
一种新型爬楼梯轮椅.pdf

一条****杉淑

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型爬楼梯轮椅.pdf
本发明涉及一种轮椅,特别涉及一种新型爬楼梯轮椅,属于轮椅相关领域。国内外现有的爬楼梯轮椅所存在的诸多问题。为此我们提出了一种新型的爬楼梯轮椅,其原理是通过填补台阶间的空缺,将轮椅爬楼梯这件事转化成轮椅爬坡。为实现上述构想,我们提出了一种新型的爬楼梯轮,因其具有适应性好能满足现有国家住建部规定的标准内的所有台阶尺寸,以及,对台阶不会产生永久性的伤害,不会过分依赖于台阶的某些特性的绝对优势。所以,未来应用前景十分光明。

一种新型爬楼梯轮椅.pdf
本发明涉及一种新型爬楼梯轮椅,具体涉及轮椅技术领域,包括轮椅主体,所述轮椅主体前后两侧均固定设有扶手,两个扶手底部均固定设有支撑杆,所述支撑杆底部固定设有安装板。本发明通过第一无刷电机倒转将弹簧和钢丝绳送到楼梯护栏的顶端,左转轮椅主体使钩子向右转挂在护栏上,第一无刷电机正转回收弹簧和钢丝绳,拉动轮椅主体进行爬楼,当需要下楼时,将钩子挂到护栏上,同时使第一无刷电机反转、第二无刷电机正转,使轮椅主体从楼梯上下移,右转轮椅主体使钩子从护栏上自动掉落,最后使用第一无刷电机将弹簧和钢丝绳收回就可以了,本结构的轮椅主
新型爬楼梯轮椅.pdf
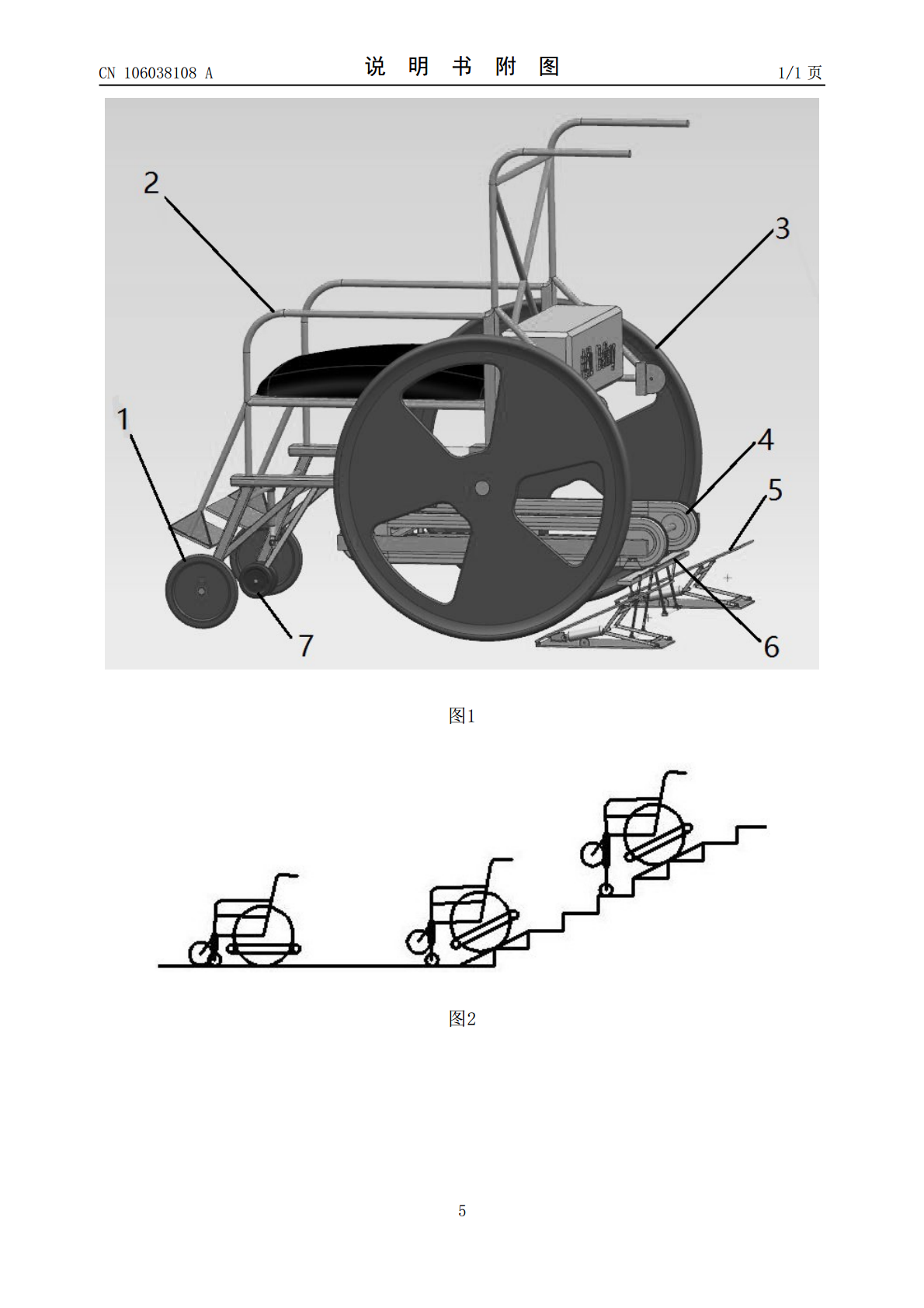
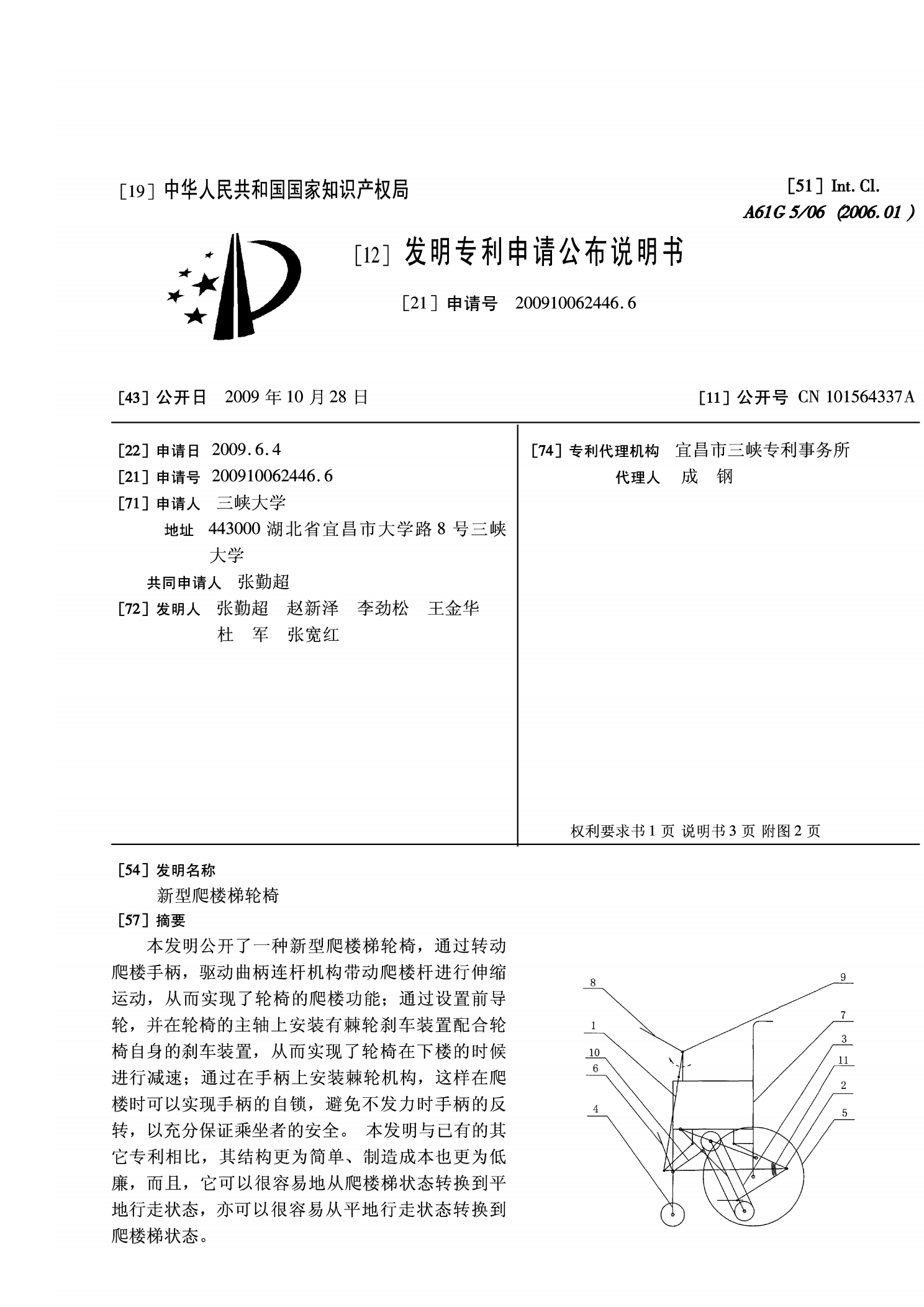
本发明公开了一种新型爬楼梯轮椅,通过转动爬楼手柄,驱动曲柄连杆机构带动爬楼杆进行伸缩运动,从而实现了轮椅的爬楼功能;通过设置前导轮,并在轮椅的主轴上安装有棘轮刹车装置配合轮椅自身的刹车装置,从而实现了轮椅在下楼的时候进行减速;通过在手柄上安装棘轮机构,这样在爬楼时可以实现手柄的自锁,避免不发力时手柄的反转,以充分保证乘坐者的安全。本发明与已有的其它专利相比,其结构更为简单、制造成本也更为低廉,而且,它可以很容易地从爬楼梯状态转换到平地行走状态,亦可以很容易从平地行走状态转换到爬楼梯状态。
一种新型的可攀爬楼梯轮椅.pdf
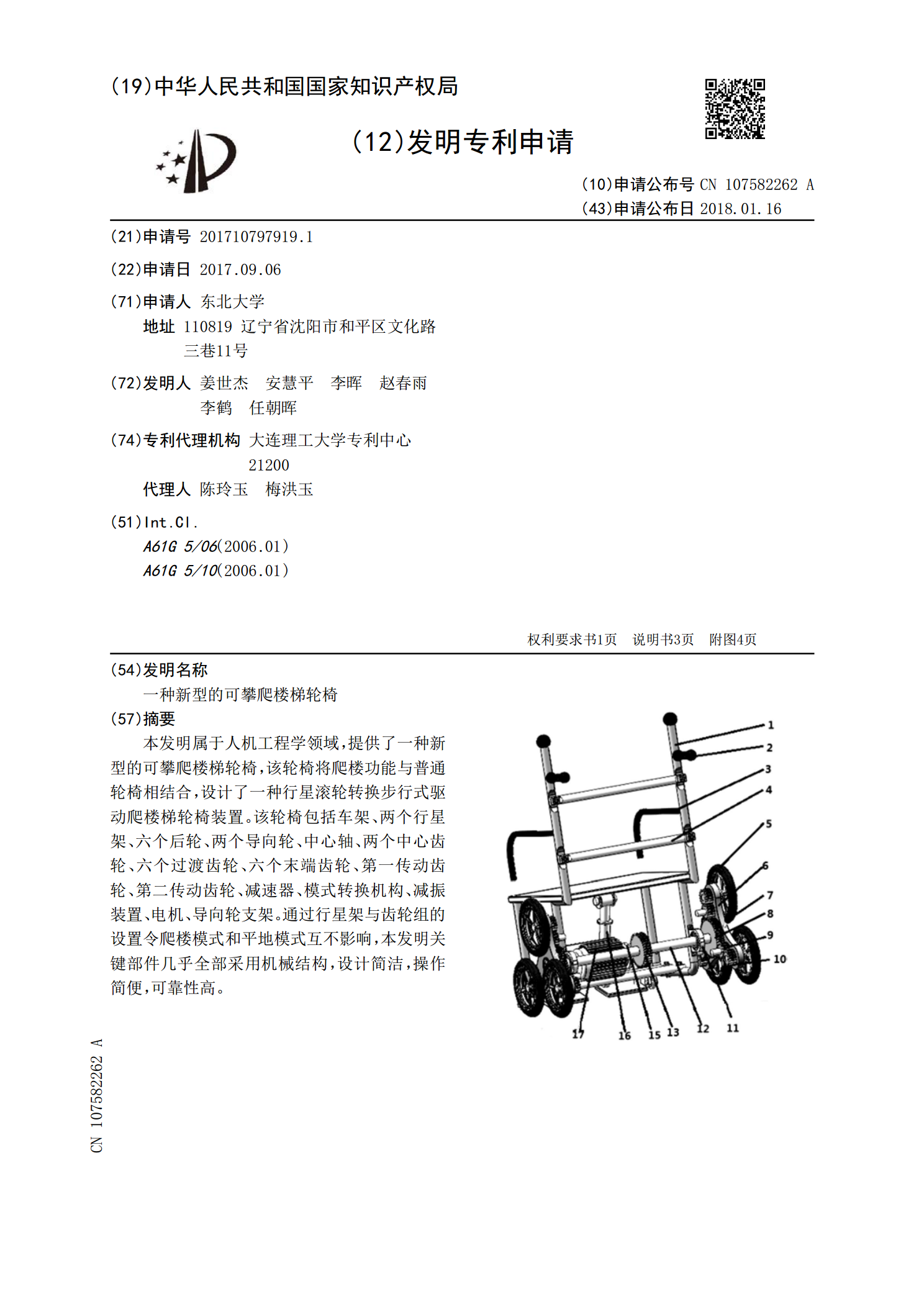
本发明属于人机工程学领域,提供了一种新型的可攀爬楼梯轮椅,该轮椅将爬楼功能与普通轮椅相结合,设计了一种行星滚轮转换步行式驱动爬楼梯轮椅装置。该轮椅包括车架、两个行星架、六个后轮、两个导向轮、中心轴、两个中心齿轮、六个过渡齿轮、六个末端齿轮、第一传动齿轮、第二传动齿轮、减速器、模式转换机构、减振装置、电机、导向轮支架。通过行星架与齿轮组的设置令爬楼模式和平地模式互不影响,本发明关键部件几乎全部采用机械结构,设计简洁,操作简便,可靠性高。
一种新型的爬楼梯电动轮椅.pdf
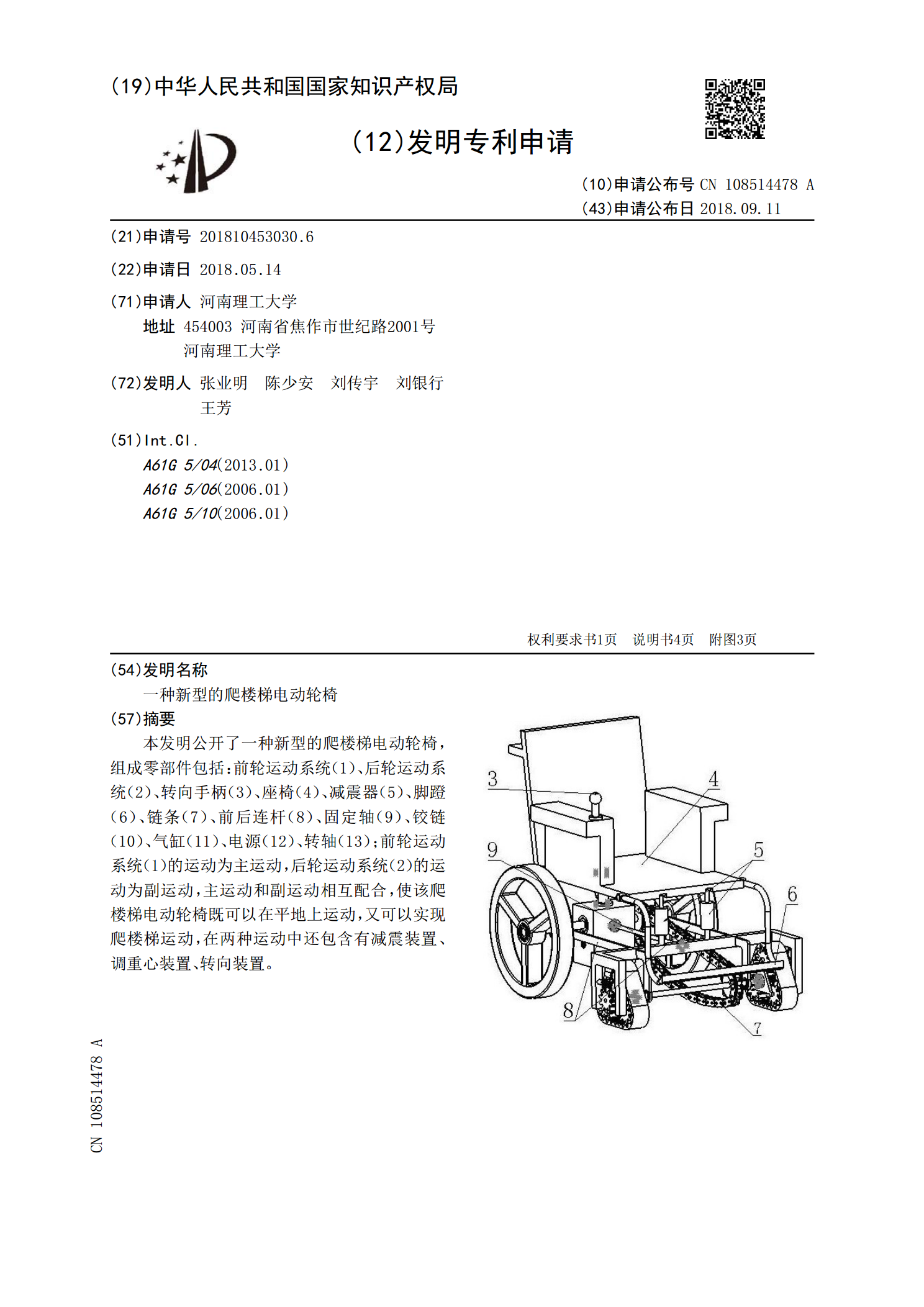
本发明公开了一种新型的爬楼梯电动轮椅,组成零部件包括:前轮运动系统(1)、后轮运动系统(2)、转向手柄(3)、座椅(4)、减震器(5)、脚蹬(6)、链条(7)、前后连杆(8)、固定轴(9)、铰链(10)、气缸(11)、电源(12)、转轴(13);前轮运动系统(1)的运动为主运动,后轮运动系统(2)的运动为副运动,主运动和副运动相互配合,使该爬楼梯电动轮椅既可以在平地上运动,又可以实现爬楼梯运动,在两种运动中还包含有减震装置、调重心装置、转向装置。