
驱动装置和用于操作驱动装置的方法.pdf

永香****能手

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驱动装置和用于操作驱动装置的方法.pdf
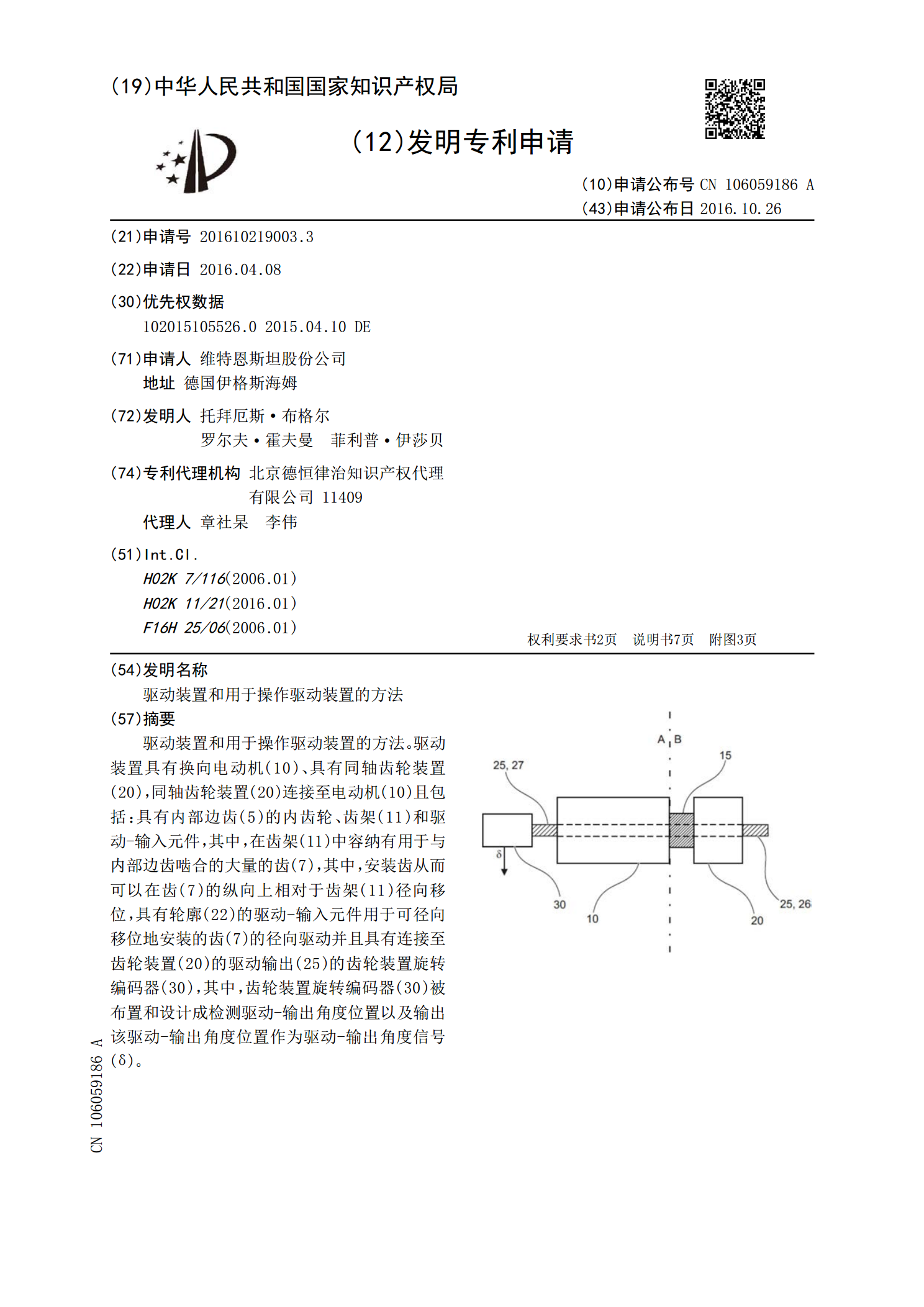
驱动装置和用于操作驱动装置的方法。驱动装置具有换向电动机(10)、具有同轴齿轮装置(20),同轴齿轮装置(20)连接至电动机(10)且包括:具有内部边齿(5)的内齿轮、齿架(11)和驱动‑输入元件,其中,在齿架(11)中容纳有用于与内部边齿啮合的大量的齿(7),其中,安装齿从而可以在齿(7)的纵向上相对于齿架(11)径向移位,具有轮廓(22)的驱动‑输入元件用于可径向移位地安装的齿(7)的径向驱动并且具有连接至齿轮装置(20)的驱动输出(25)的齿轮装置旋转编码器(30),其中,齿轮装置旋转编码器(30)
传动装置、具有传动装置的驱动装置和用于操作驱动装置的方法.pdf
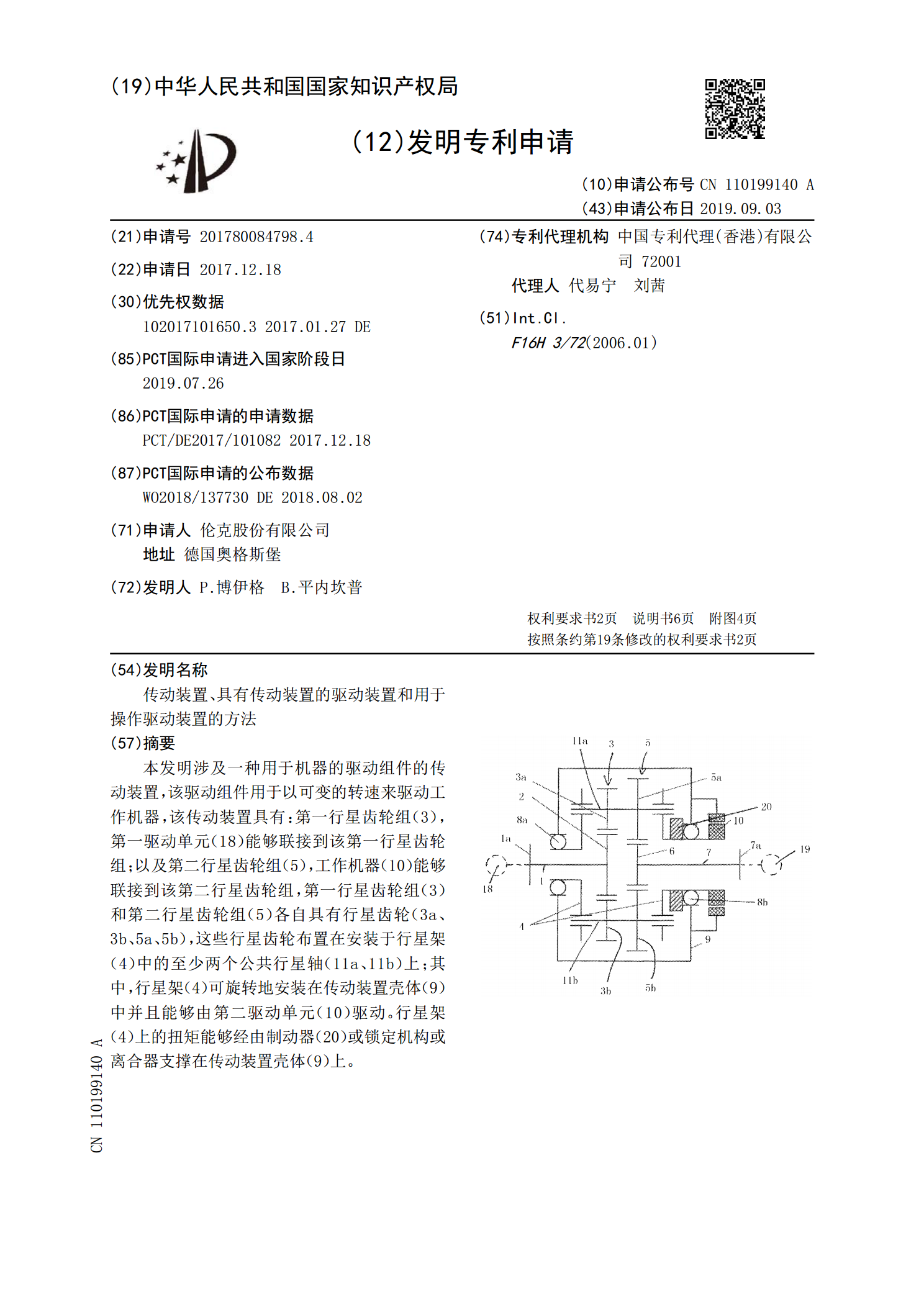
本发明涉及一种用于机器的驱动组件的传动装置,该驱动组件用于以可变的转速来驱动工作机器,该传动装置具有:第一行星齿轮组(3),第一驱动单元(18)能够联接到该第一行星齿轮组;以及第二行星齿轮组(5),工作机器(10)能够联接到该第二行星齿轮组,第一行星齿轮组(3)和第二行星齿轮组(5)各自具有行星齿轮(3a、3b、5a、5b),这些行星齿轮布置在安装于行星架(4)中的至少两个公共行星轴(11a、11b)上;其中,行星架(4)可旋转地安装在传动装置壳体(9)中并且能够由第二驱动单元(10)驱动。行星架(4)上

变速驱动装置和用于加工变速驱动装置的方法.pdf
本发明涉及一种变速驱动装置(10),尤其作为机动车中舒适驱动装置的组成部分,具有电动机(12),该电动机具有电枢轴(13),具有在电枢轴(13)上构成的啮合齿(16),该啮合齿与从动元件(17)的配对啮合齿(18)啮合,其中所述电枢轴(13)在其两个轴向端部部位(22,25)的部位里面与至少一外壳元件(11,15)至少间接地共同作用,用于限制电枢轴(13)在纵向(36)上的轴向运动,所述电枢轴(13)的至少一端部部位(25)布置成与摩擦元件(28)端面贴合接触。按照本发明,在与端部部位(25)对置的摩擦元
变速驱动装置和用于加工变速驱动装置的方法.pdf
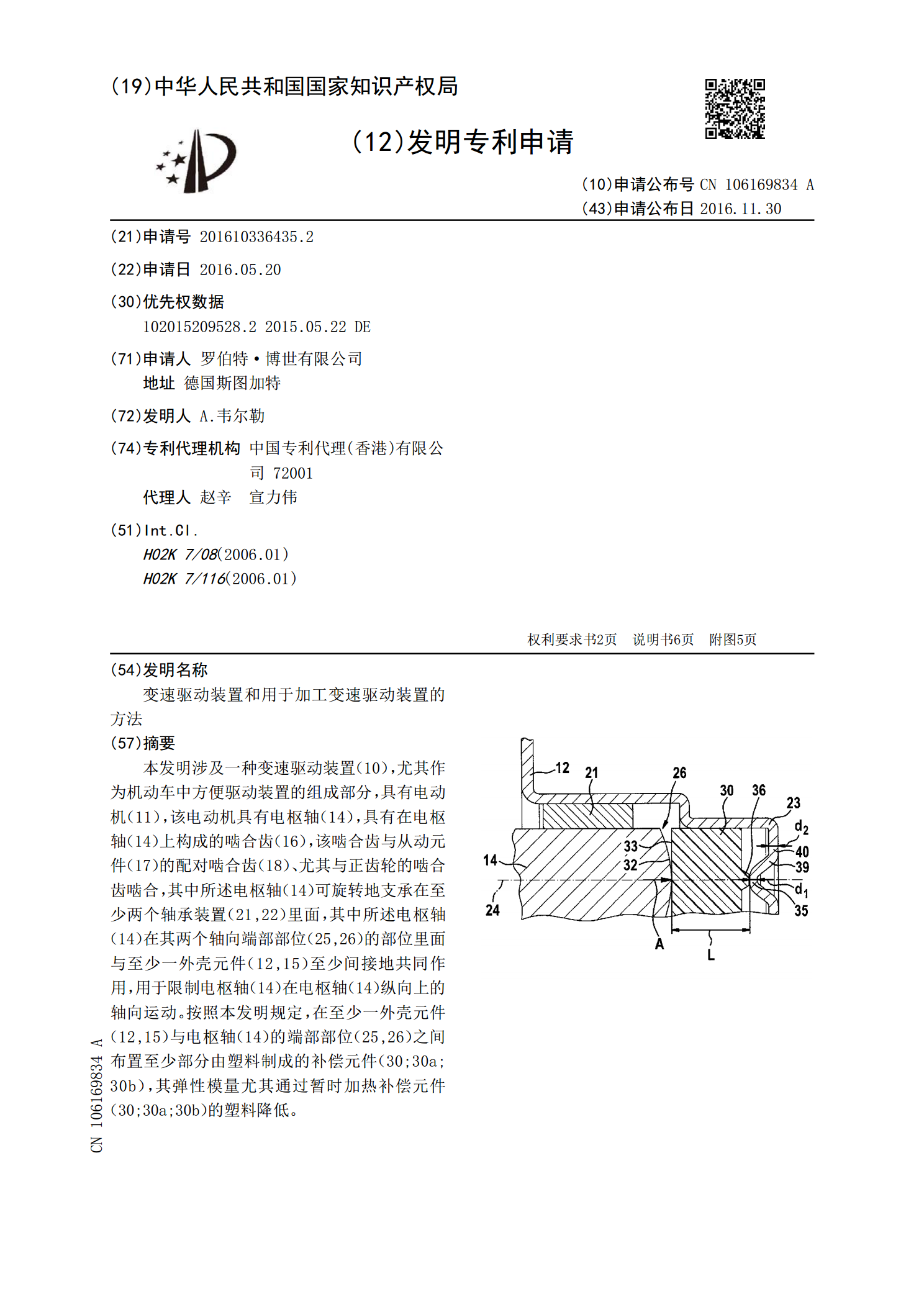
本发明涉及一种变速驱动装置(10),尤其作为机动车中方便驱动装置的组成部分,具有电动机(11),该电动机具有电枢轴(14),具有在电枢轴(14)上构成的啮合齿(16),该啮合齿与从动元件(17)的配对啮合齿(18)、尤其与正齿轮的啮合齿啮合,其中所述电枢轴(14)可旋转地支承在至少两个轴承装置(21,22)里面,其中所述电枢轴(14)在其两个轴向端部部位(25,26)的部位里面与至少一外壳元件(12,15)至少间接地共同作用,用于限制电枢轴(14)在电枢轴(14)纵向上的轴向运动。按照本发明规定,在至少一
驱动装置和用于驱动装置的组件.pdf
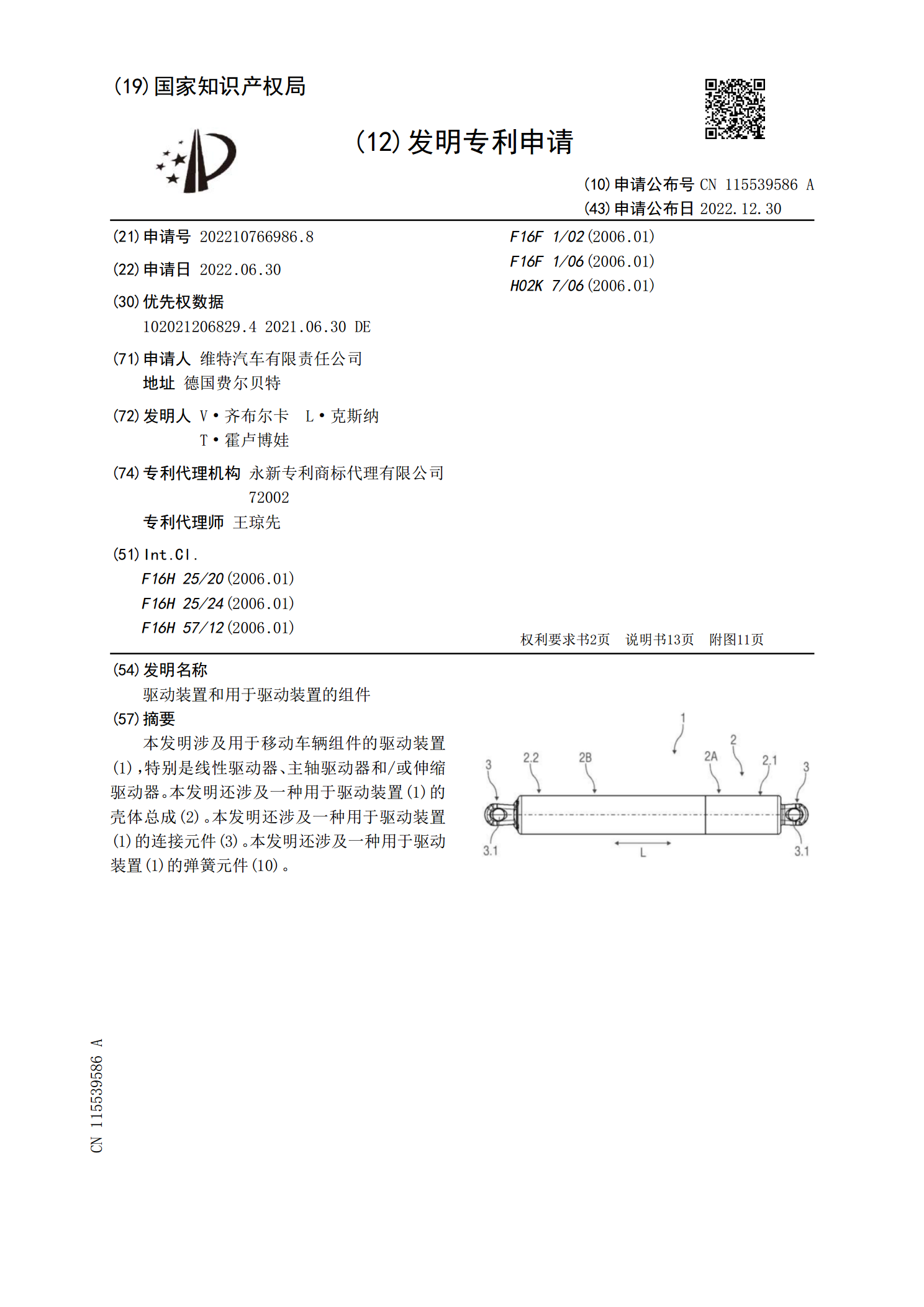
本发明涉及用于移动车辆组件的驱动装置(1),特别是线性驱动器、主轴驱动器和/或伸缩驱动器。本发明还涉及一种用于驱动装置(1)的壳体总成(2)。本发明还涉及一种用于驱动装置(1)的连接元件(3)。本发明还涉及一种用于驱动装置(1)的弹簧元件(10)。