
行星减速机构.pdf

骊蓉****23


1/8
2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
行星减速机构.pdf
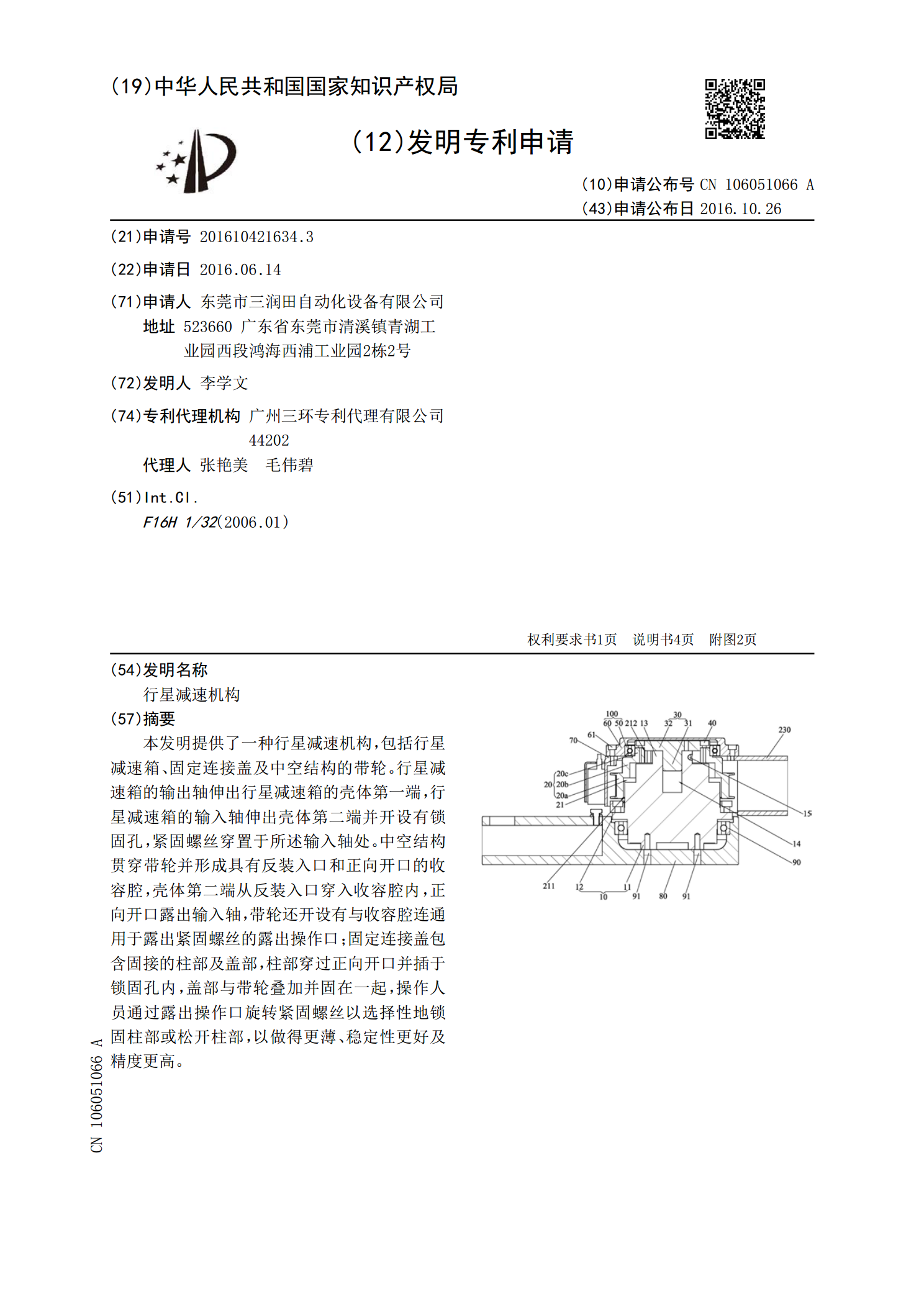
本发明提供了一种行星减速机构,包括行星减速箱、固定连接盖及中空结构的带轮。行星减速箱的输出轴伸出行星减速箱的壳体第一端,行星减速箱的输入轴伸出壳体第二端并开设有锁固孔,紧固螺丝穿置于所述输入轴处。中空结构贯穿带轮并形成具有反装入口和正向开口的收容腔,壳体第二端从反装入口穿入收容腔内,正向开口露出输入轴,带轮还开设有与收容腔连通用于露出紧固螺丝的露出操作口;固定连接盖包含固接的柱部及盖部,柱部穿过正向开口并插于锁固孔内,盖部与带轮叠加并固在一起,操作人员通过露出操作口旋转紧固螺丝以选择性地锁固柱部或松开柱部

行星减速机构.pdf
一种行星减速机构,其行星轮架上通过行星轮轴安装有输入行星齿轮和输出行星齿轮,所述行星轮架的输入端中央安装有中心齿轮,且中心齿轮与输入行星齿轮啮合输入动力;所述行星轮架的输入端通过轴承安装有输入内齿圈,且输入内齿圈与输入行星齿轮啮合,所述输入内齿圈靠近输出端一侧通过轴承安装有输出内齿圈,且输出内齿圈与输出行星齿轮啮合;所述行星轮架的输出端通过轴承安装有动力输出盘,所述输入内齿圈靠近输出端一侧固定有轴承座,所述动力输出盘通过YRT轴承安装在轴承座中,所述动力输出盘通过柔性联轴器与输出内齿圈连接。本发明结构紧凑

行星减速机构.pdf
本发明公开了一种行星减速机构,包括同轴设置的第一回转构件、第二回转构件以及第三回转构件,其中,第一回转构件、第二回转构件以及第三回转构件中有一个构件固定设置、另两个构件沿自身的回转轴线转动设置;第一回转构件的端面设有第一端面齿圈,第二回转构件的端面设有第二端面齿圈,第一端面齿圈与第二端面齿圈相对设置;第三回转构件上设有同时与第一端面齿圈和第二端面齿圈啮合的齿轮,齿轮沿其回转轴线转动设置于第三回转构件上且其齿轮的自转轴线与第一回转构件和第二回转构件的回转轴线垂直。本发明的行星减速机构中,单级传动比大、功率密

行星减速机构.pdf
一种行星减速机构,其箱体的左端安装有固定齿轮,箱体的右端通过第一轴承安装有行星轮架,齿轮轴通过第二轴承同心插装在固定齿轮和行星轮架的空腔中,且行星轮架的内端通过第三轴承安装在固定齿轮的外圆上,所述行星轮架上对称安装有齿轮组,所述齿轮组由同轴安装的第一行星齿轮和第二行星齿轮组成,且第一行星齿轮与固定齿轮啮合,第二行星齿轮与齿轮轴啮合;动力自行星轮架外端输入,行星轮架通过第一行星齿轮绕固定齿轮旋转的同时,第一行星齿轮和第二行星齿轮自转,再通过第二行星齿轮带动齿轮轴旋转输出动力,本发明结构紧凑,速比大,输入输出

行星机构及行星减速器.pdf
本发明实施例提出一种行星机构,包括:第一输入轴;第二输入轴,与所述第一输入轴同轴设置,并可转动地连接于所述第一输入轴;第一中心轮,固定在所述第一输入轴上;第二中心轮,固定在所述第二输入轴上;行星架,能够绕所述第一输入轴和所述第二输入轴转动;第二行星轮,与所述第二中心轮相互啮合;第一行星轮,与所述第一中心轮相互啮合;第一行星轮与第二行星轮啮合;以及输出齿轮,与所述行星架同轴固定。本申请实施例提出的同轴式行星机构不仅能够达到现有NGW型行星减速器的效果,同时在设计时还无需要考虑诸多限制条件。