
一种双向旋转AGV小车的驱动装置.pdf

含秀****66


1/7

2/7

3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双向旋转AGV小车的驱动装置.pdf
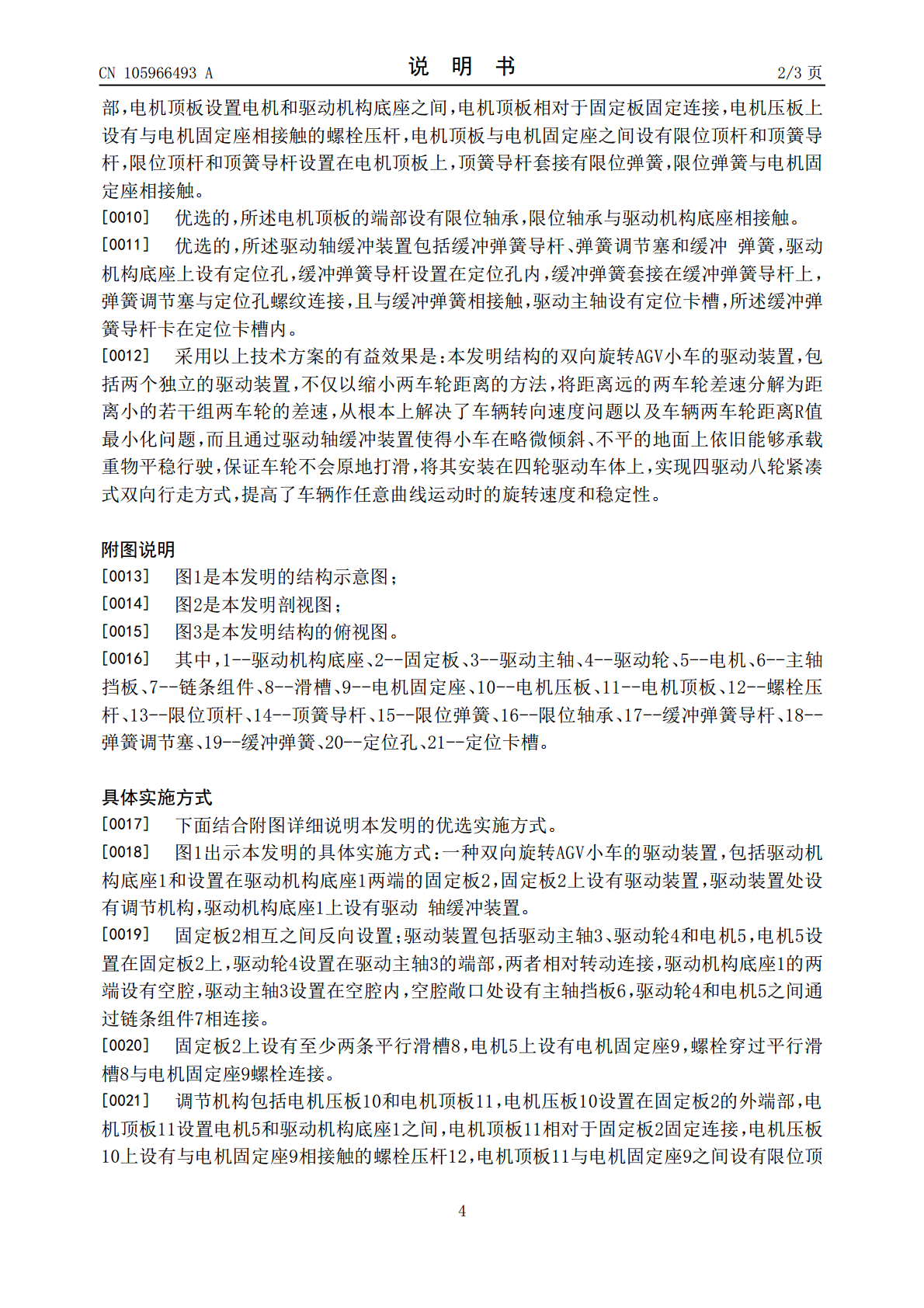
本发明公开了一种双向旋转驱动机构,包括驱动机构底座和设置在驱动机构底座两端的固定板,固定板上设有驱动装置,所述驱动装置处设有调节机构,所述驱动机构底座上设有驱动轴缓冲装置,本发明结构的双向旋转驱动机构,包括两个独立的驱动装置,不仅以缩小两车轮距离的方法,将距离远的两车轮差速分解为距离小的若干组两车轮的差速,从根本上解决了车辆转向速度问题以及车辆两车轮距离R值最小化问题。
单驱双向AGV驱动装置、AGV和AGV系统.pdf
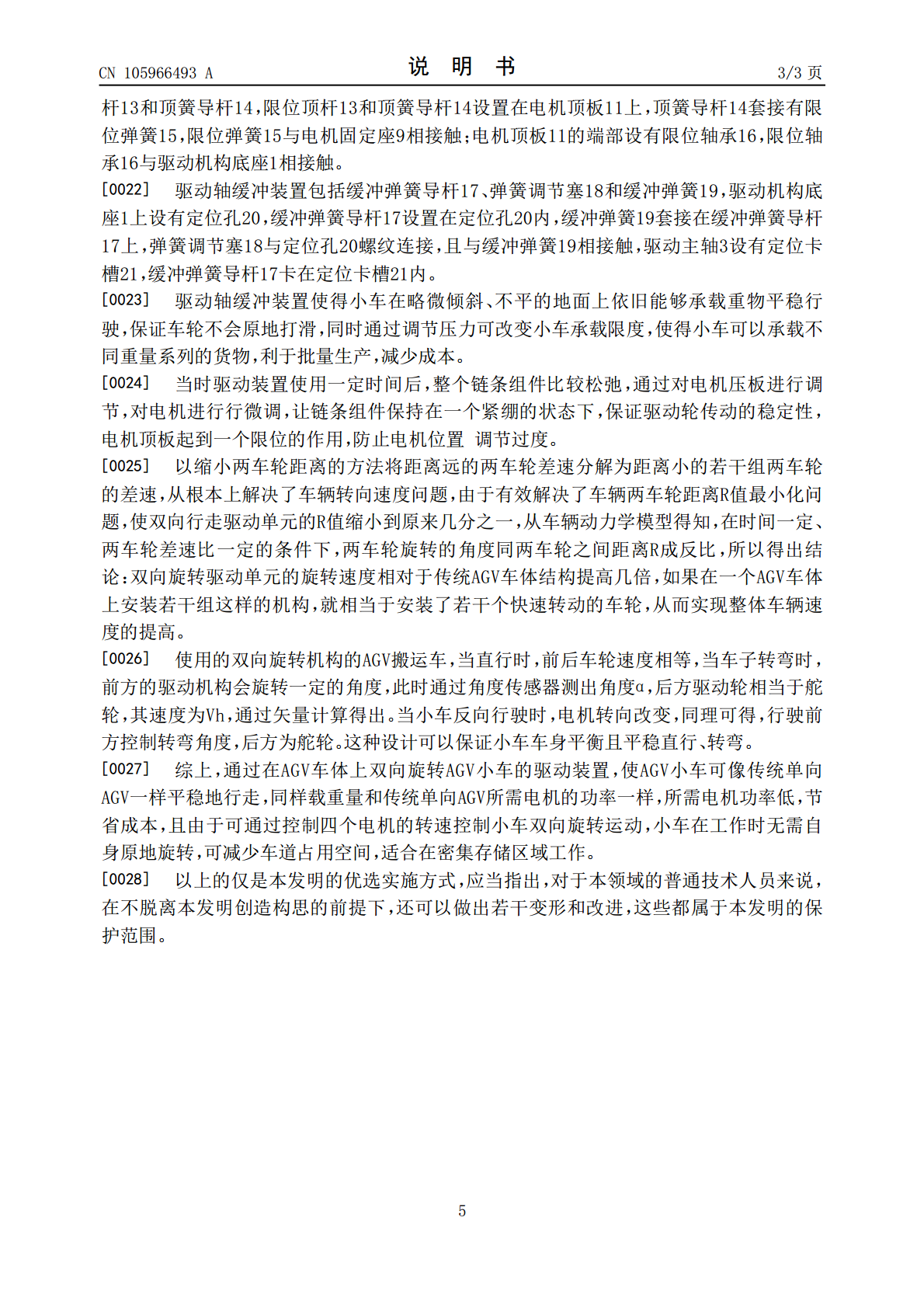
本发明公开了一种单驱双向AGV驱动装置、AGV和AGV系统,该单驱双向AGV驱动装置包括一驱动安装板,其设置于AGV车架上;一电机安装板,其设置于驱动安装板下方;一驱动轮,其设置于电机安装板上,并位于电机安装板外侧;一悬架组件,其设置于驱动安装板与电机安装板之间,使得驱动轮经过不平路面时上下浮动,缓和由不平路面传给所述AGV车架的冲击。本发明结构简单可靠,实用性强。
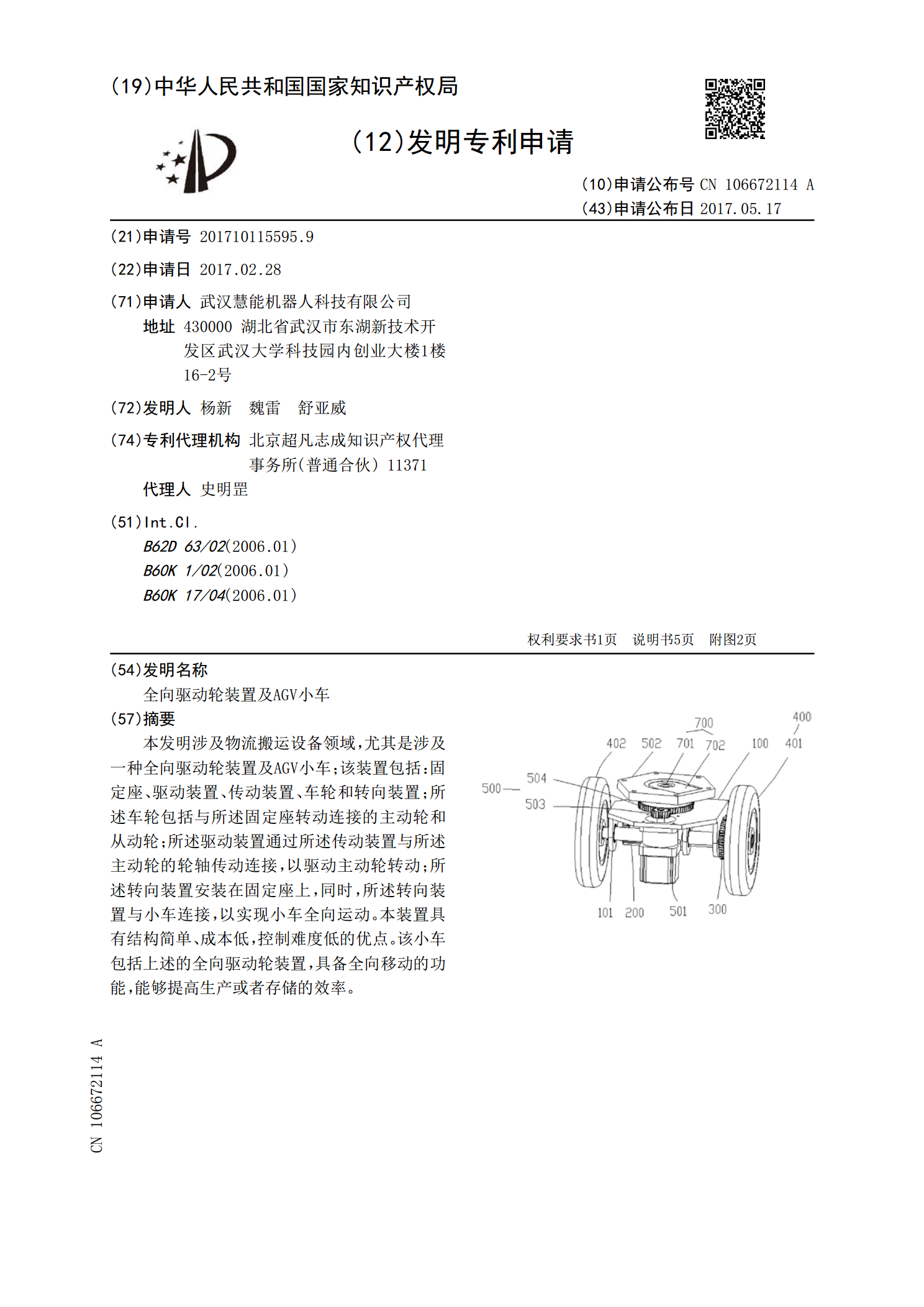
全向驱动轮装置及AGV小车.pdf
本发明涉及物流搬运设备领域,尤其是涉及一种全向驱动轮装置及AGV小车;该装置包括:固定座、驱动装置、传动装置、车轮和转向装置;所述车轮包括与所述固定座转动连接的主动轮和从动轮;所述驱动装置通过所述传动装置与所述主动轮的轮轴传动连接,以驱动主动轮转动;所述转向装置安装在固定座上,同时,所述转向装置与小车连接,以实现小车全向运动。本装置具有结构简单、成本低,控制难度低的优点。该小车包括上述的全向驱动轮装置,具备全向移动的功能,能够提高生产或者存储的效率。
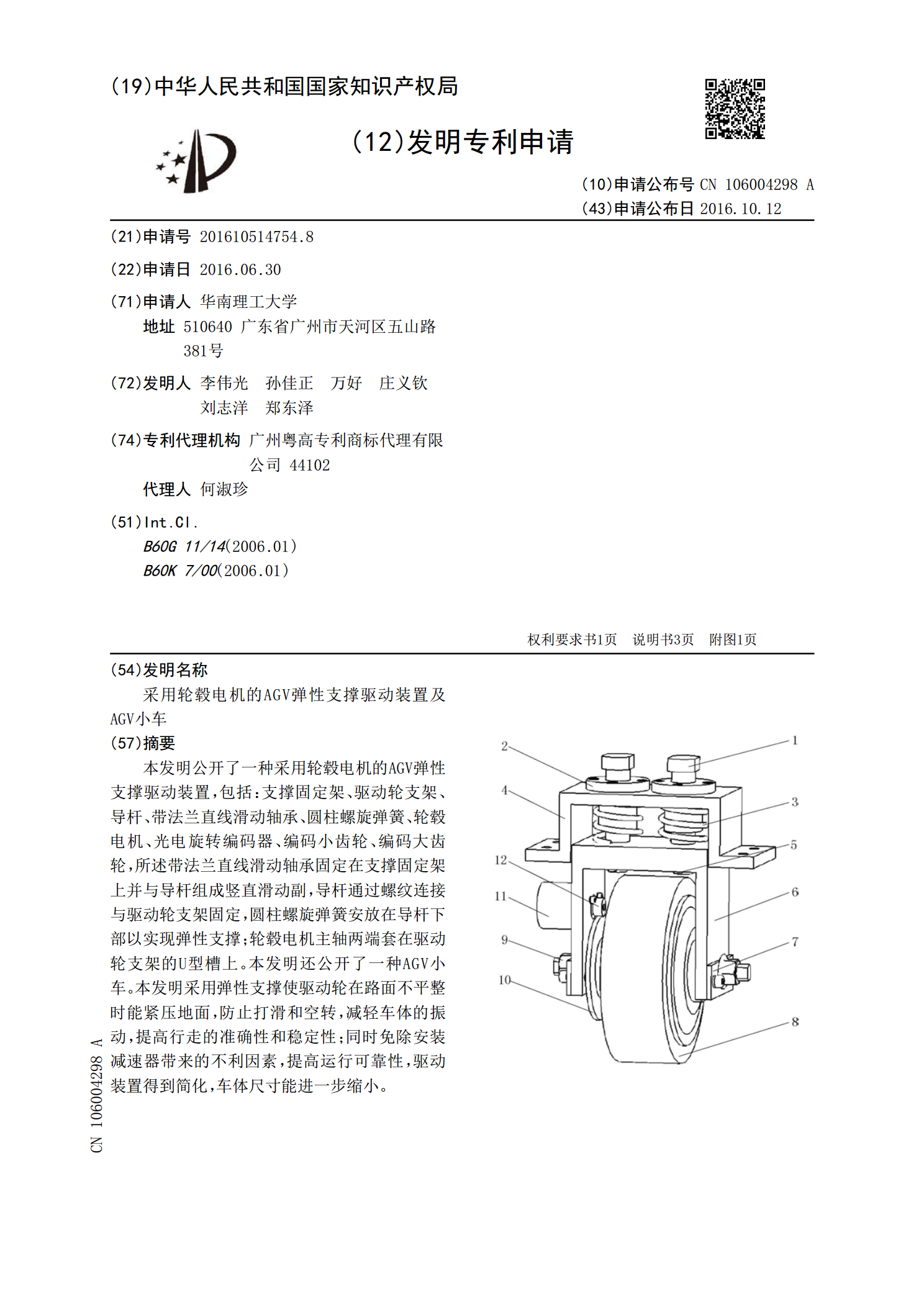
采用轮毂电机的AGV弹性支撑驱动装置及AGV小车.pdf
本发明公开了一种采用轮毂电机的AGV弹性支撑驱动装置,包括:支撑固定架、驱动轮支架、导杆、带法兰直线滑动轴承、圆柱螺旋弹簧、轮毂电机、光电旋转编码器、编码小齿轮、编码大齿轮,所述带法兰直线滑动轴承固定在支撑固定架上并与导杆组成竖直滑动副,导杆通过螺纹连接与驱动轮支架固定,圆柱螺旋弹簧安放在导杆下部以实现弹性支撑;轮毂电机主轴两端套在驱动轮支架的U型槽上。本发明还公开了一种AGV小车。本发明采用弹性支撑使驱动轮在路面不平整时能紧压地面,防止打滑和空转,减轻车体的振动,提高行走的准确性和稳定性;同时免除安装减
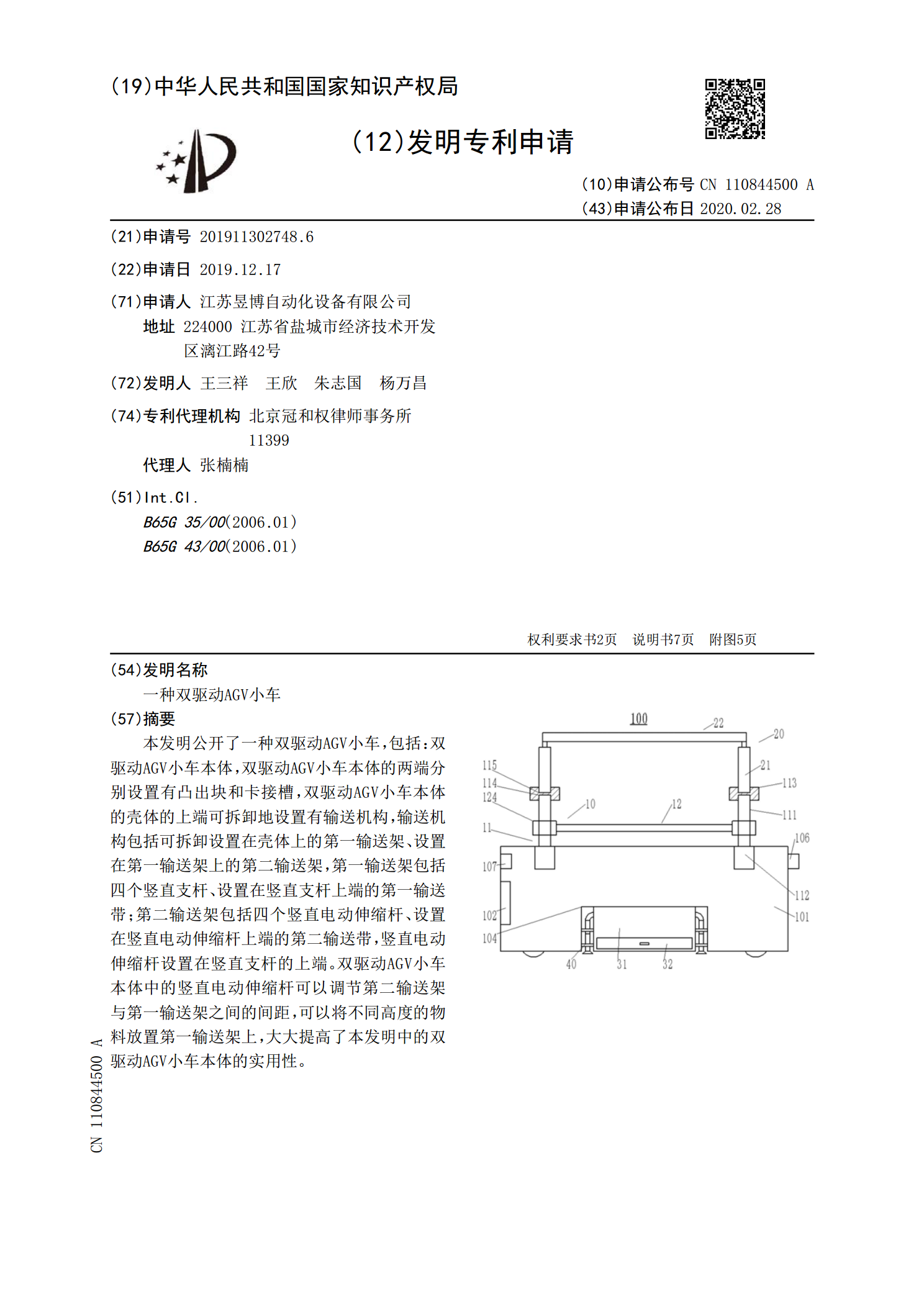
一种双驱动AGV小车.pdf
本发明公开了一种双驱动AGV小车,包括:双驱动AGV小车本体,双驱动AGV小车本体的两端分别设置有凸出块和卡接槽,双驱动AGV小车本体的壳体的上端可拆卸地设置有输送机构,输送机构包括可拆卸设置在壳体上的第一输送架、设置在第一输送架上的第二输送架,第一输送架包括四个竖直支杆、设置在竖直支杆上端的第一输送带;第二输送架包括四个竖直电动伸缩杆、设置在竖直电动伸缩杆上端的第二输送带,竖直电动伸缩杆设置在竖直支杆的上端。双驱动AGV小车本体中的竖直电动伸缩杆可以调节第二输送架与第一输送架之间的间距,可以将不同高度的