
一种自适应巡航系统及控制方法.pdf

小新****ou


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自适应巡航系统及控制方法.pdf
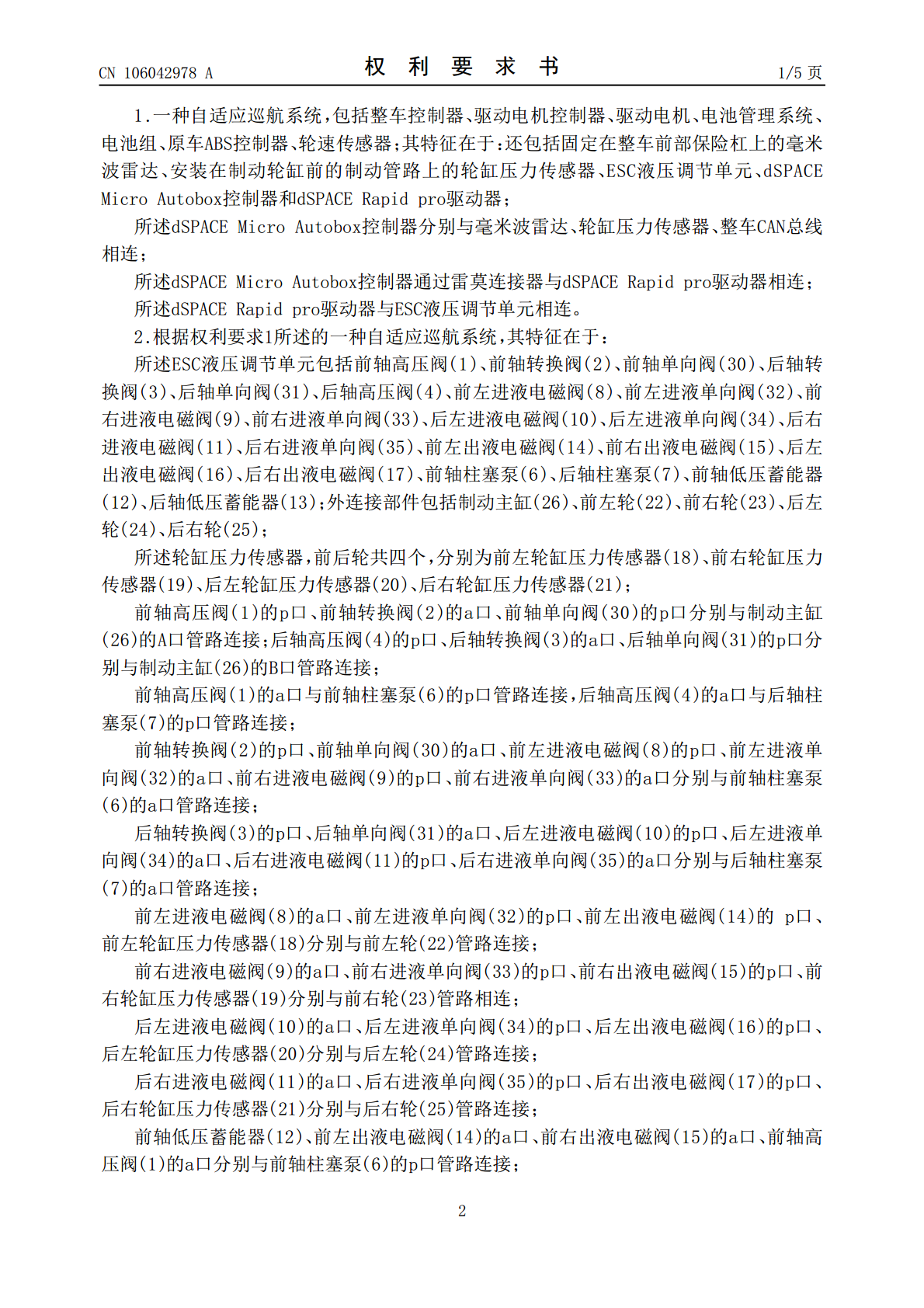
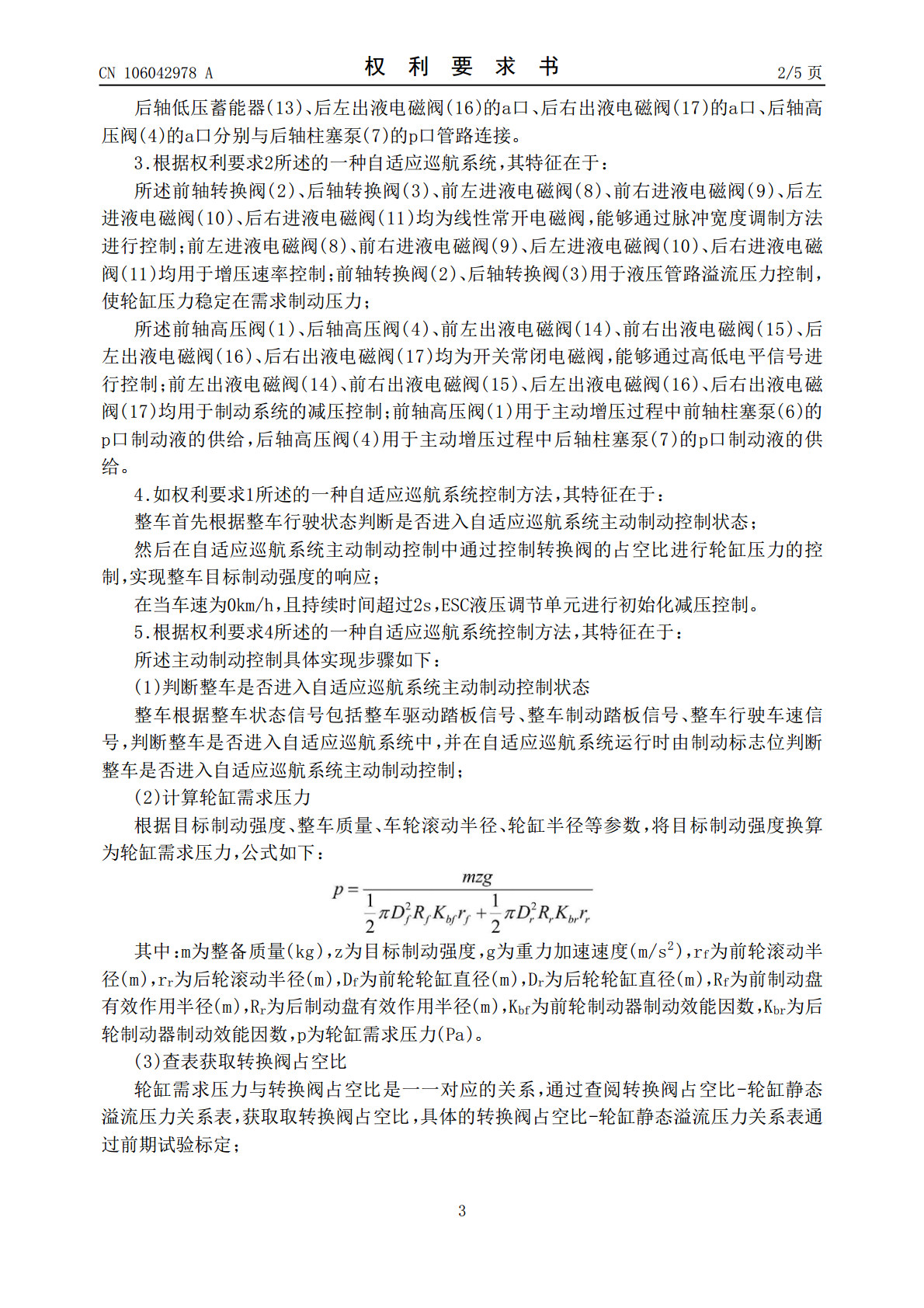
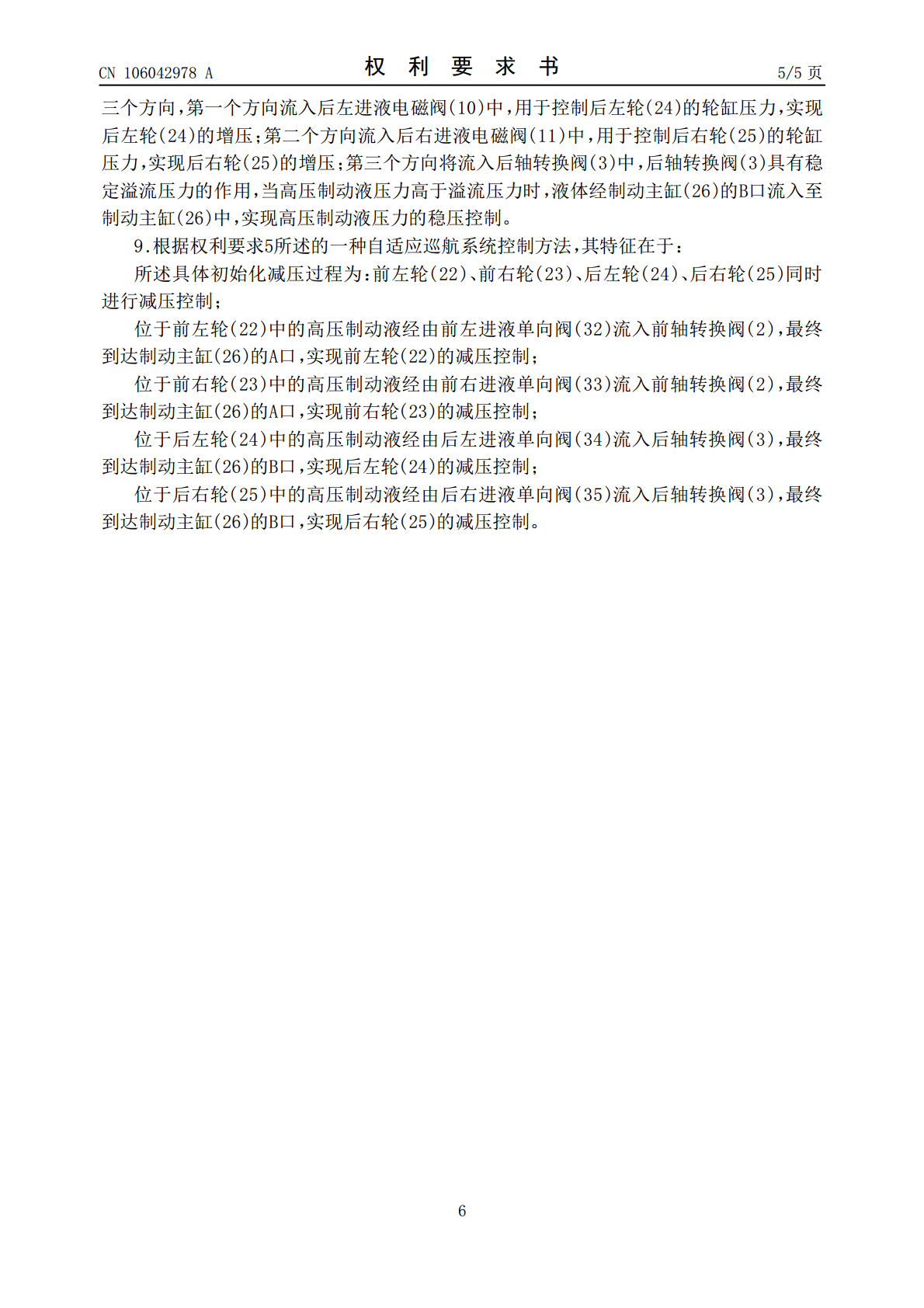
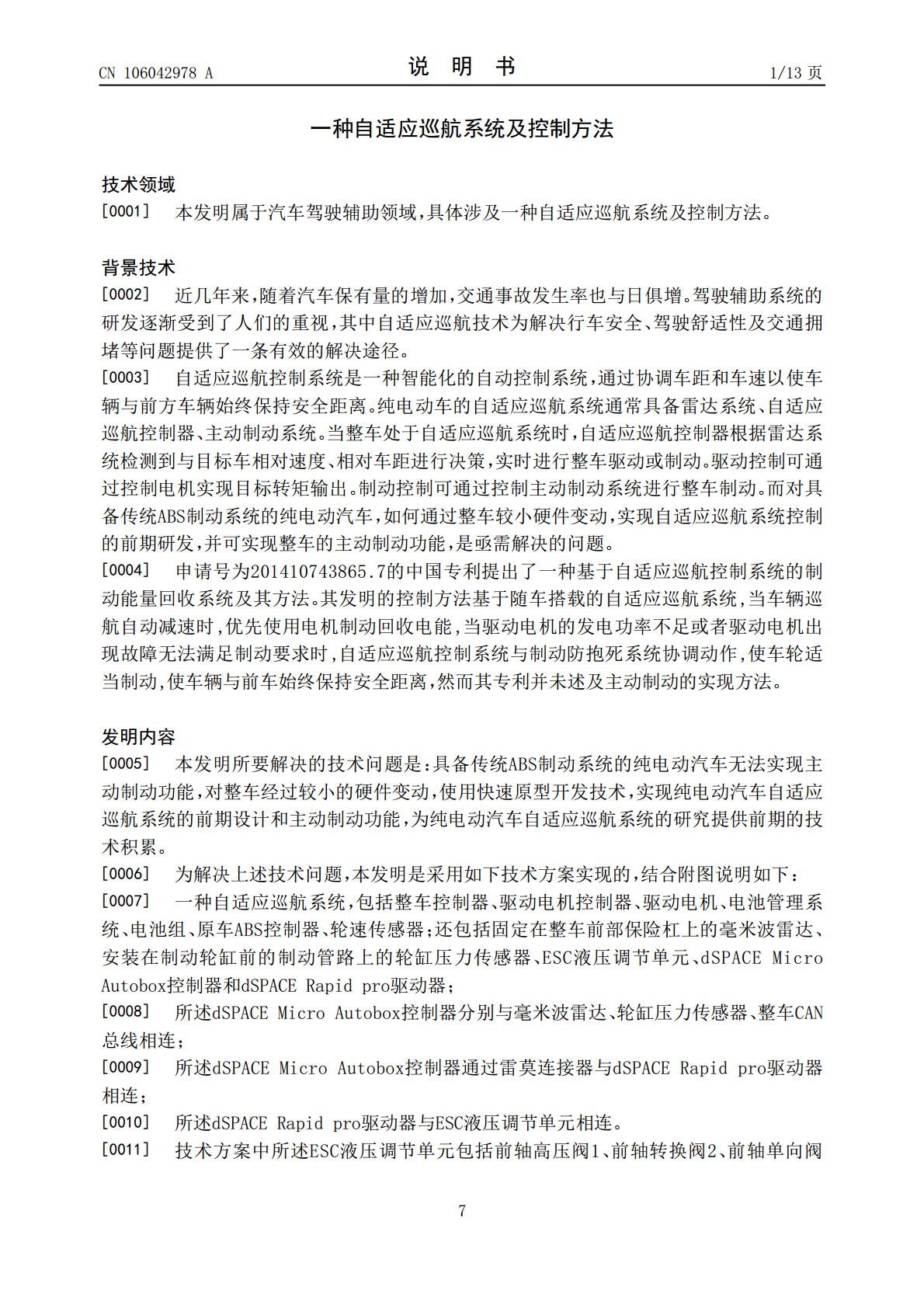
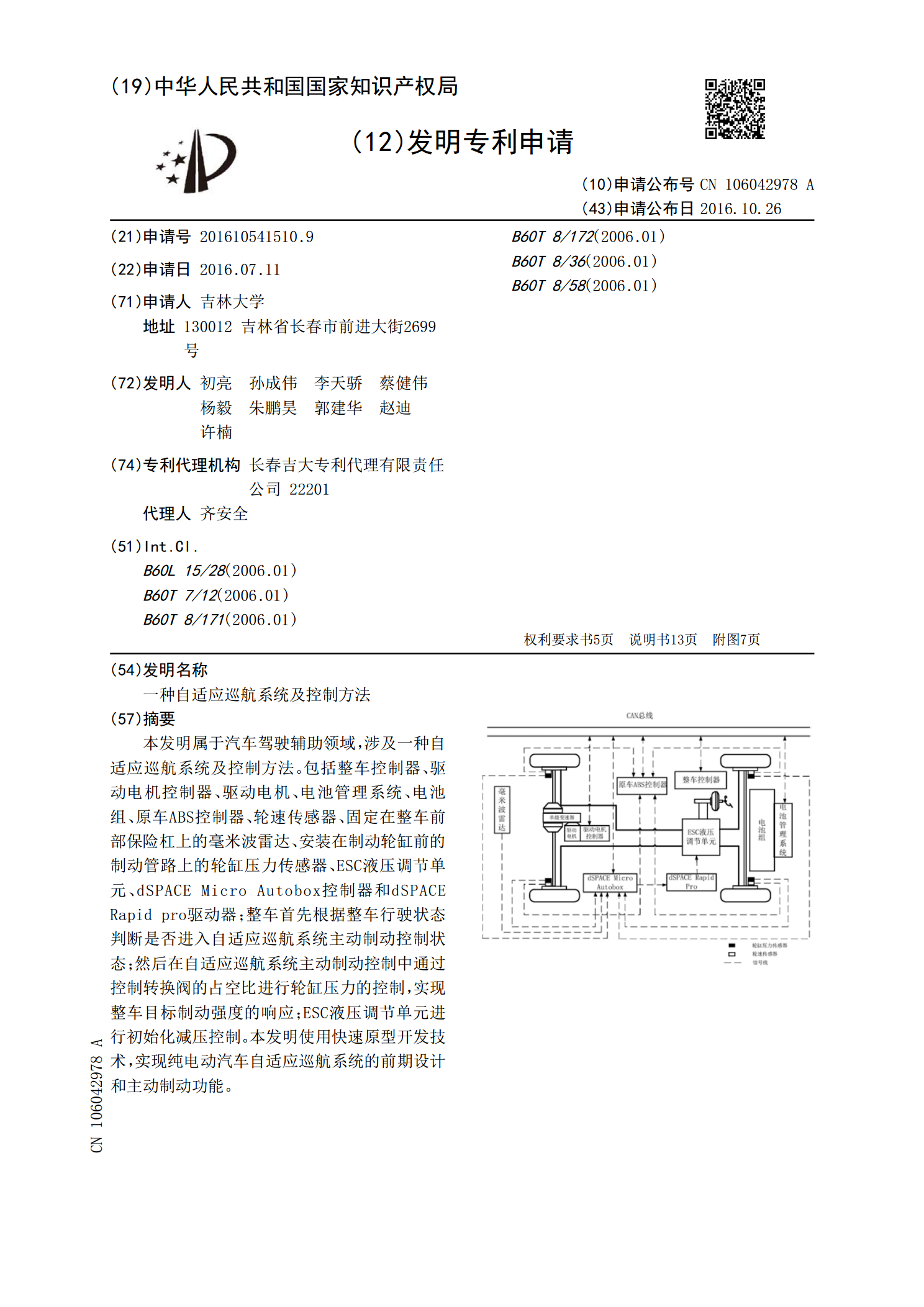
本发明属于汽车驾驶辅助领域,涉及一种自适应巡航系统及控制方法。包括整车控制器、驱动电机控制器、驱动电机、电池管理系统、电池组、原车ABS控制器、轮速传感器、固定在整车前部保险杠上的毫米波雷达、安装在制动轮缸前的制动管路上的轮缸压力传感器、ESC液压调节单元、dSPACEMicroAutobox控制器和dSPACERapidpro驱动器;整车首先根据整车行驶状态判断是否进入自适应巡航系统主动制动控制状态;然后在自适应巡航系统主动制动控制中通过控制转换阀的占空比进行轮缸压力的控制,实现整车目标制动强度
自适应巡航控制方法和系统.pdf
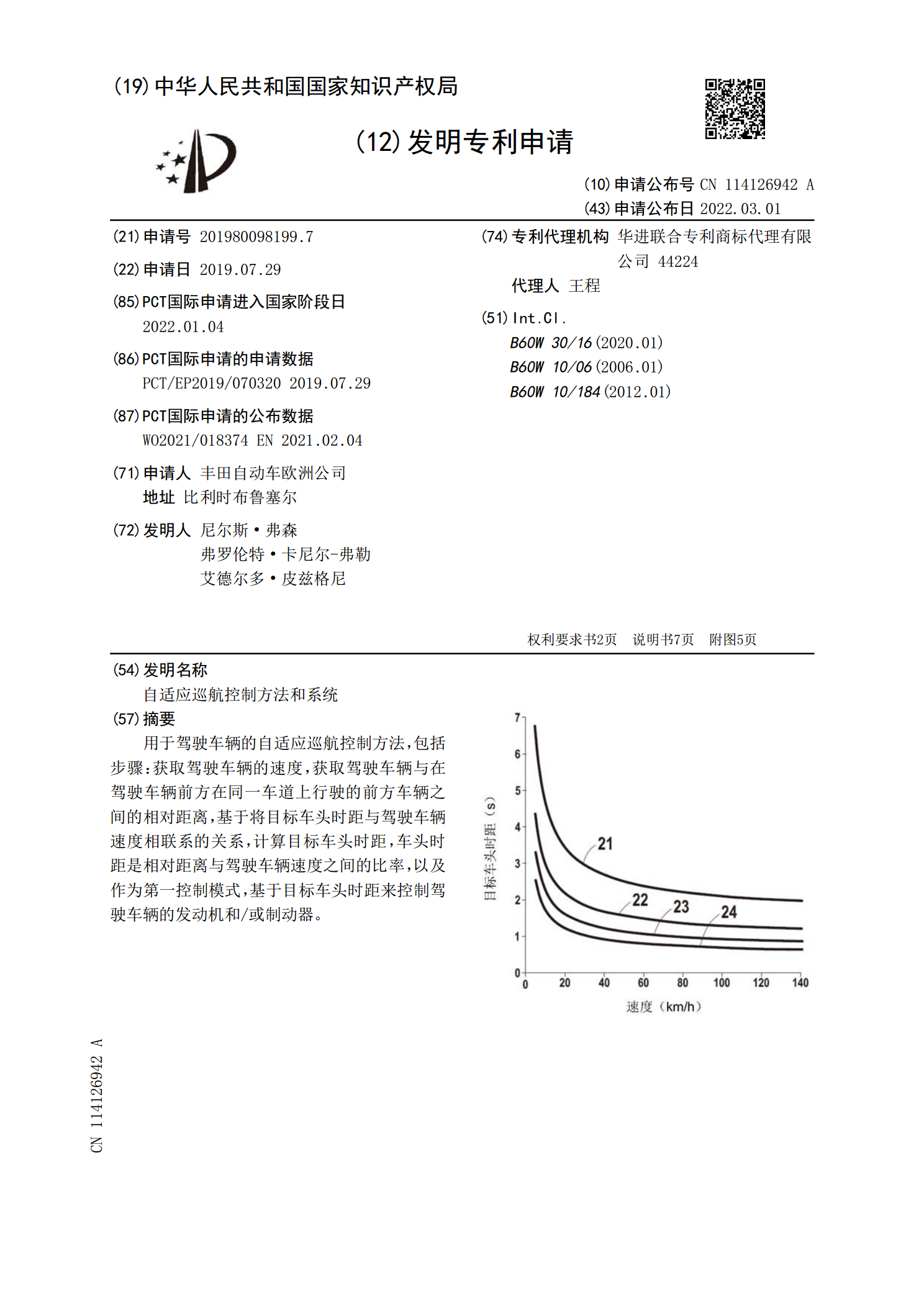
用于驾驶车辆的自适应巡航控制方法,包括步骤:获取驾驶车辆的速度,获取驾驶车辆与在驾驶车辆前方在同一车道上行驶的前方车辆之间的相对距离,基于将目标车头时距与驾驶车辆速度相联系的关系,计算目标车头时距,车头时距是相对距离与驾驶车辆速度之间的比率,以及作为第一控制模式,基于目标车头时距来控制驾驶车辆的发动机和/或制动器。
一种基于自适应巡航的车速控制方法及系统.pdf
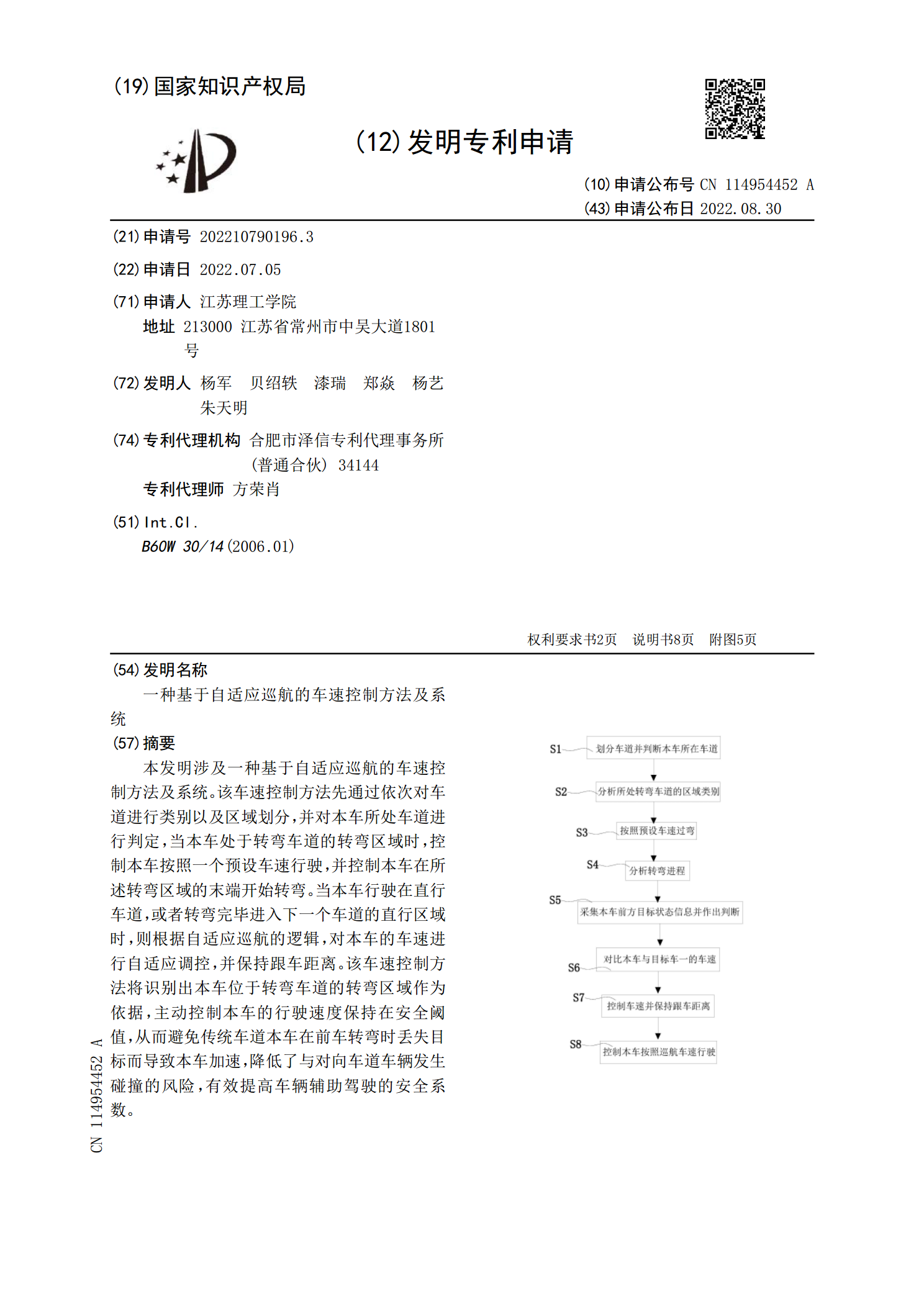
本发明涉及一种基于自适应巡航的车速控制方法及系统。该车速控制方法先通过依次对车道进行类别以及区域划分,并对本车所处车道进行判定,当本车处于转弯车道的转弯区域时,控制本车按照一个预设车速行驶,并控制本车在所述转弯区域的末端开始转弯。当本车行驶在直行车道,或者转弯完毕进入下一个车道的直行区域时,则根据自适应巡航的逻辑,对本车的车速进行自适应调控,并保持跟车距离。该车速控制方法将识别出本车位于转弯车道的转弯区域作为依据,主动控制本车的行驶速度保持在安全阈值,从而避免传统车道本车在前车转弯时丢失目标而导致本车加速
一种汽车自适应巡航系统及其控制方法.pdf
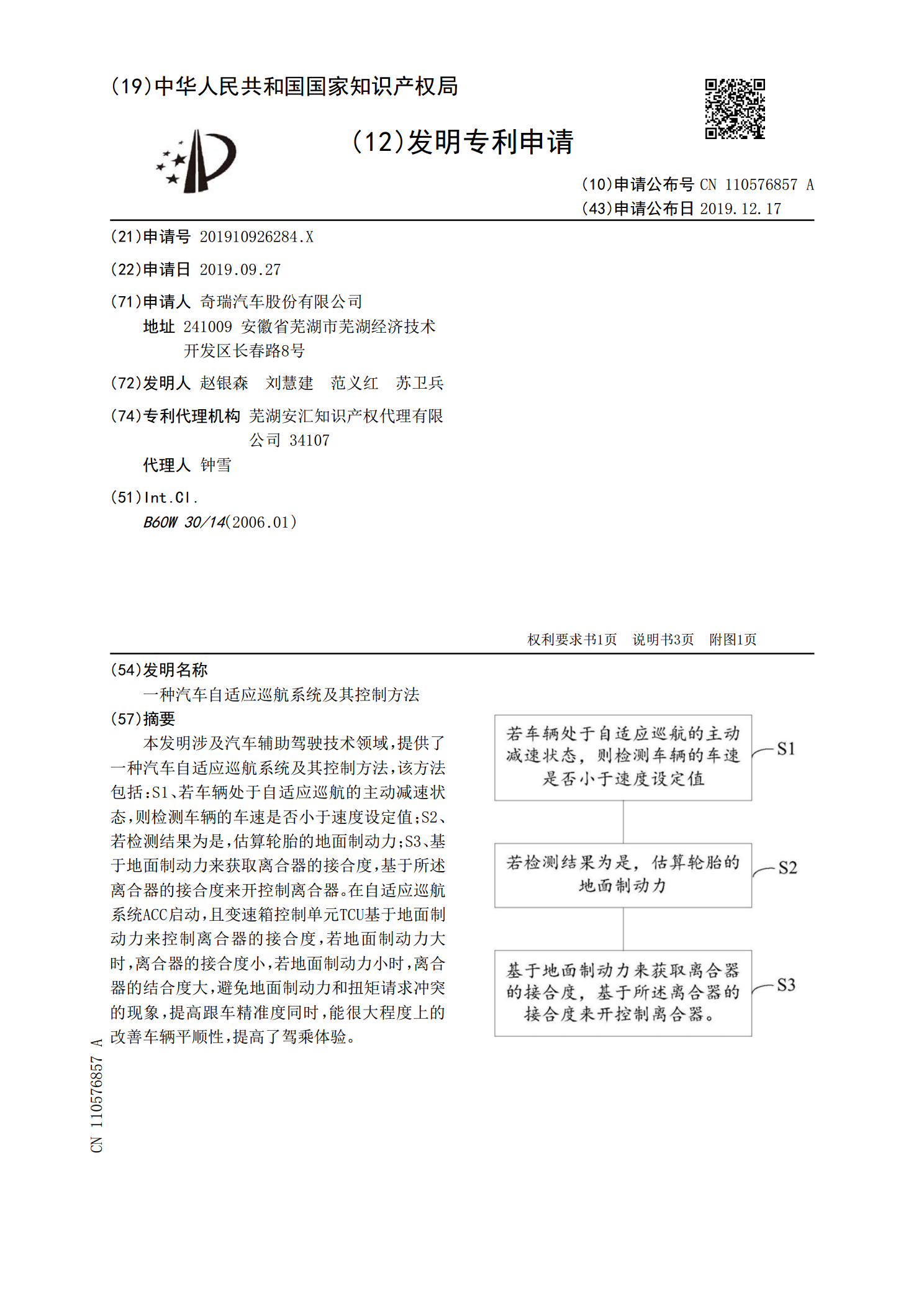
本发明涉及汽车辅助驾驶技术领域,提供了一种汽车自适应巡航系统及其控制方法,该方法包括:S1、若车辆处于自适应巡航的主动减速状态,则检测车辆的车速是否小于速度设定值;S2、若检测结果为是,估算轮胎的地面制动力;S3、基于地面制动力来获取离合器的接合度,基于所述离合器的接合度来开控制离合器。在自适应巡航系统ACC启动,且变速箱控制单元TCU基于地面制动力来控制离合器的接合度,若地面制动力大时,离合器的接合度小,若地面制动力小时,离合器的结合度大,避免地面制动力和扭矩请求冲突的现象,提高跟车精准度同时,能很大程
自适应巡航控制系统、方法及车辆.pdf
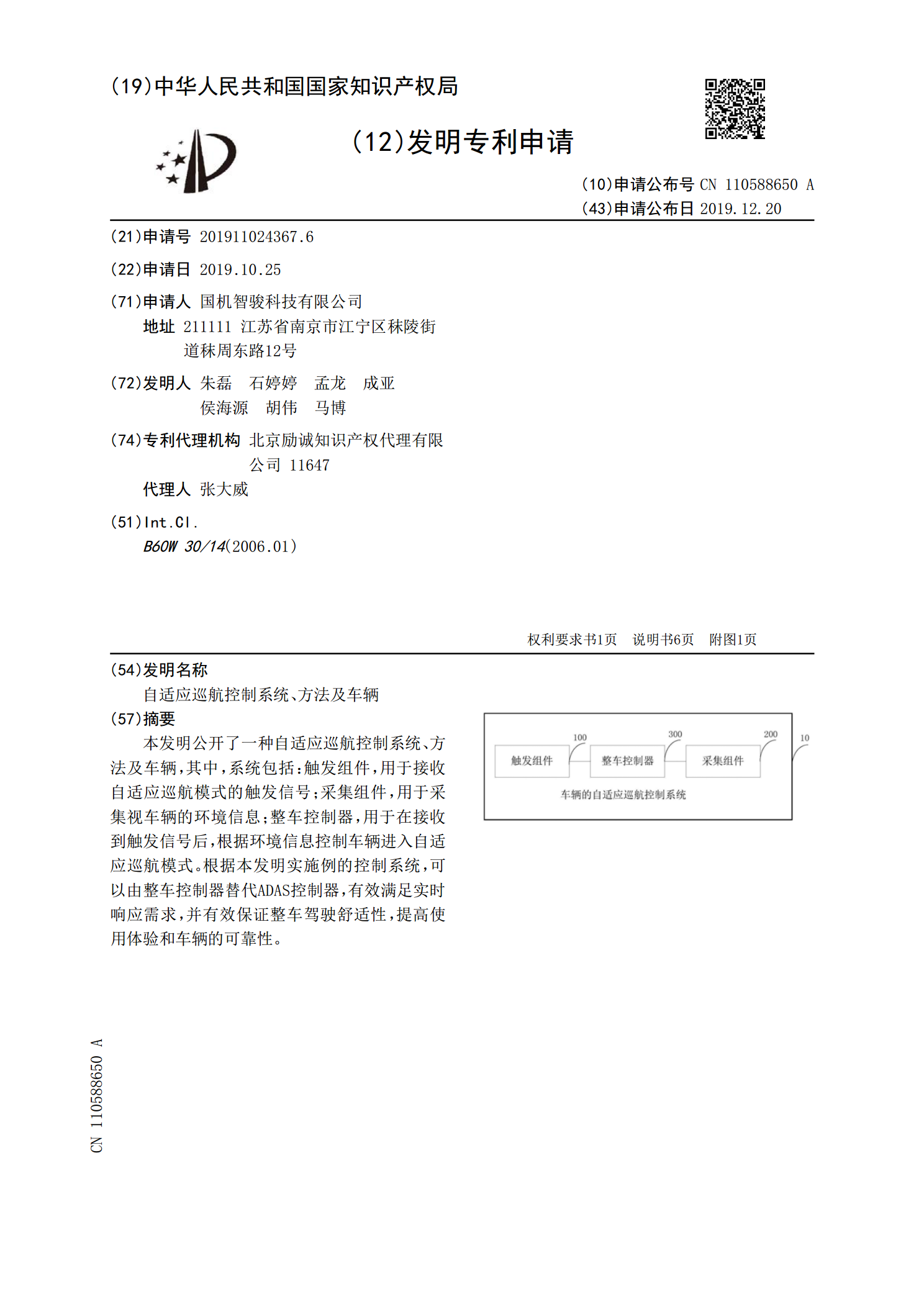
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。