
一种智能扫地机器人.pdf

是你****平呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能扫地机器人.pdf
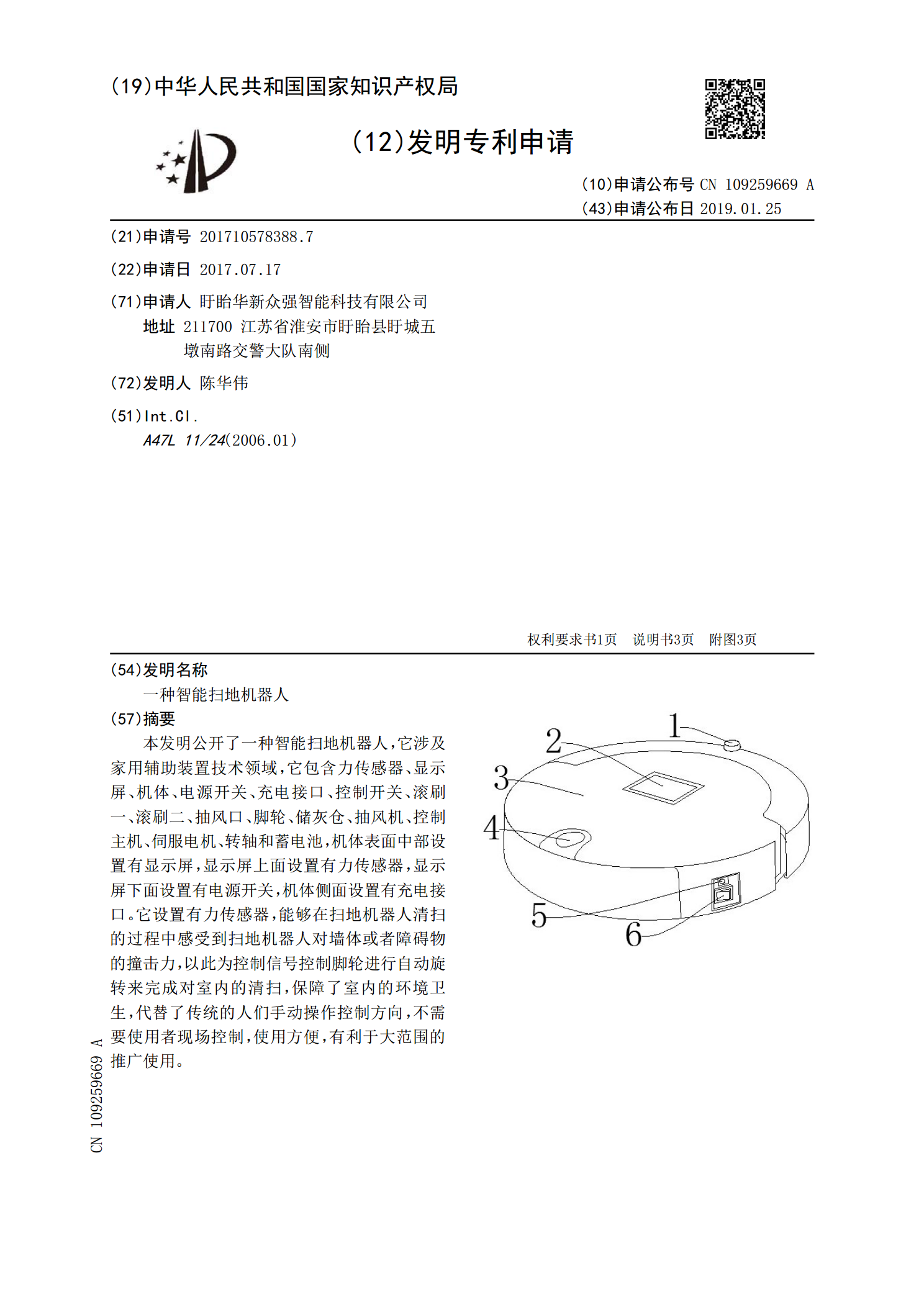
本发明公开了一种智能扫地机器人,它涉及家用辅助装置技术领域,它包含力传感器、显示屏、机体、电源开关、充电接口、控制开关、滚刷一、滚刷二、抽风口、脚轮、储灰仓、抽风机、控制主机、伺服电机、转轴和蓄电池,机体表面中部设置有显示屏,显示屏上面设置有力传感器,显示屏下面设置有电源开关,机体侧面设置有充电接口。它设置有力传感器,能够在扫地机器人清扫的过程中感受到扫地机器人对墙体或者障碍物的撞击力,以此为控制信号控制脚轮进行自动旋转来完成对室内的清扫,保障了室内的环境卫生,代替了传统的人们手动操作控制方向,不需要使用
一种智能扫地机器人.pdf
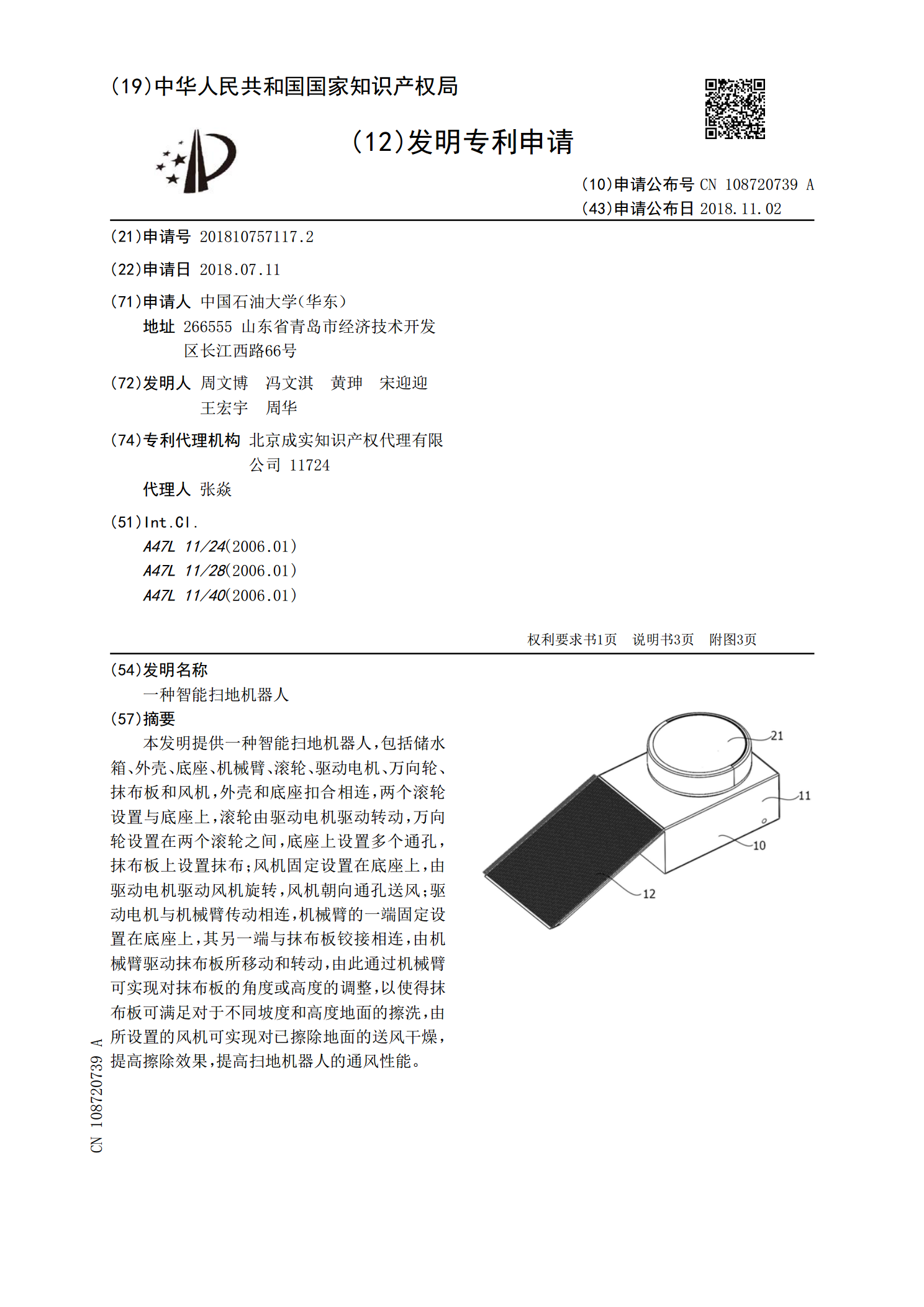
本发明提供一种智能扫地机器人,包括储水箱、外壳、底座、机械臂、滚轮、驱动电机、万向轮、抹布板和风机,外壳和底座扣合相连,两个滚轮设置与底座上,滚轮由驱动电机驱动转动,万向轮设置在两个滚轮之间,底座上设置多个通孔,抹布板上设置抹布;风机固定设置在底座上,由驱动电机驱动风机旋转,风机朝向通孔送风;驱动电机与机械臂传动相连,机械臂的一端固定设置在底座上,其另一端与抹布板铰接相连,由机械臂驱动抹布板所移动和转动,由此通过机械臂可实现对抹布板的角度或高度的调整,以使得抹布板可满足对于不同坡度和高度地面的擦洗,由所设
一种智能扫地机器人.pdf
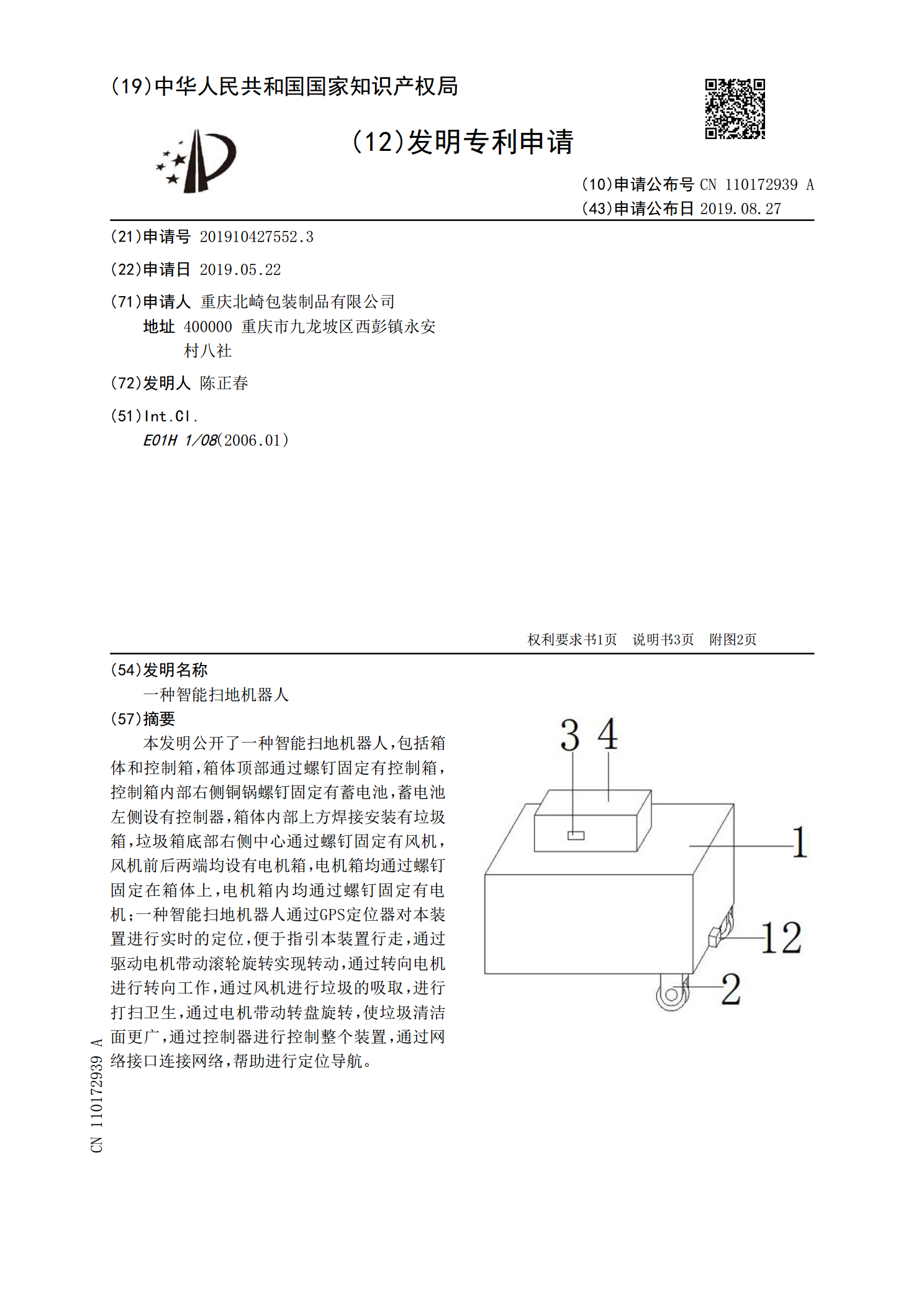
本发明公开了一种智能扫地机器人,包括箱体和控制箱,箱体顶部通过螺钉固定有控制箱,控制箱内部右侧铜锅螺钉固定有蓄电池,蓄电池左侧设有控制器,箱体内部上方焊接安装有垃圾箱,垃圾箱底部右侧中心通过螺钉固定有风机,风机前后两端均设有电机箱,电机箱均通过螺钉固定在箱体上,电机箱内均通过螺钉固定有电机;一种智能扫地机器人通过GPS定位器对本装置进行实时的定位,便于指引本装置行走,通过驱动电机带动滚轮旋转实现转动,通过转向电机进行转向工作,通过风机进行垃圾的吸取,进行打扫卫生,通过电机带动转盘旋转,使垃圾清洁面更广,通
一种智能扫地机器人.pdf
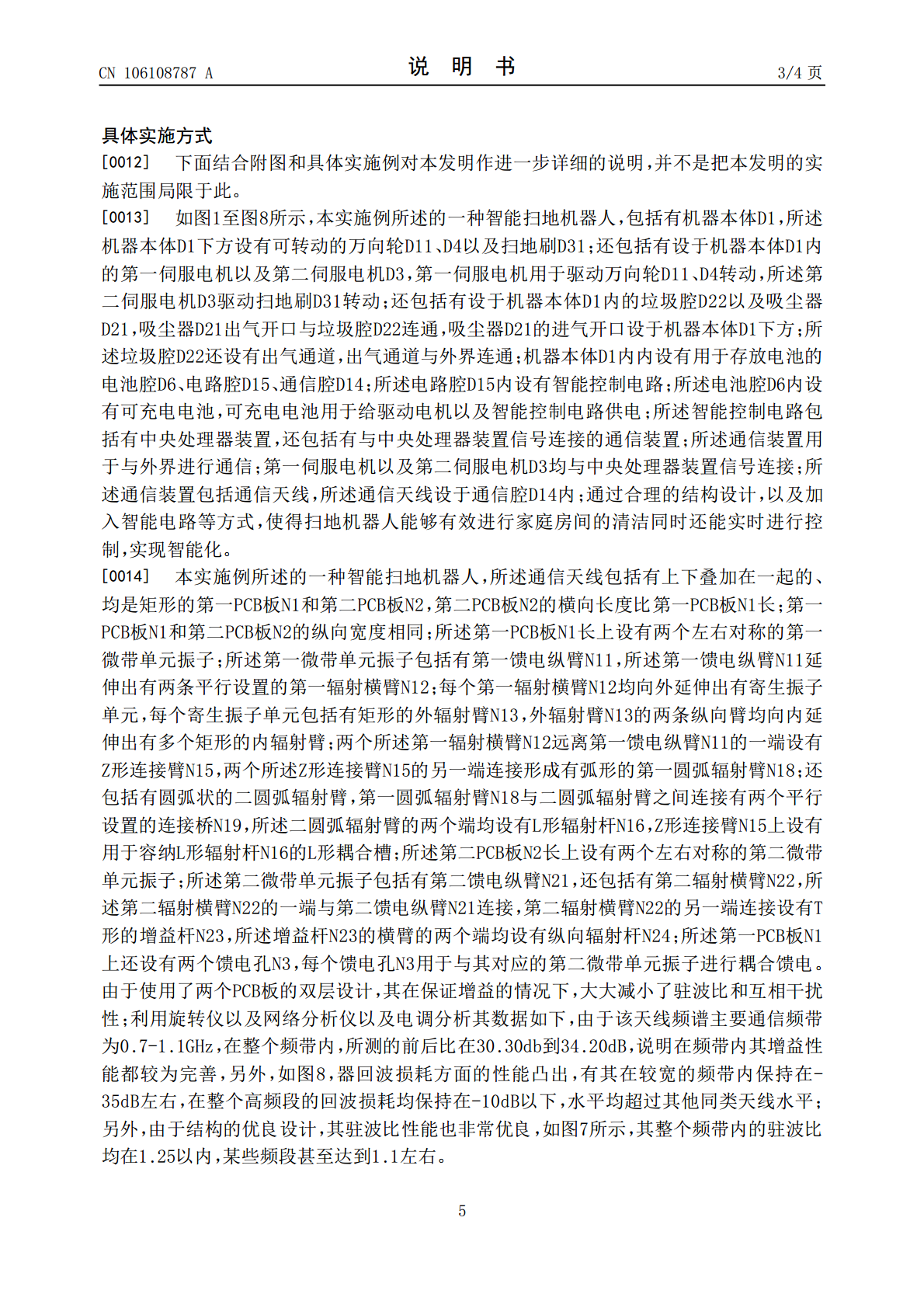
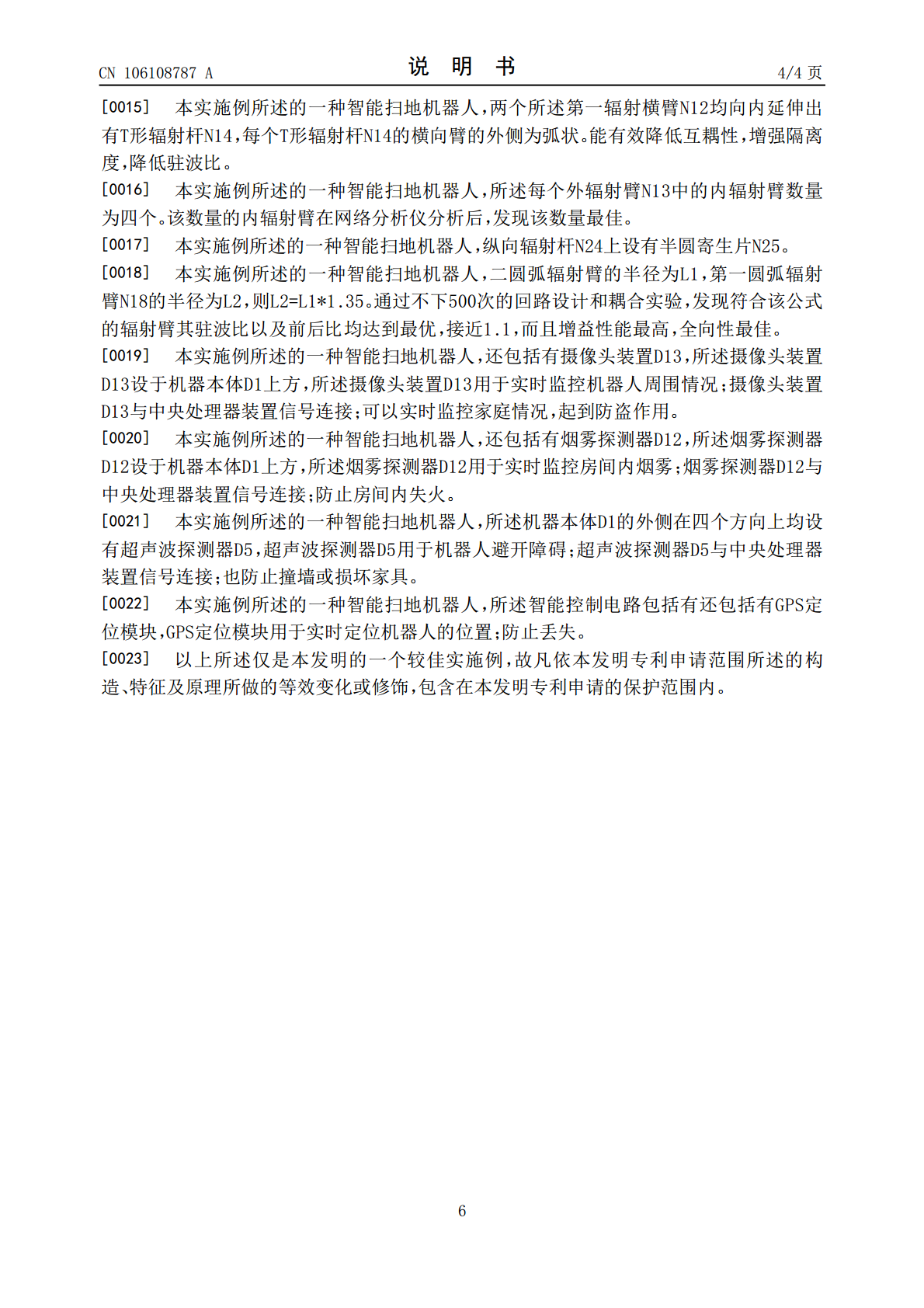
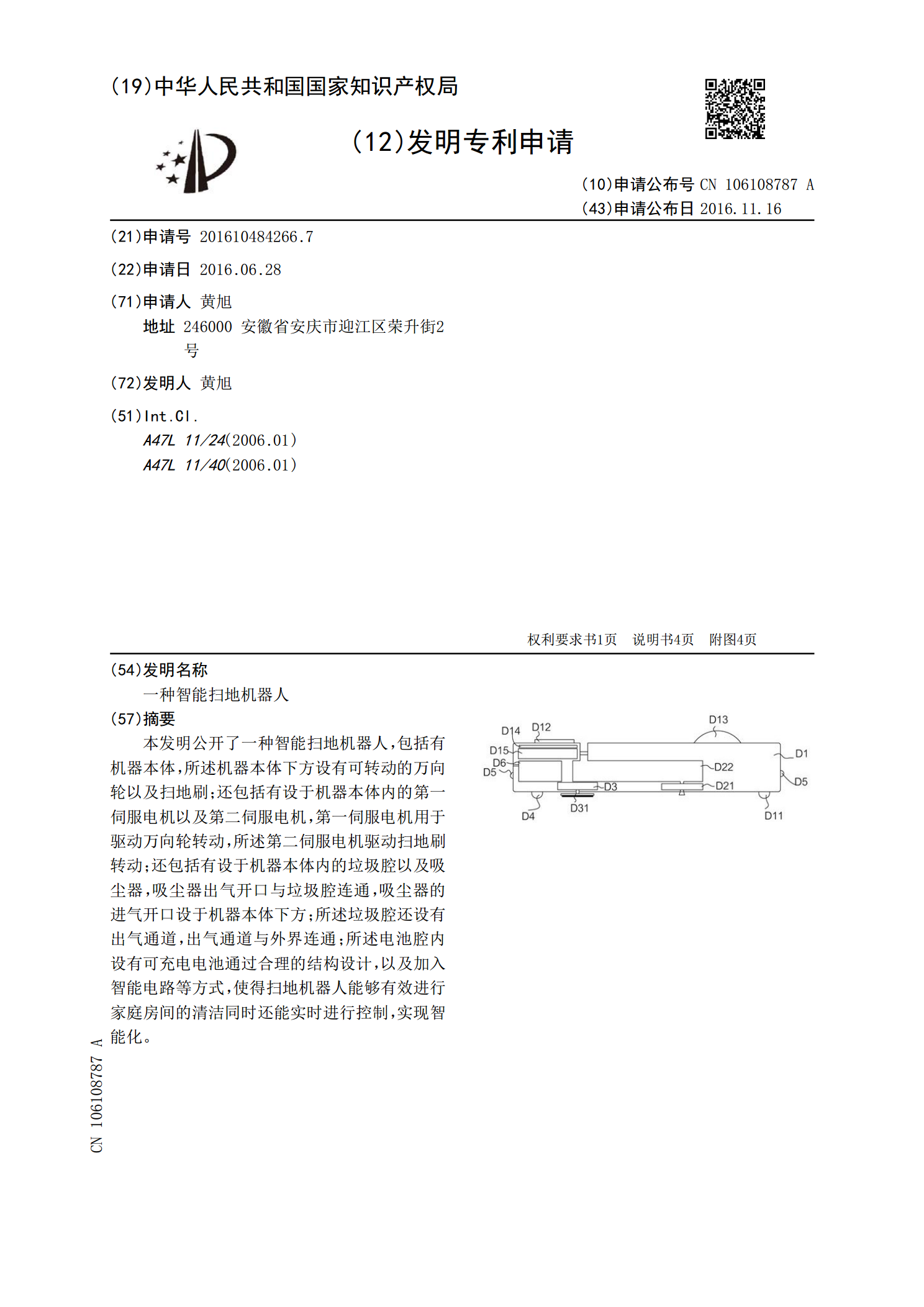
本发明公开了一种智能扫地机器人,包括有机器本体,所述机器本体下方设有可转动的万向轮以及扫地刷;还包括有设于机器本体内的第一伺服电机以及第二伺服电机,第一伺服电机用于驱动万向轮转动,所述第二伺服电机驱动扫地刷转动;还包括有设于机器本体内的垃圾腔以及吸尘器,吸尘器出气开口与垃圾腔连通,吸尘器的进气开口设于机器本体下方;所述垃圾腔还设有出气通道,出气通道与外界连通;所述电池腔内设有可充电电池通过合理的结构设计,以及加入智能电路等方式,使得扫地机器人能够有效进行家庭房间的清洁同时还能实时进行控制,实现智能化。
一种智能扫地机器人.pdf
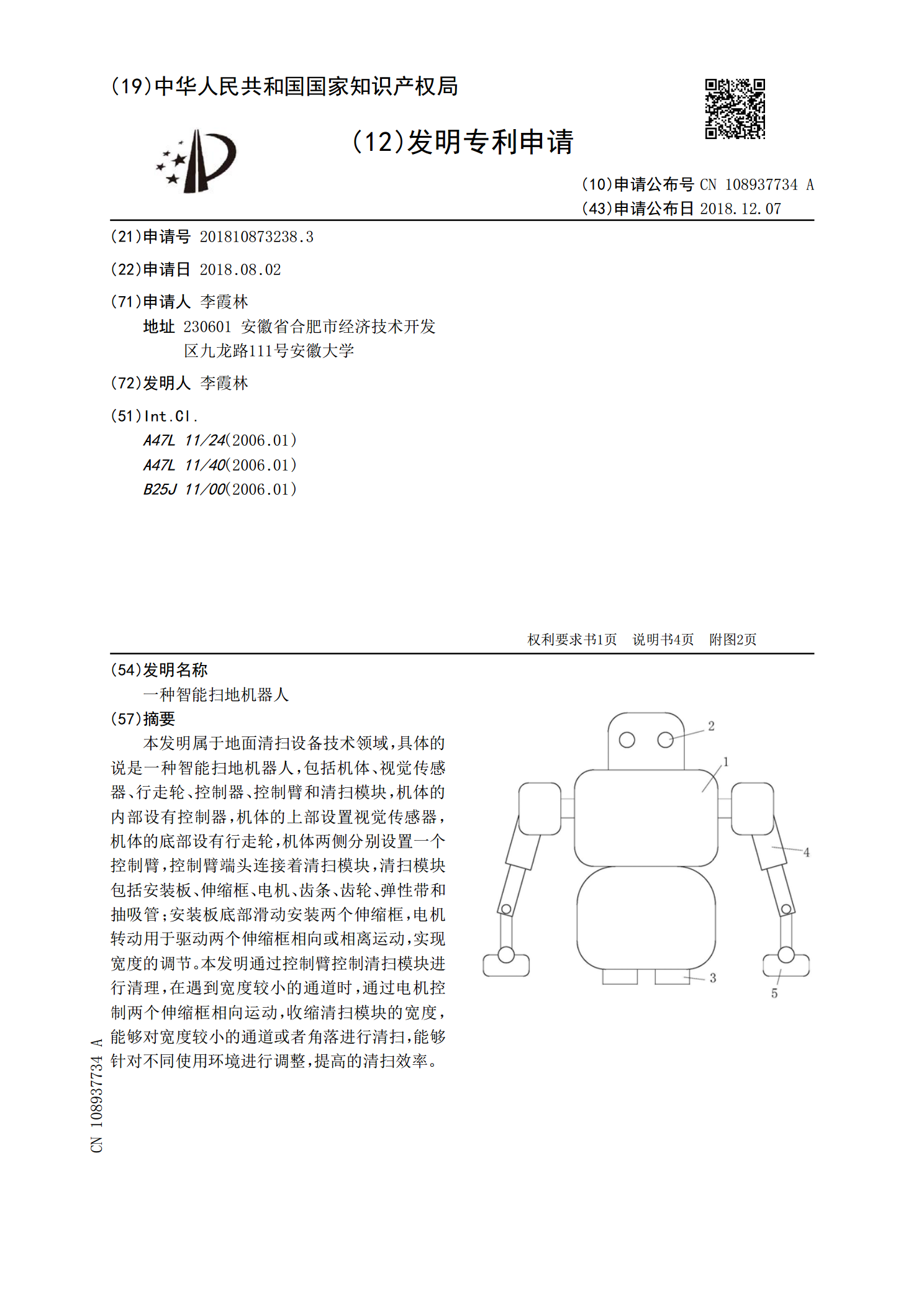
本发明属于地面清扫设备技术领域,具体的说是一种智能扫地机器人,包括机体、视觉传感器、行走轮、控制器、控制臂和清扫模块,机体的内部设有控制器,机体的上部设置视觉传感器,机体的底部设有行走轮,机体两侧分别设置一个控制臂,控制臂端头连接着清扫模块,清扫模块包括安装板、伸缩框、电机、齿条、齿轮、弹性带和抽吸管;安装板底部滑动安装两个伸缩框,电机转动用于驱动两个伸缩框相向或相离运动,实现宽度的调节。本发明通过控制臂控制清扫模块进行清理,在遇到宽度较小的通道时,通过电机控制两个伸缩框相向运动,收缩清扫模块的宽度,能够