
电子凸轮控制装置及方法.pdf

是你****优呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电子凸轮控制装置及方法.pdf
本发明提供了一种电子凸轮控制装置,包括伺服驱动模块且该伺服驱动模块包括位置环,所述电子凸轮控制装置还包括参考位置获取模块以及电子凸轮模块,其中所述参考位置获取模块用于获取主轴位置,所述电子凸轮模块根据所述主轴位置计算从轴运行位置并将该从轴运行位置输入伺服驱动模块的位置环,所述伺服驱动模块根据所述位置环的输入向伺服电机输出控制信号。本发明还提供一种对应的方法。本发明将主轴位置获取、插补运算及伺服驱动集成一起,减少了指令传输中的不可靠因素,增强了电子凸轮控制的可靠性,同时节省了成本。
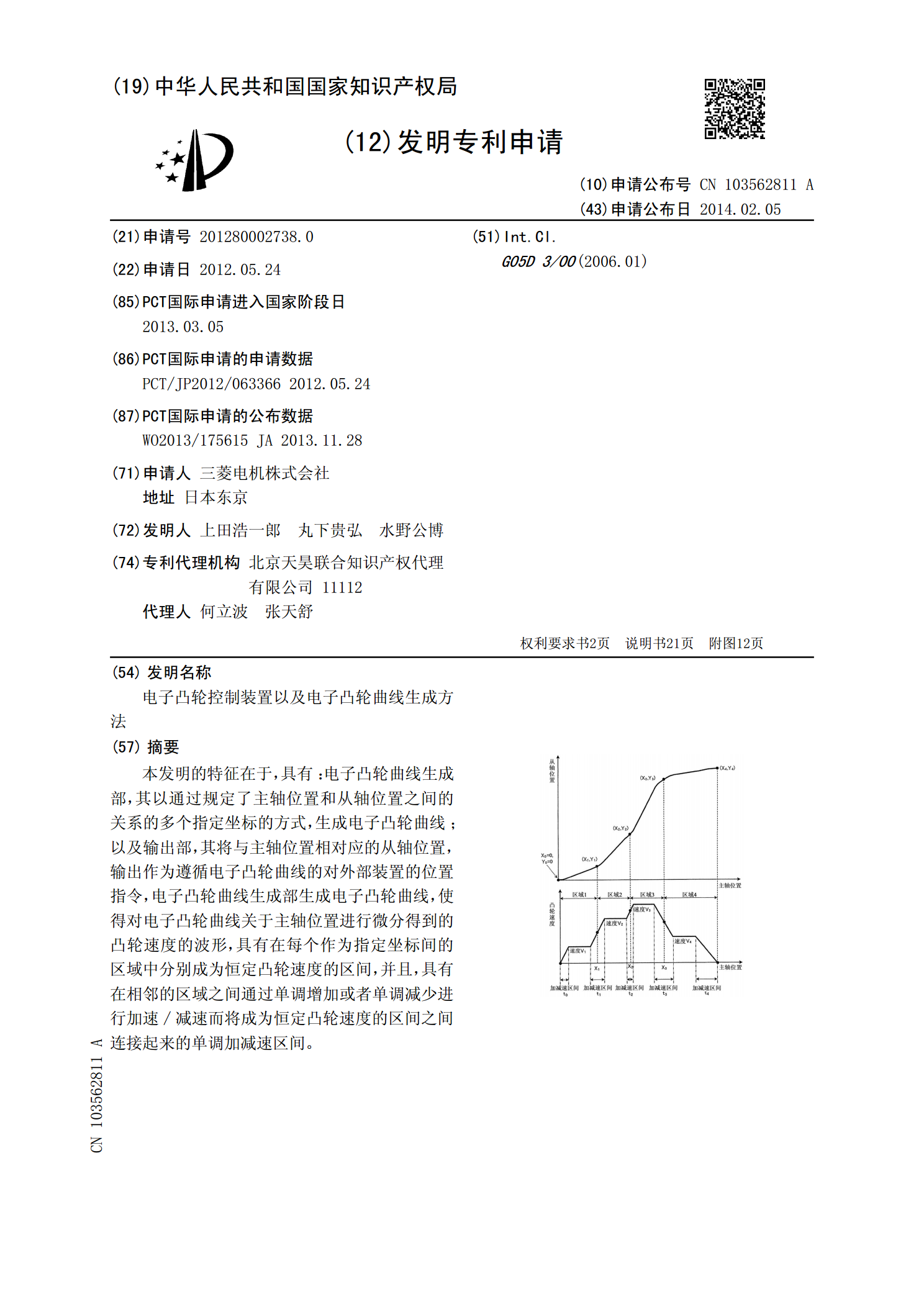
电子凸轮控制装置以及电子凸轮曲线生成方法.pdf
本发明的特征在于,具有:电子凸轮曲线生成部,其以通过规定了主轴位置和从轴位置之间的关系的多个指定坐标的方式,生成电子凸轮曲线;以及输出部,其将与主轴位置相对应的从轴位置,输出作为遵循电子凸轮曲线的对外部装置的位置指令,电子凸轮曲线生成部生成电子凸轮曲线,使得对电子凸轮曲线关于主轴位置进行微分得到的凸轮速度的波形,具有在每个作为指定坐标间的区域中分别成为恒定凸轮速度的区间,并且,具有在相邻的区域之间通过单调增加或者单调减少进行加速/减速而将成为恒定凸轮速度的区间之间连接起来的单调加减速区间。
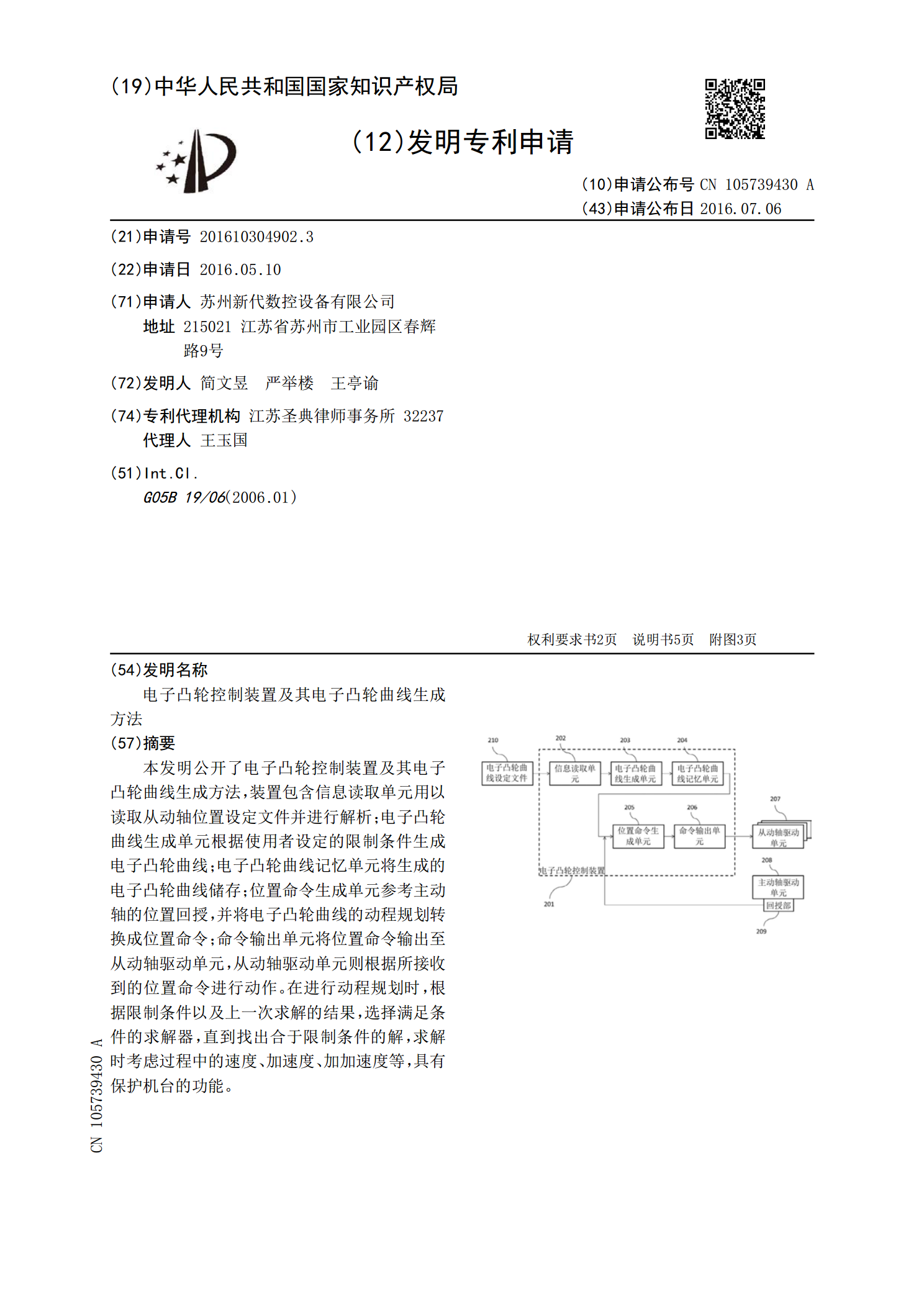
电子凸轮控制装置及其电子凸轮曲线生成方法.pdf
本发明公开了电子凸轮控制装置及其电子凸轮曲线生成方法,装置包含信息读取单元用以读取从动轴位置设定文件并进行解析;电子凸轮曲线生成单元根据使用者设定的限制条件生成电子凸轮曲线;电子凸轮曲线记忆单元将生成的电子凸轮曲线储存;位置命令生成单元参考主动轴的位置回授,并将电子凸轮曲线的动程规划转换成位置命令;命令输出单元将位置命令输出至从动轴驱动单元,从动轴驱动单元则根据所接收到的位置命令进行动作。在进行动程规划时,根据限制条件以及上一次求解的结果,选择满足条件的求解器,直到找出合于限制条件的解,求解时考虑过程中的
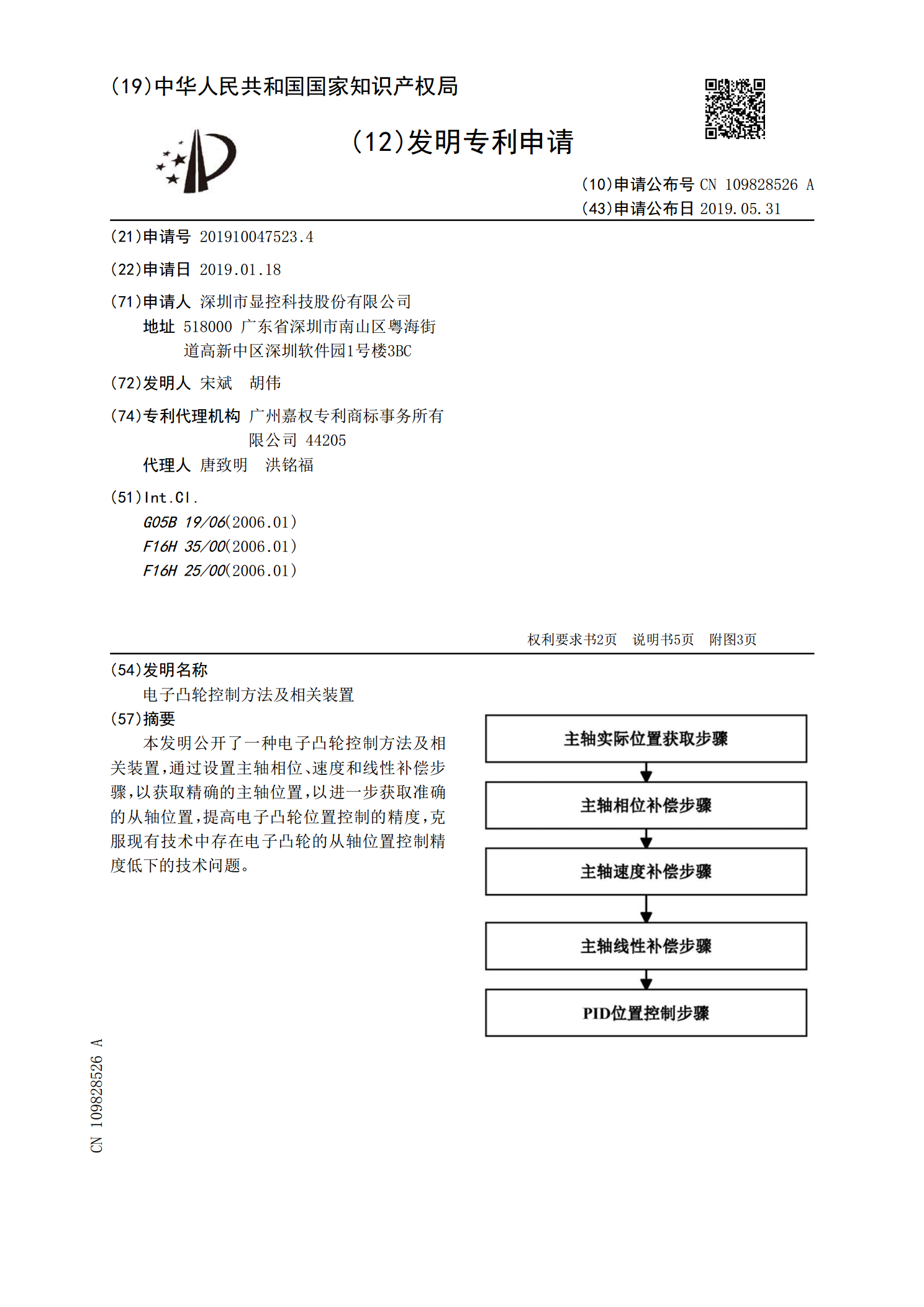
电子凸轮控制方法及相关装置.pdf
本发明公开了一种电子凸轮控制方法及相关装置,通过设置主轴相位、速度和线性补偿步骤,以获取精确的主轴位置,以进一步获取准确的从轴位置,提高电子凸轮位置控制的精度,克服现有技术中存在电子凸轮的从轴位置控制精度低下的技术问题。

电子凸轮曲线的确定方法及装置、控制方法及系统、设备.pdf
本发明实施例提供了一种电子凸轮曲线的确定方法及装置、钢壳打环机的控制方法及系统、计算设备、计算机可读介质。确定方法包括:确定在所述第二转盘执行所述第一动作时对应的第一角速度之比;确定在所述第二转盘执行所述第二动作时对应的第二角速度之比;根据所述第一角速度之比和所述第二角速度之比,确定所述电子凸轮曲线。本发明实施例确定的电子凸轮曲线可以保证第二转盘可以平稳的承接上游下发的工件,也可以平稳的向下游下发工件,提高了工件的传递成功率,从而提高了钢壳的生产效率。