
一种单驱全向式AGV车体装置.pdf

思洁****爱吗

1/6
2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单驱全向式AGV车体装置.pdf
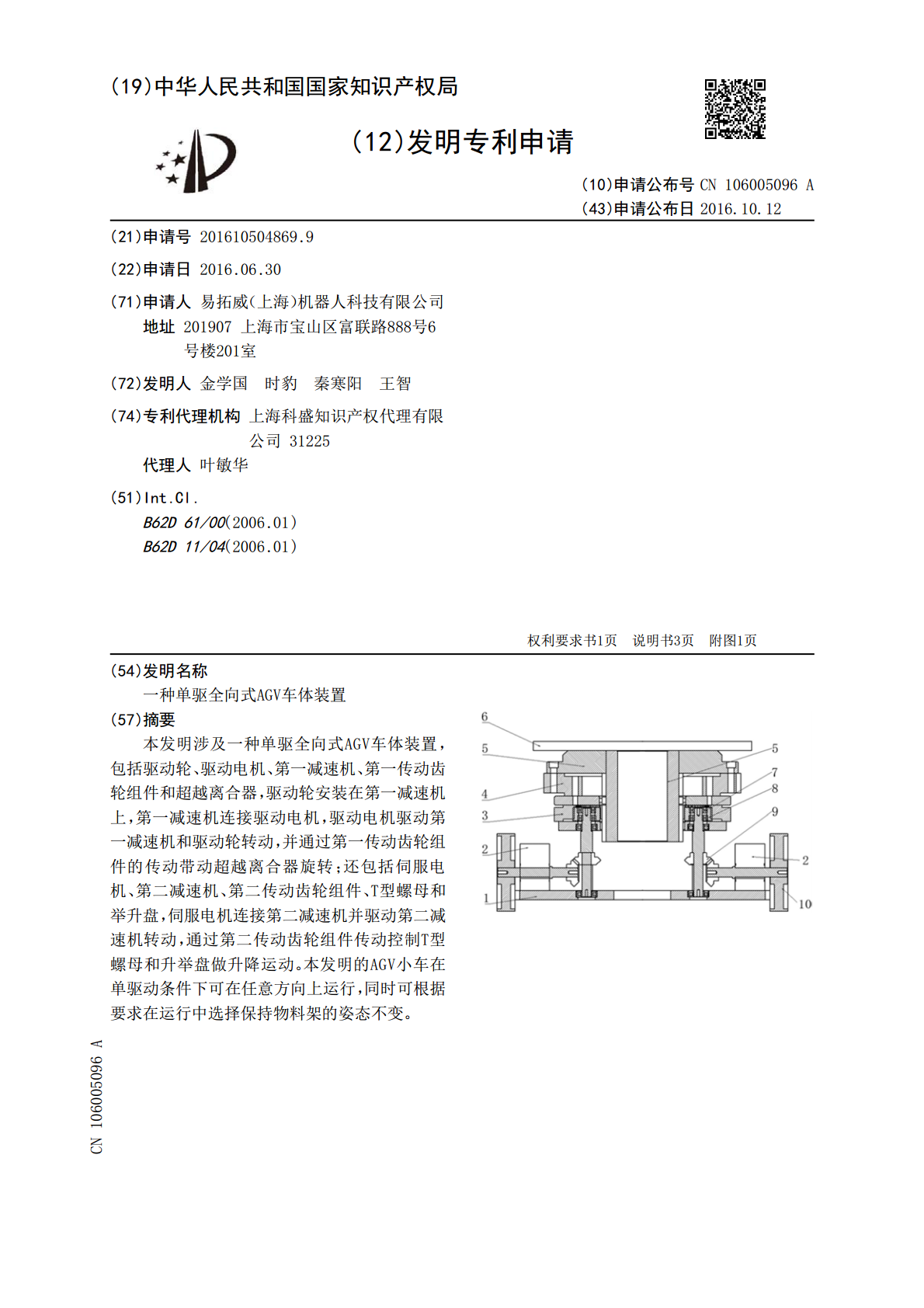
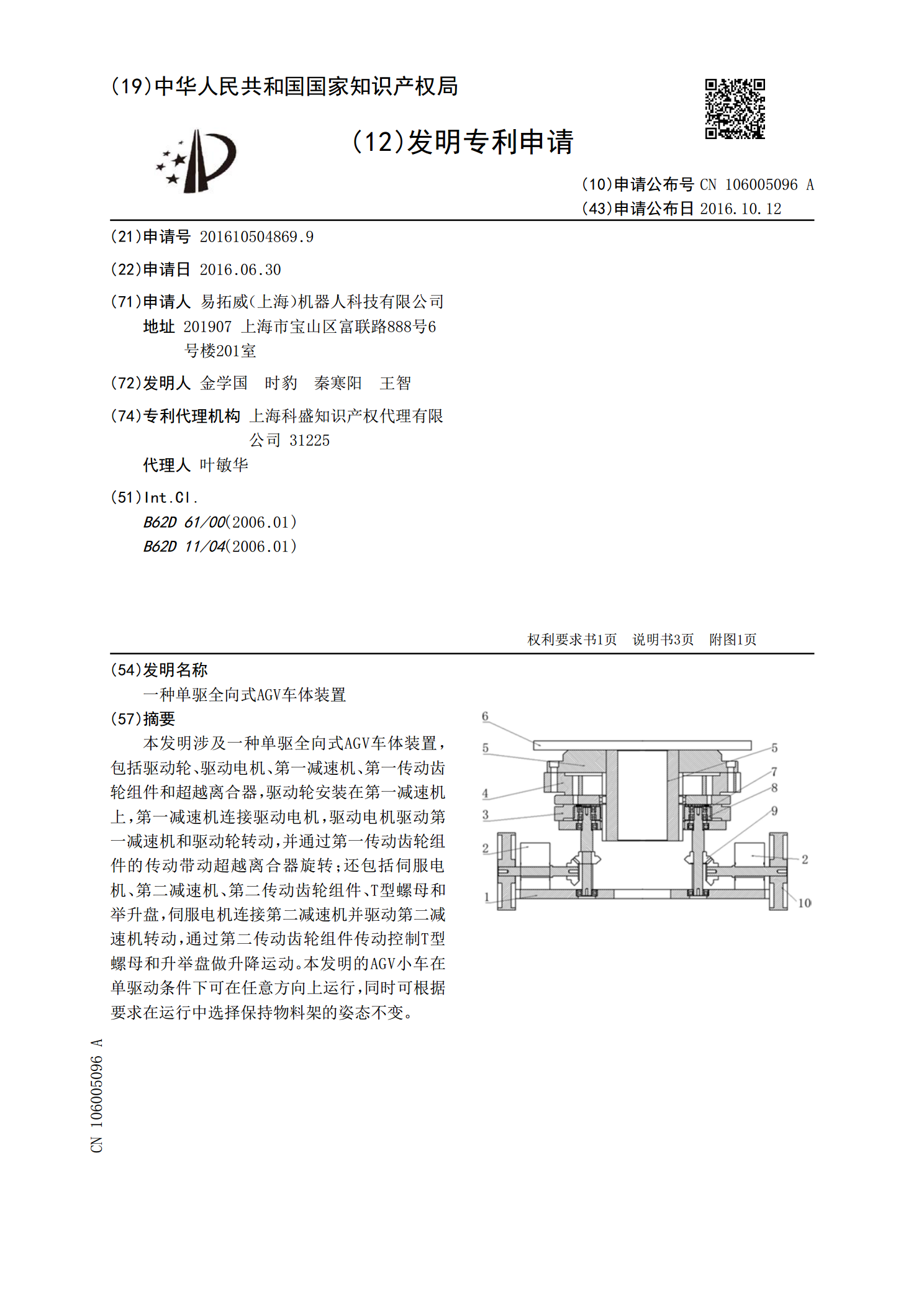
本发明涉及一种单驱全向式AGV车体装置,包括驱动轮、驱动电机、第一减速机、第一传动齿轮组件和超越离合器,驱动轮安装在第一减速机上,第一减速机连接驱动电机,驱动电机驱动第一减速机和驱动轮转动,并通过第一传动齿轮组件的传动带动超越离合器旋转;还包括伺服电机、第二减速机、第二传动齿轮组件、T型螺母和举升盘,伺服电机连接第二减速机并驱动第二减速机转动,通过第二传动齿轮组件传动控制T型螺母和升举盘做升降运动。本发明的AGV小车在单驱动条件下可在任意方向上运行,同时可根据要求在运行中选择保持物料架的姿态不变。
单驱双向AGV驱动装置、AGV和AGV系统.pdf
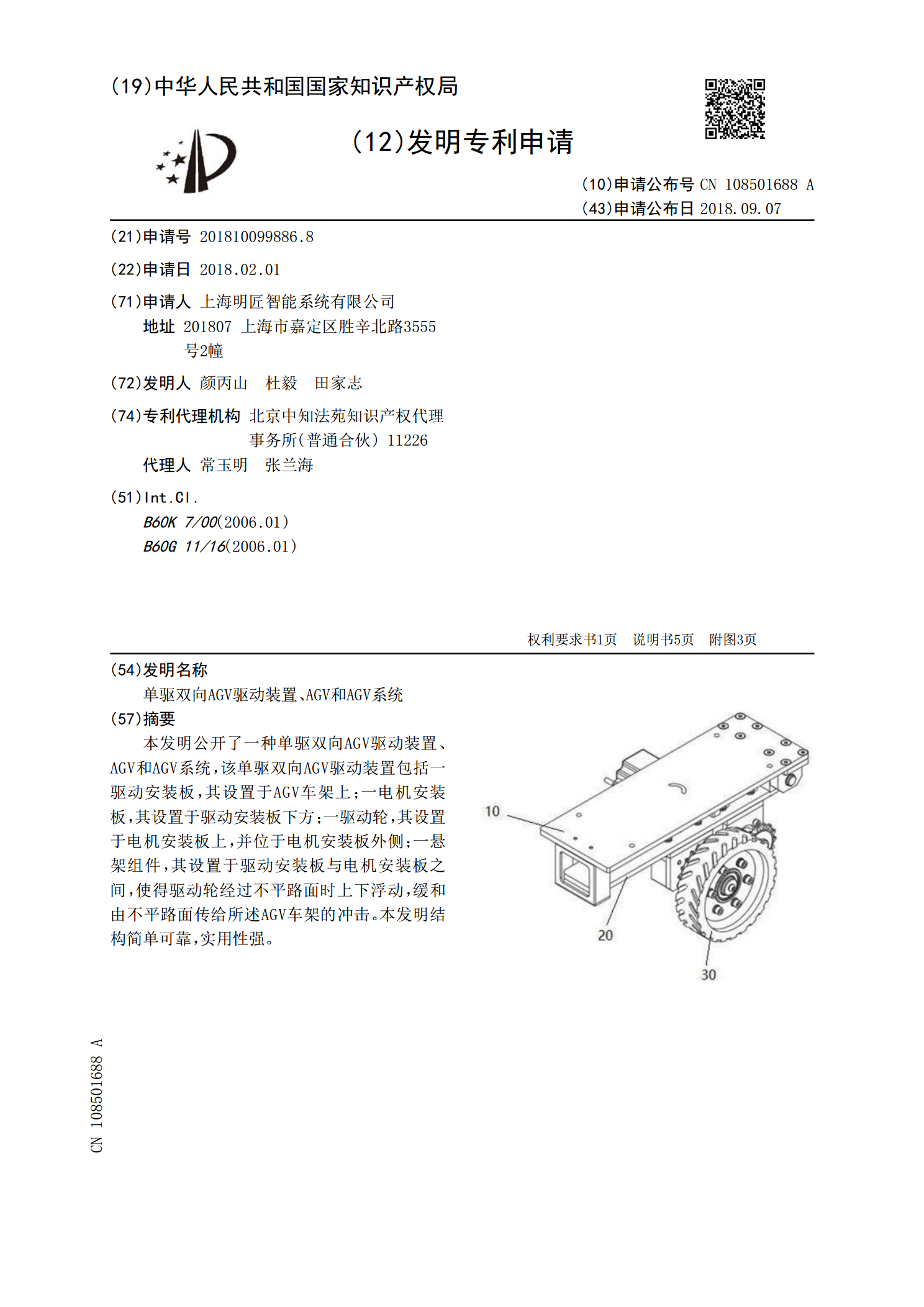
本发明公开了一种单驱双向AGV驱动装置、AGV和AGV系统,该单驱双向AGV驱动装置包括一驱动安装板,其设置于AGV车架上;一电机安装板,其设置于驱动安装板下方;一驱动轮,其设置于电机安装板上,并位于电机安装板外侧;一悬架组件,其设置于驱动安装板与电机安装板之间,使得驱动轮经过不平路面时上下浮动,缓和由不平路面传给所述AGV车架的冲击。本发明结构简单可靠,实用性强。
全向多轴重载AGV小车的车体结构.pdf
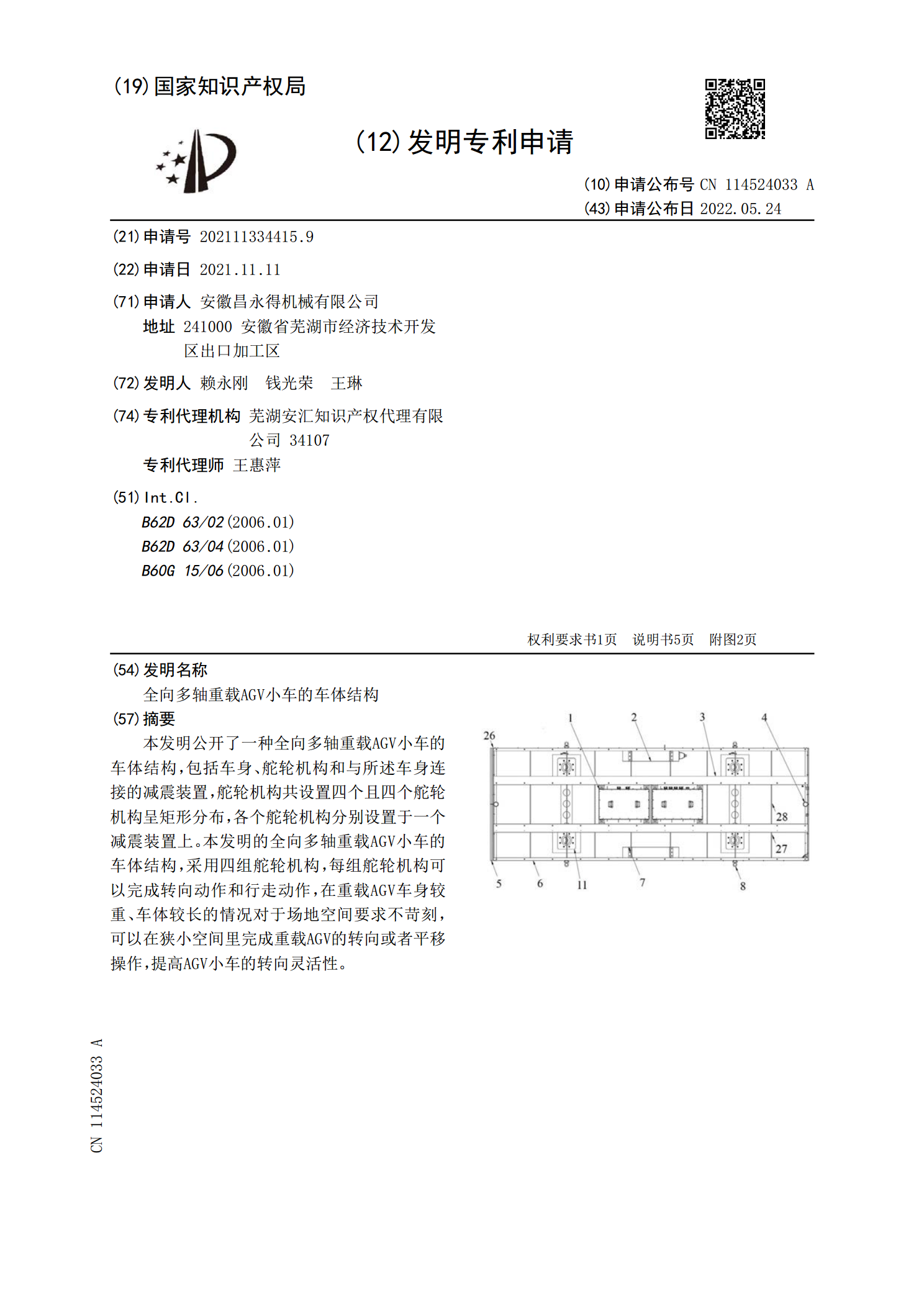
本发明公开了一种全向多轴重载AGV小车的车体结构,包括车身、舵轮机构和与所述车身连接的减震装置,舵轮机构共设置四个且四个舵轮机构呈矩形分布,各个舵轮机构分别设置于一个减震装置上。本发明的全向多轴重载AGV小车的车体结构,采用四组舵轮机构,每组舵轮机构可以完成转向动作和行走动作,在重载AGV车身较重、车体较长的情况对于场地空间要求不苛刻,可以在狭小空间里完成重载AGV的转向或者平移操作,提高AGV小车的转向灵活性。

全向潜伏式AGV.pdf
本发明揭示了一种全向潜伏式AGV,包括机器人本体、举升单元、驱动转向单元、定位导航与控制单元和电源单元,其中举升单元设于机器人本体的内部且设有外露于顶侧的托板,托板受控对所承载的货架举升、回转;驱动转向单元设于机器人本体的内部且设有外露于底侧的驱动轮,驱动轮受控等速直行、差速转向运行;定位导航与控制单元在机器人本体内部分别与前述两单元电性连接,接收指令、导航信息并发送驱动、控制信号;电源单元则用于相接各单元间的供能。应用该全向潜伏式AGV,能提高电商配送中心拣选效率,实现从货物到人的自动化;使用灵活,极具
一种全向潜伏式的AGV小车.pdf
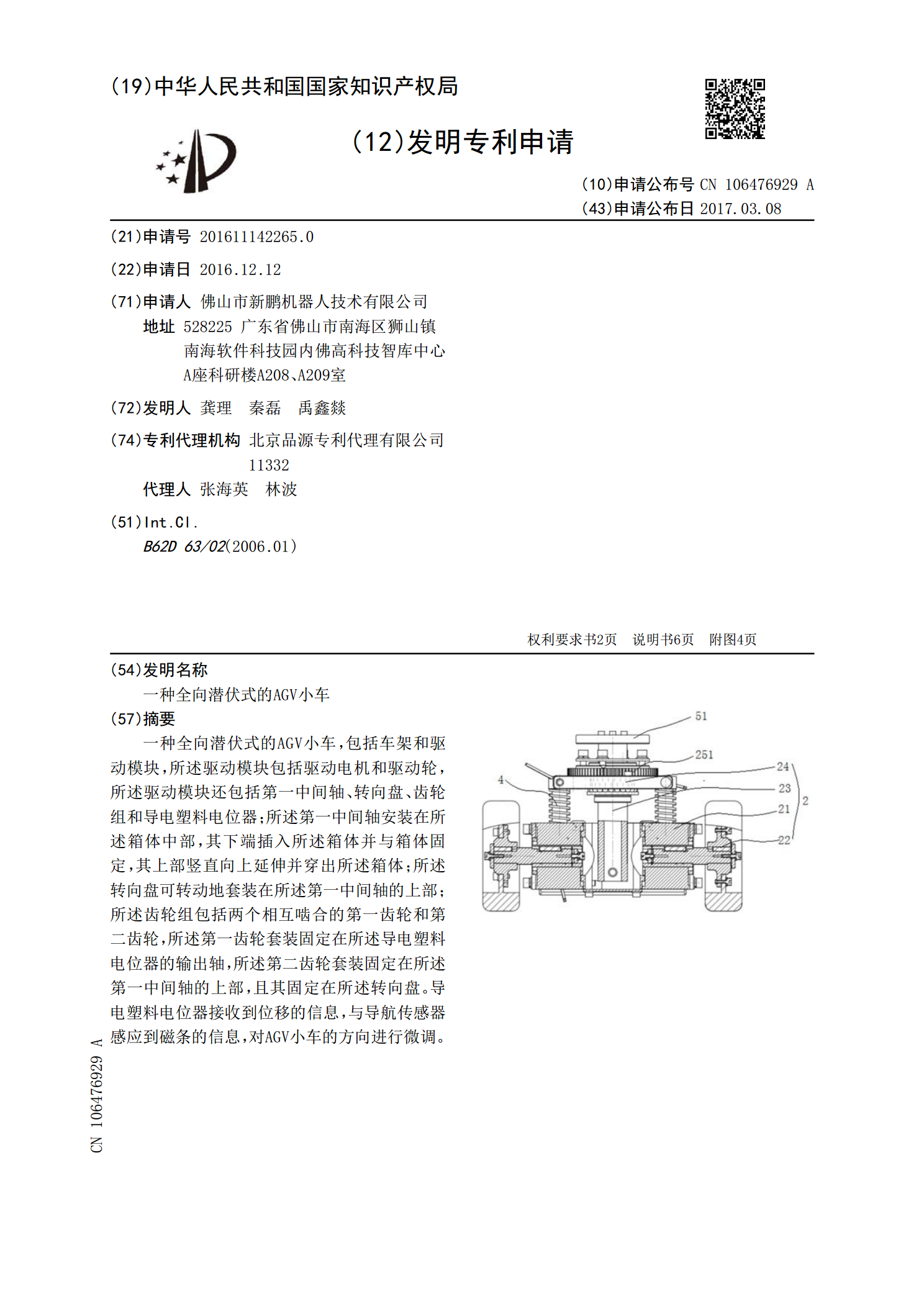
一种全向潜伏式的AGV小车,包括车架和驱动模块,所述驱动模块包括驱动电机和驱动轮,所述驱动模块还包括第一中间轴、转向盘、齿轮组和导电塑料电位器;所述第一中间轴安装在所述箱体中部,其下端插入所述箱体并与箱体固定,其上部竖直向上延伸并穿出所述箱体;所述转向盘可转动地套装在所述第一中间轴的上部;所述齿轮组包括两个相互啮合的第一齿轮和第二齿轮,所述第一齿轮套装固定在所述导电塑料电位器的输出轴,所述第二齿轮套装固定在所述第一中间轴的上部,且其固定在所述转向盘。导电塑料电位器接收到位移的信息,与导航传感器感应到磁条的