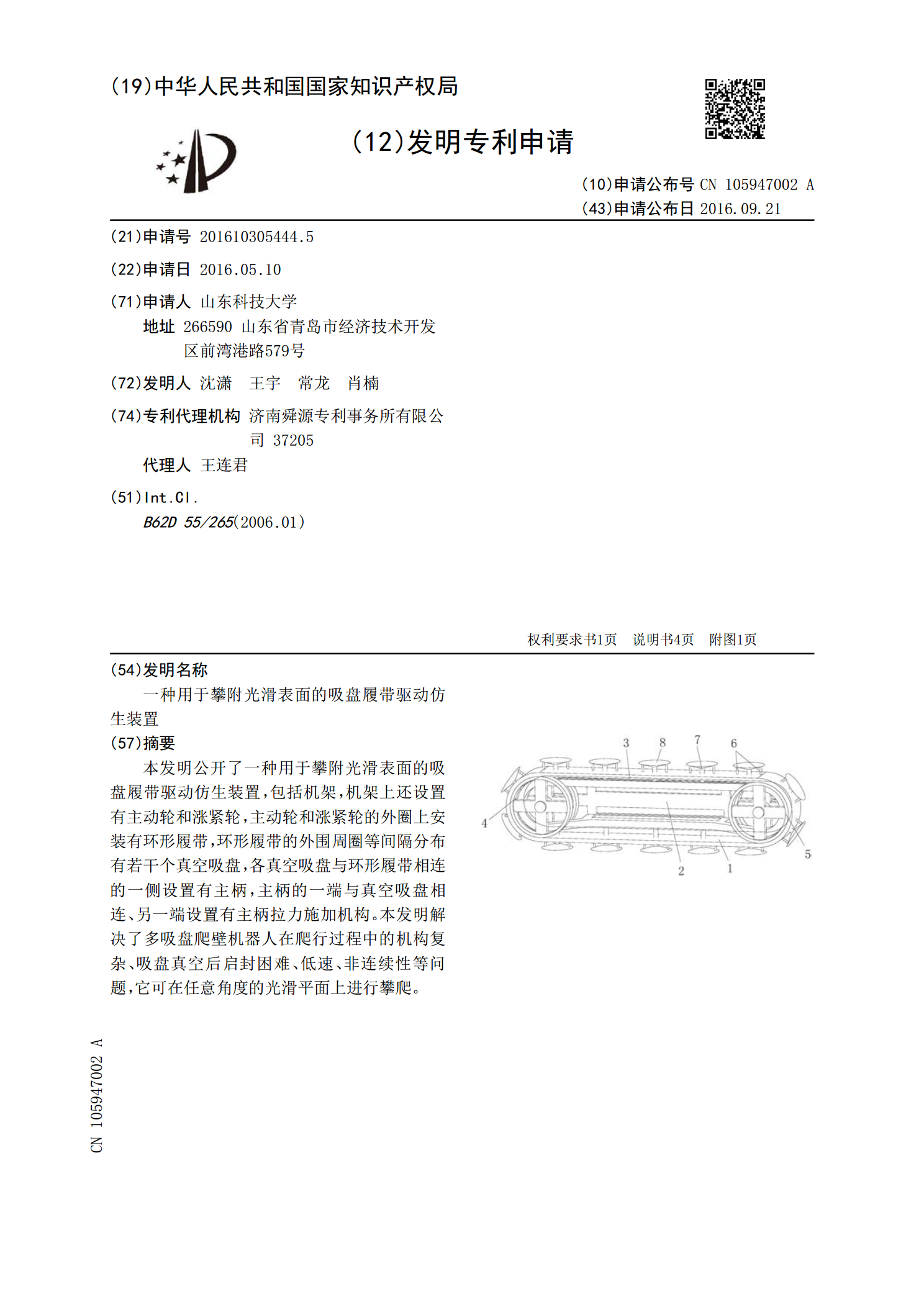
本发明公开了一种用于攀附光滑表面的吸盘履带驱动仿生装置,包括机架,机架上还设置有主动轮和涨紧轮,主动轮和涨紧轮的外圈上安装有环形履带,环形履带的外围周圈等间隔分布有若干个真空吸盘,各真空吸盘与环形履带相连的一侧设置有主柄,主柄的一端与真空吸盘相连、另一端设置有主柄拉力施加机构。本发明解决了多吸盘爬壁机器人在爬行过程中的机构复杂、吸盘真空后启封困难、低速、非连续性等问题,它可在任意角度的光滑平面上进行攀爬。
一种用于清洗装置的履带吸盘.pdf
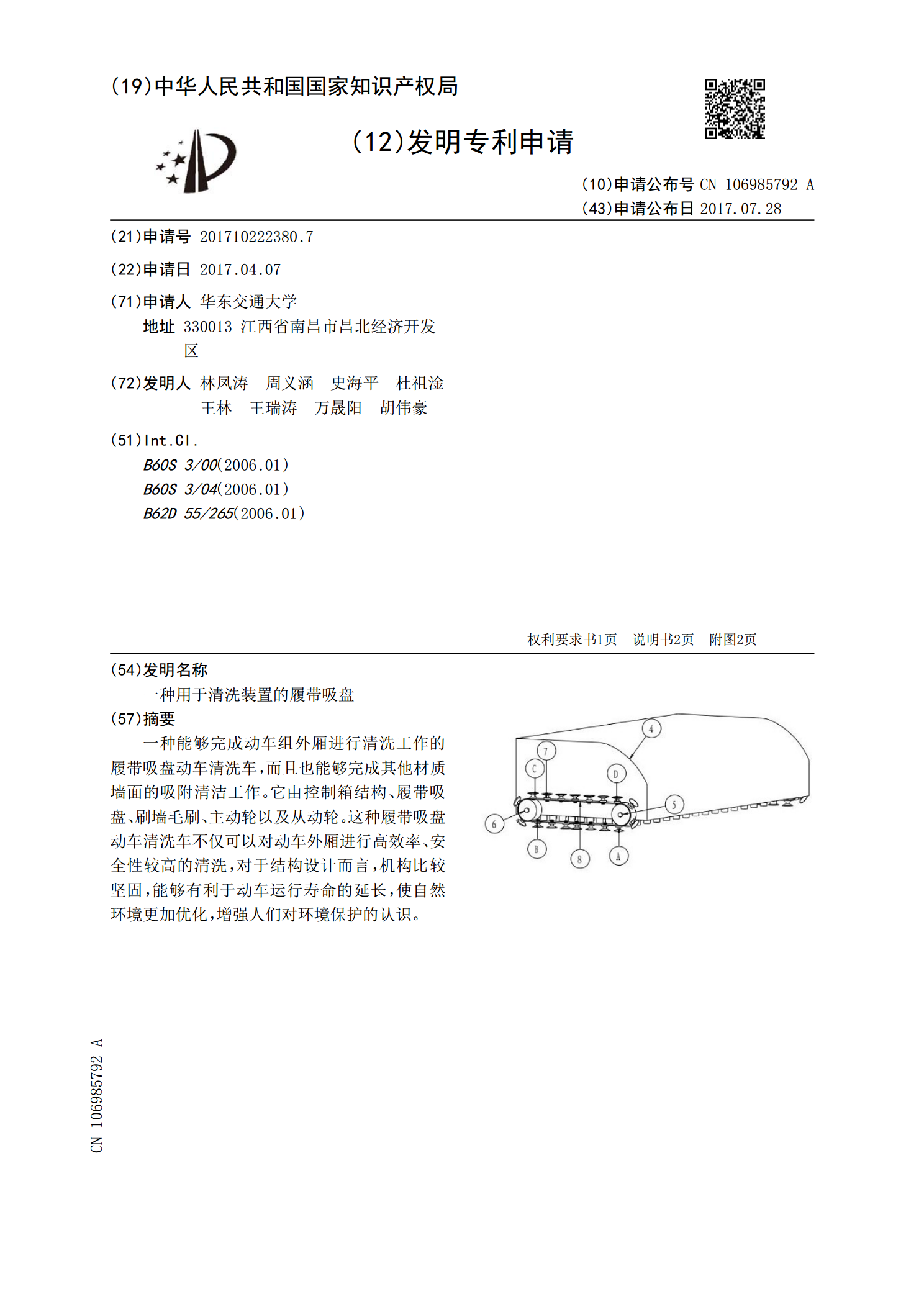
一种能够完成动车组外厢进行清洗工作的履带吸盘动车清洗车,而且也能够完成其他材质墙面的吸附清洁工作。它由控制箱结构、履带吸盘、刷墙毛刷、主动轮以及从动轮。这种履带吸盘动车清洗车不仅可以对动车外厢进行高效率、安全性较高的清洗,对于结构设计而言,机构比较坚固,能够有利于动车运行寿命的延长,使自然环境更加优化,增强人们对环境保护的认识。
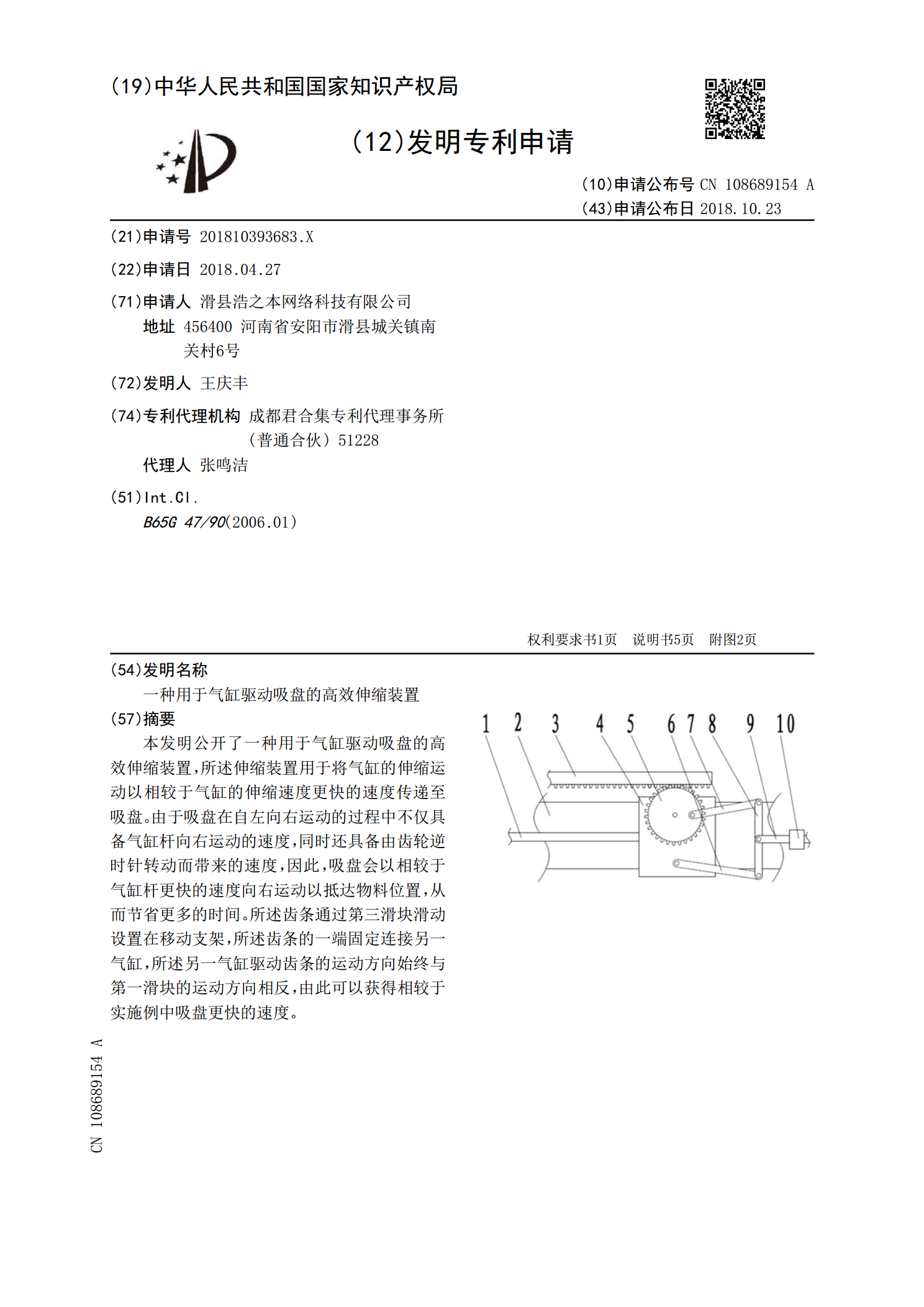
一种用于气缸驱动吸盘的高效伸缩装置.pdf
本发明公开了一种用于气缸驱动吸盘的高效伸缩装置,所述伸缩装置用于将气缸的伸缩运动以相较于气缸的伸缩速度更快的速度传递至吸盘。由于吸盘在自左向右运动的过程中不仅具备气缸杆向右运动的速度,同时还具备由齿轮逆时针转动而带来的速度,因此,吸盘会以相较于气缸杆更快的速度向右运动以抵达物料位置,从而节省更多的时间。所述齿条通过第三滑块滑动设置在移动支架,所述齿条的一端固定连接另一气缸,所述另一气缸驱动齿条的运动方向始终与第一滑块的运动方向相反,由此可以获得相较于实施例中吸盘更快的速度。
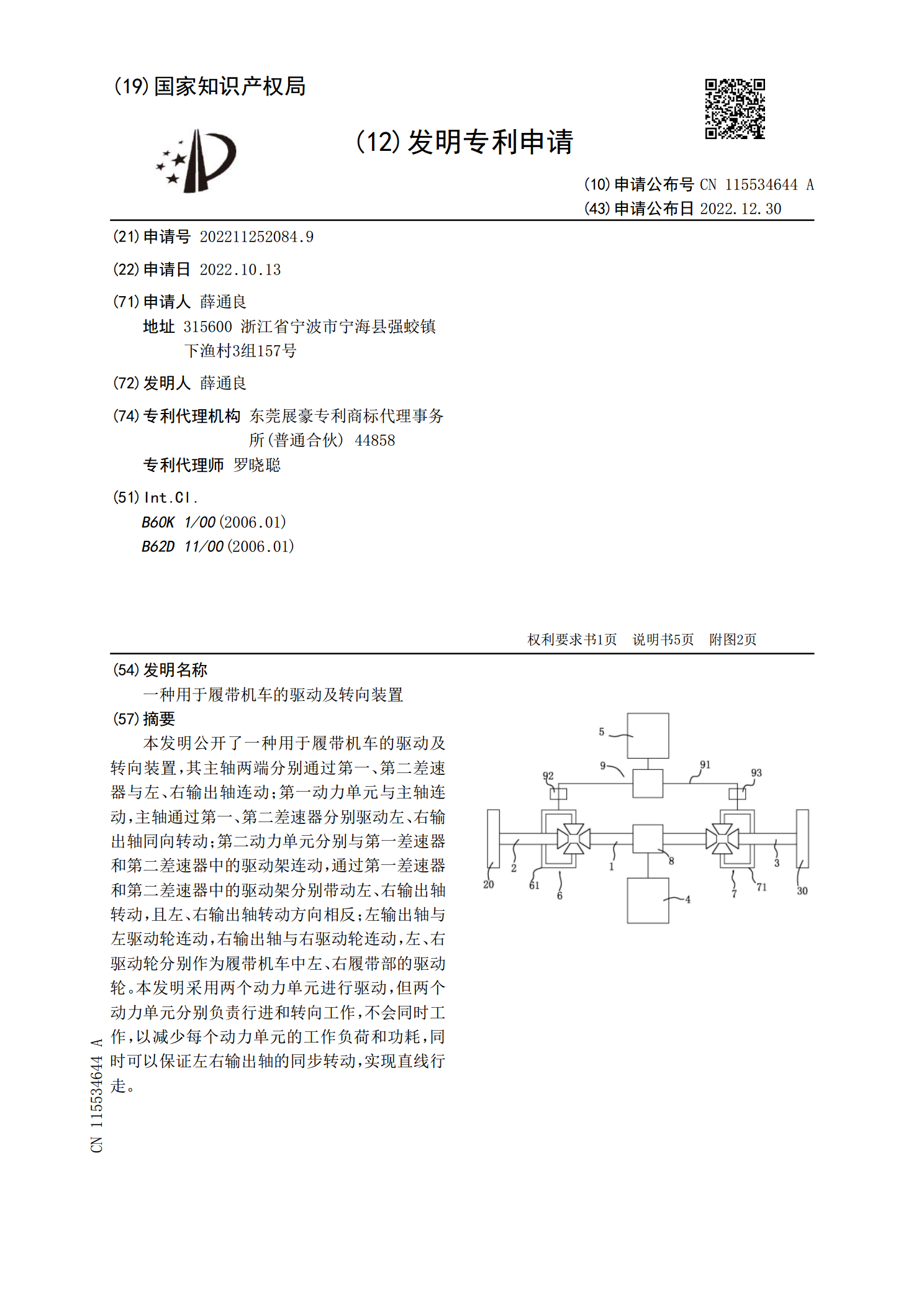
一种用于履带机车的驱动及转向装置.pdf
本发明公开了一种用于履带机车的驱动及转向装置,其主轴两端分别通过第一、第二差速器与左、右输出轴连动;第一动力单元与主轴连动,主轴通过第一、第二差速器分别驱动左、右输出轴同向转动;第二动力单元分别与第一差速器和第二差速器中的驱动架连动,通过第一差速器和第二差速器中的驱动架分别带动左、右输出轴转动,且左、右输出轴转动方向相反;左输出轴与左驱动轮连动,右输出轴与右驱动轮连动,左、右驱动轮分别作为履带机车中左、右履带部的驱动轮。本发明采用两个动力单元进行驱动,但两个动力单元分别负责行进和转向工作,不会同时工作,以
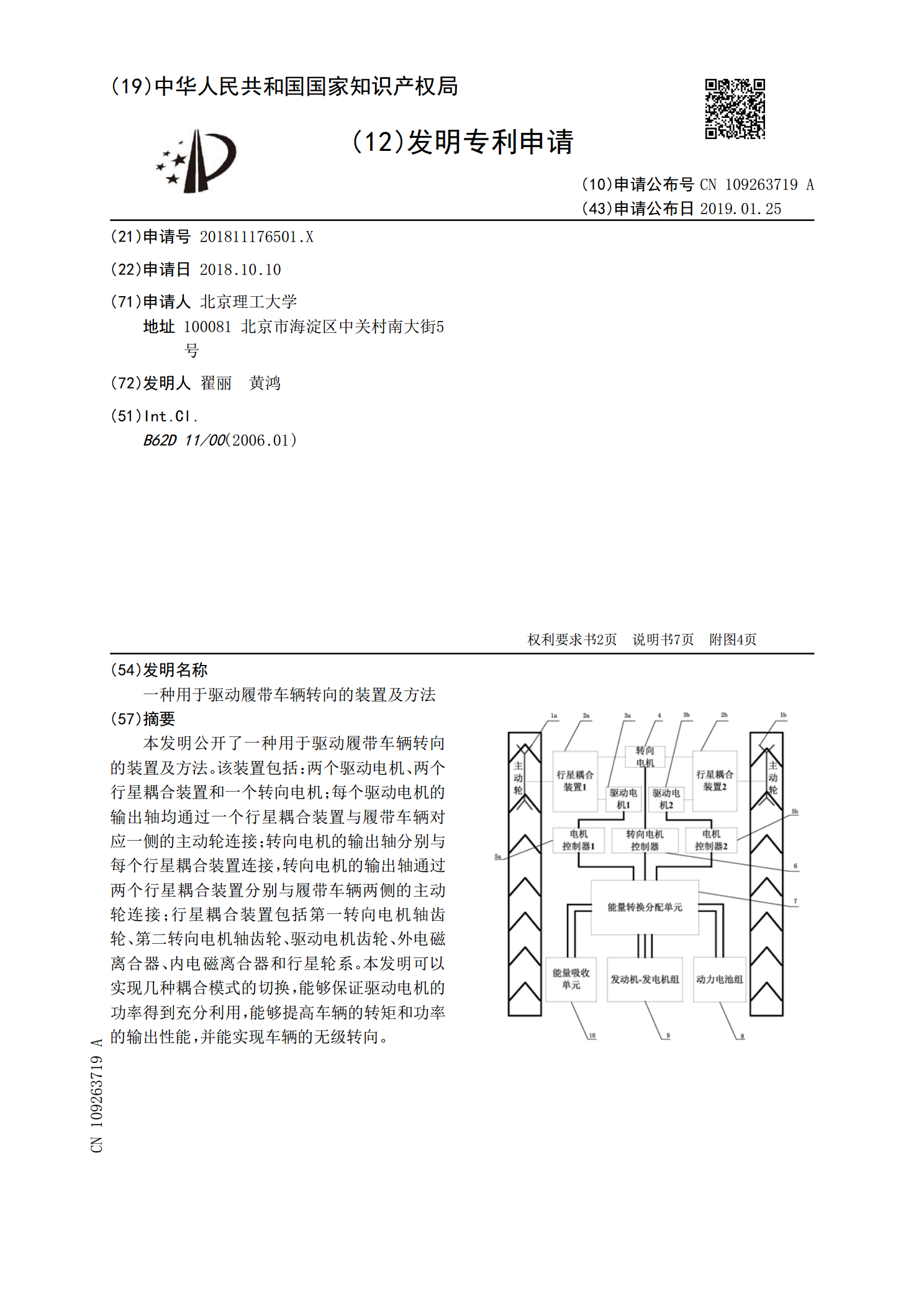
一种用于驱动履带车辆转向的装置及方法.pdf
本发明公开了一种用于驱动履带车辆转向的装置及方法。该装置包括:两个驱动电机、两个行星耦合装置和一个转向电机;每个驱动电机的输出轴均通过一个行星耦合装置与履带车辆对应一侧的主动轮连接;转向电机的输出轴分别与每个行星耦合装置连接,转向电机的输出轴通过两个行星耦合装置分别与履带车辆两侧的主动轮连接;行星耦合装置包括第一转向电机轴齿轮、第二转向电机轴齿轮、驱动电机齿轮、外电磁离合器、内电磁离合器和行星轮系。本发明可以实现几种耦合模式的切换,能够保证驱动电机的功率得到充分利用,能够提高车辆的转矩和功率的输出性能,并