
一种电子凸轮补偿控制方法.pdf

努力****晓骞


1/6

2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电子凸轮补偿控制方法.pdf
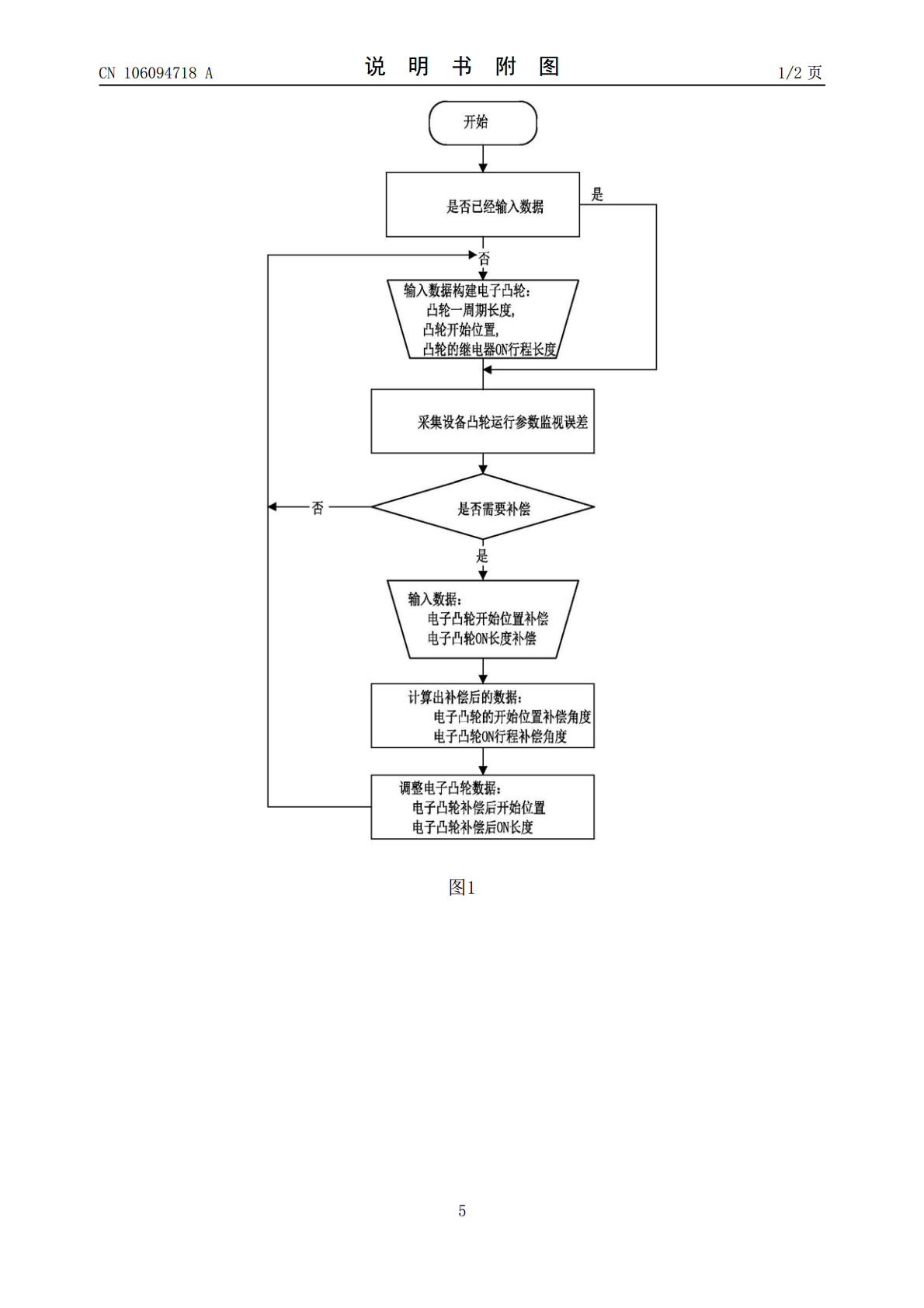
本发明涉及卫生用品设备领域,提供一种电子凸轮补偿控制方法,包括如下步骤:(1)在人机界面中输入凸轮开始位置L1、凸轮转动一周行程的长度L2和继电器ON行程的长度L3参数构建电子凸轮;(2)由人机界面采集凸轮实际输出中需要的补偿时间,再由人机界面将补偿时间根据公式计算转换成电子凸轮的补偿角度,将计算出的电子凸轮补偿角度叠加到电子凸轮的开始位置角度和电子凸轮ON行程的角度参数上,确定补偿量后在人机界面中设置开始位置补偿,位置补偿后开始正常运行,保持正确的凸轮输出。本发明解决现有电子凸轮的控制操作效率低、电子凸

一种电子凸轮的控制方法.pdf
本发明公开了一种电子凸轮的控制方法,其包括用作控制模块的处理器、用作通讯模块的单片机,以及执行单元;其中,用作控制模块的处理器接收传感器信号,结合设定的参数,通过运算输出控制信号到I/O电路;用作通讯模块的单片机通过RS232接口与触摸屏通信,接收来自触摸屏的控制指令和相关数据,上述控制模块和通讯模块之间通过TTL电平信号联络;执行单元包括伺服驱动器和伺服电机;用作控制模块的处理器对电子凸轮的速度与加速度分别使用三次函数与二次函数进行运动轨迹控制。本发明的电子凸轮的控制方法,其加工精度高、运动灵活且平滑,

电子凸轮控制装置及方法.pdf
本发明提供了一种电子凸轮控制装置,包括伺服驱动模块且该伺服驱动模块包括位置环,所述电子凸轮控制装置还包括参考位置获取模块以及电子凸轮模块,其中所述参考位置获取模块用于获取主轴位置,所述电子凸轮模块根据所述主轴位置计算从轴运行位置并将该从轴运行位置输入伺服驱动模块的位置环,所述伺服驱动模块根据所述位置环的输入向伺服电机输出控制信号。本发明还提供一种对应的方法。本发明将主轴位置获取、插补运算及伺服驱动集成一起,减少了指令传输中的不可靠因素,增强了电子凸轮控制的可靠性,同时节省了成本。
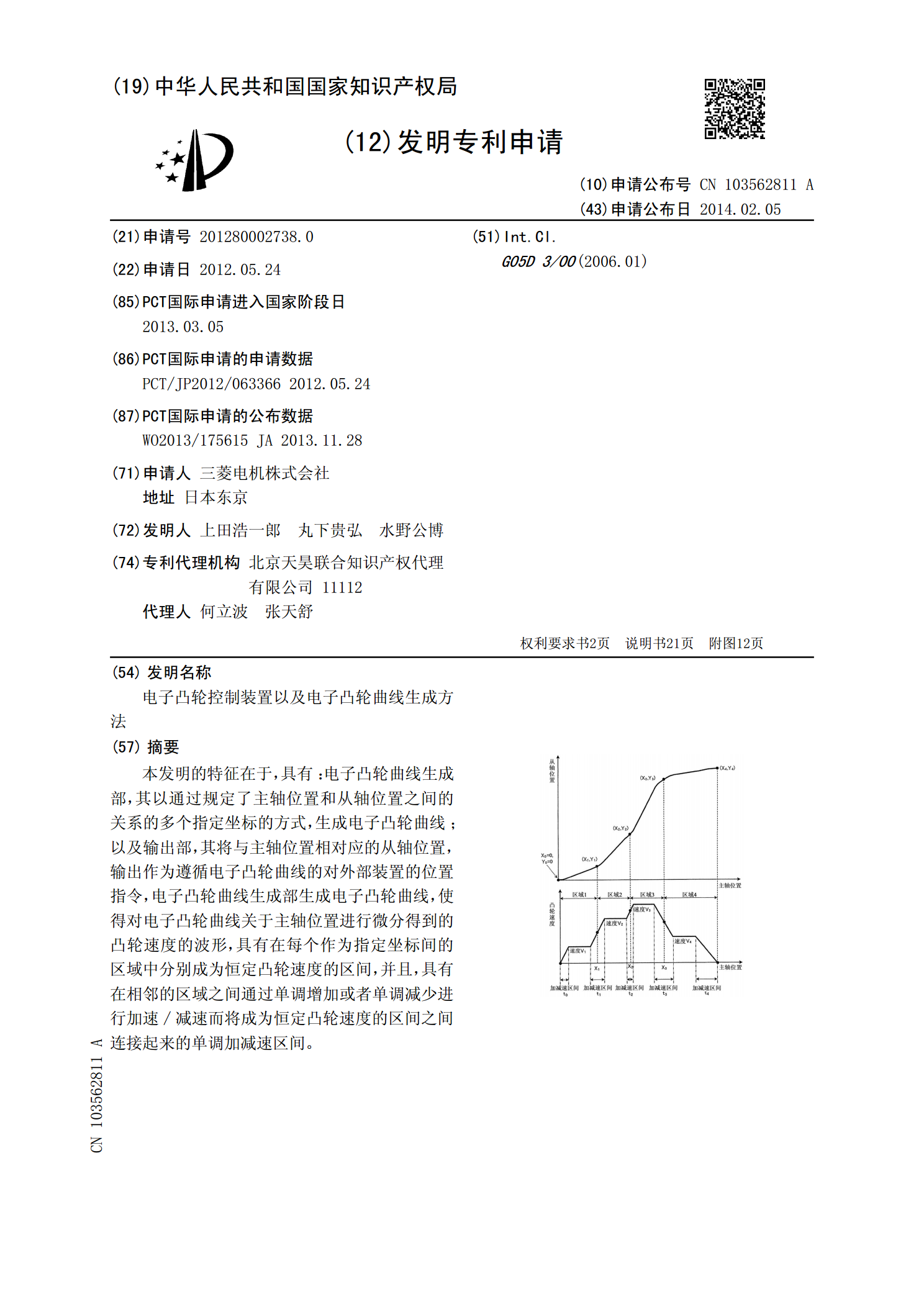
电子凸轮控制装置以及电子凸轮曲线生成方法.pdf
本发明的特征在于,具有:电子凸轮曲线生成部,其以通过规定了主轴位置和从轴位置之间的关系的多个指定坐标的方式,生成电子凸轮曲线;以及输出部,其将与主轴位置相对应的从轴位置,输出作为遵循电子凸轮曲线的对外部装置的位置指令,电子凸轮曲线生成部生成电子凸轮曲线,使得对电子凸轮曲线关于主轴位置进行微分得到的凸轮速度的波形,具有在每个作为指定坐标间的区域中分别成为恒定凸轮速度的区间,并且,具有在相邻的区域之间通过单调增加或者单调减少进行加速/减速而将成为恒定凸轮速度的区间之间连接起来的单调加减速区间。
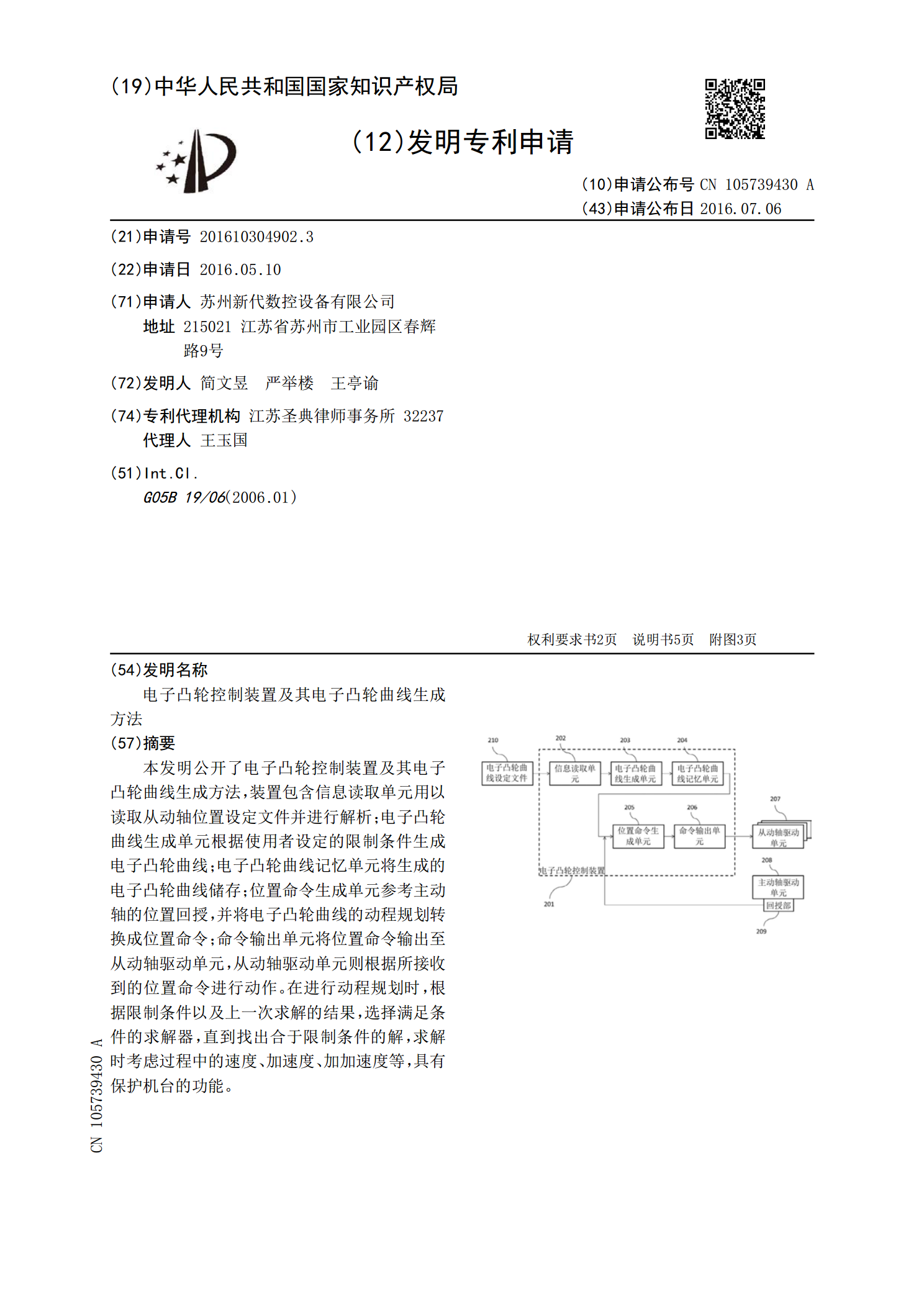
电子凸轮控制装置及其电子凸轮曲线生成方法.pdf
本发明公开了电子凸轮控制装置及其电子凸轮曲线生成方法,装置包含信息读取单元用以读取从动轴位置设定文件并进行解析;电子凸轮曲线生成单元根据使用者设定的限制条件生成电子凸轮曲线;电子凸轮曲线记忆单元将生成的电子凸轮曲线储存;位置命令生成单元参考主动轴的位置回授,并将电子凸轮曲线的动程规划转换成位置命令;命令输出单元将位置命令输出至从动轴驱动单元,从动轴驱动单元则根据所接收到的位置命令进行动作。在进行动程规划时,根据限制条件以及上一次求解的结果,选择满足条件的求解器,直到找出合于限制条件的解,求解时考虑过程中的