
水陆空三栖机器人.pdf

梅雪****67


1/9
2/9
3/9
4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
水陆空三栖机器人.pdf
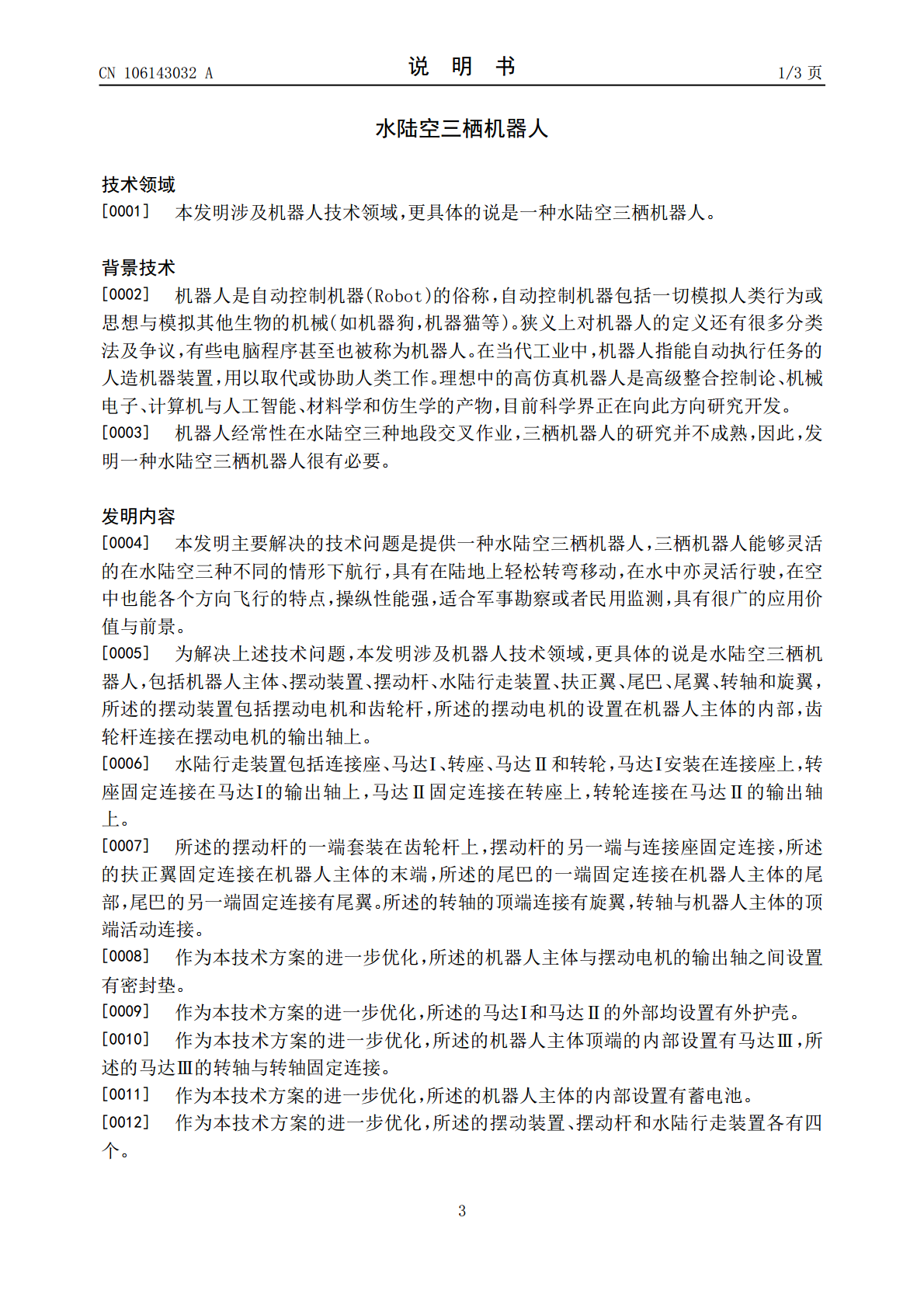
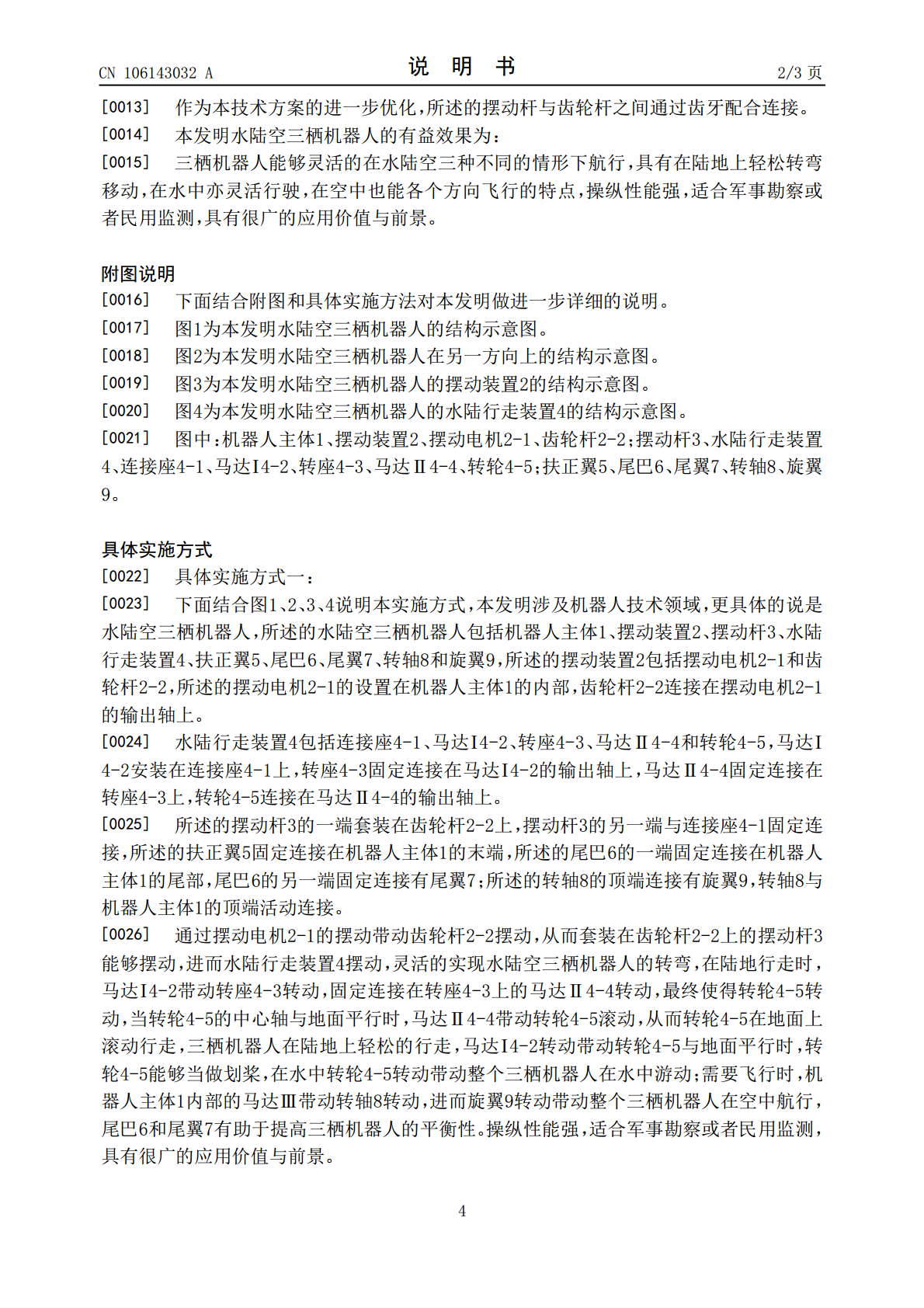
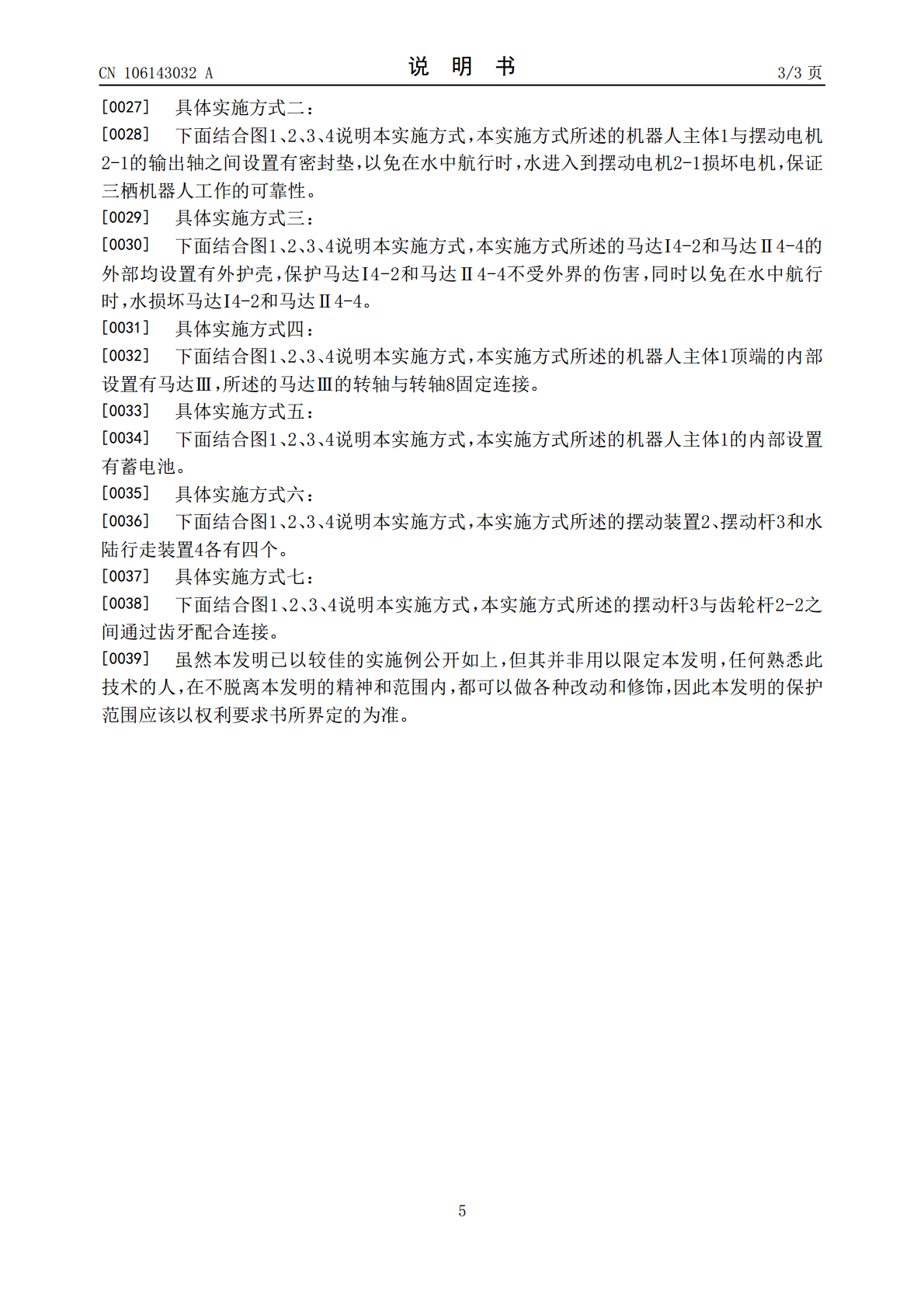
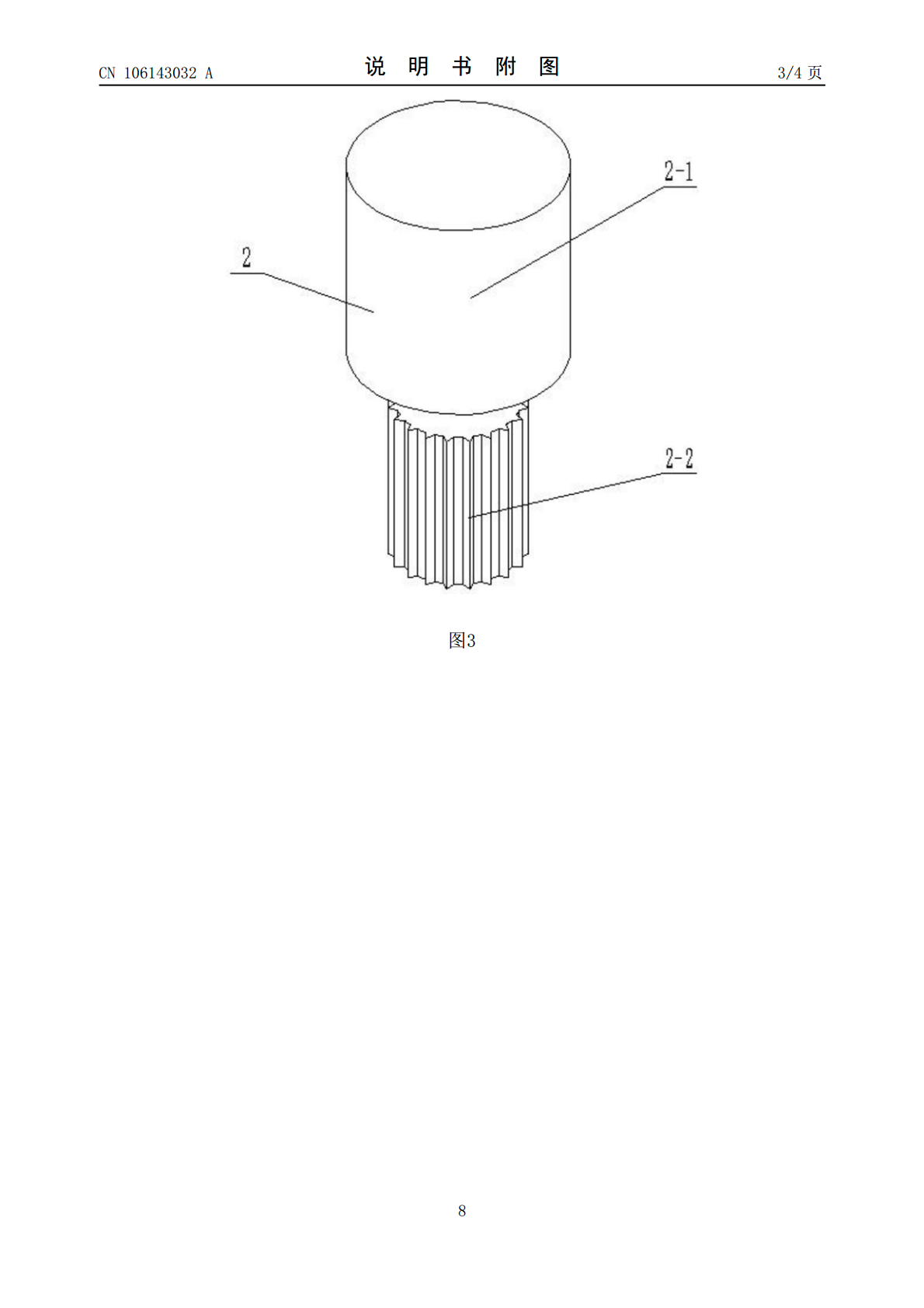
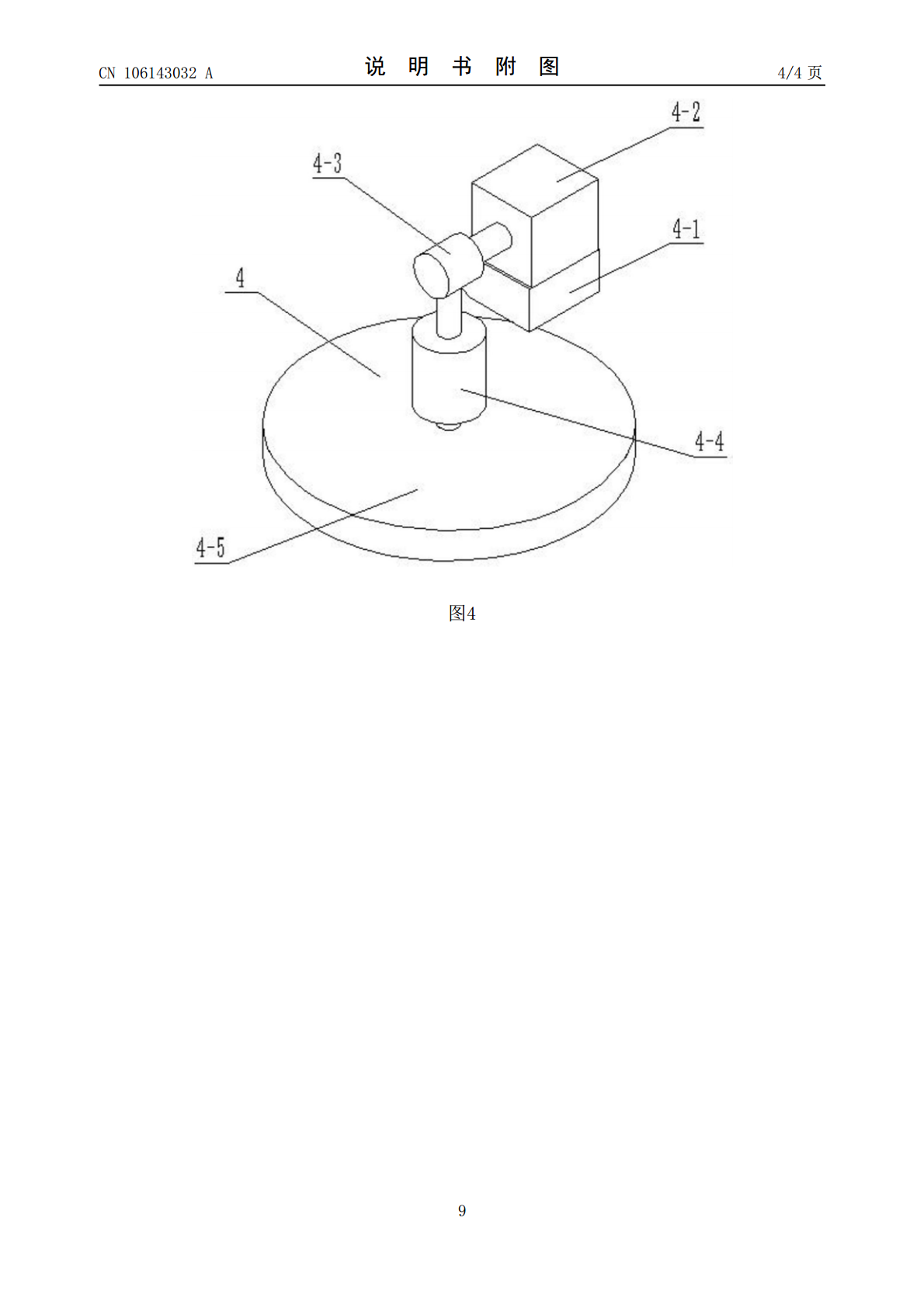
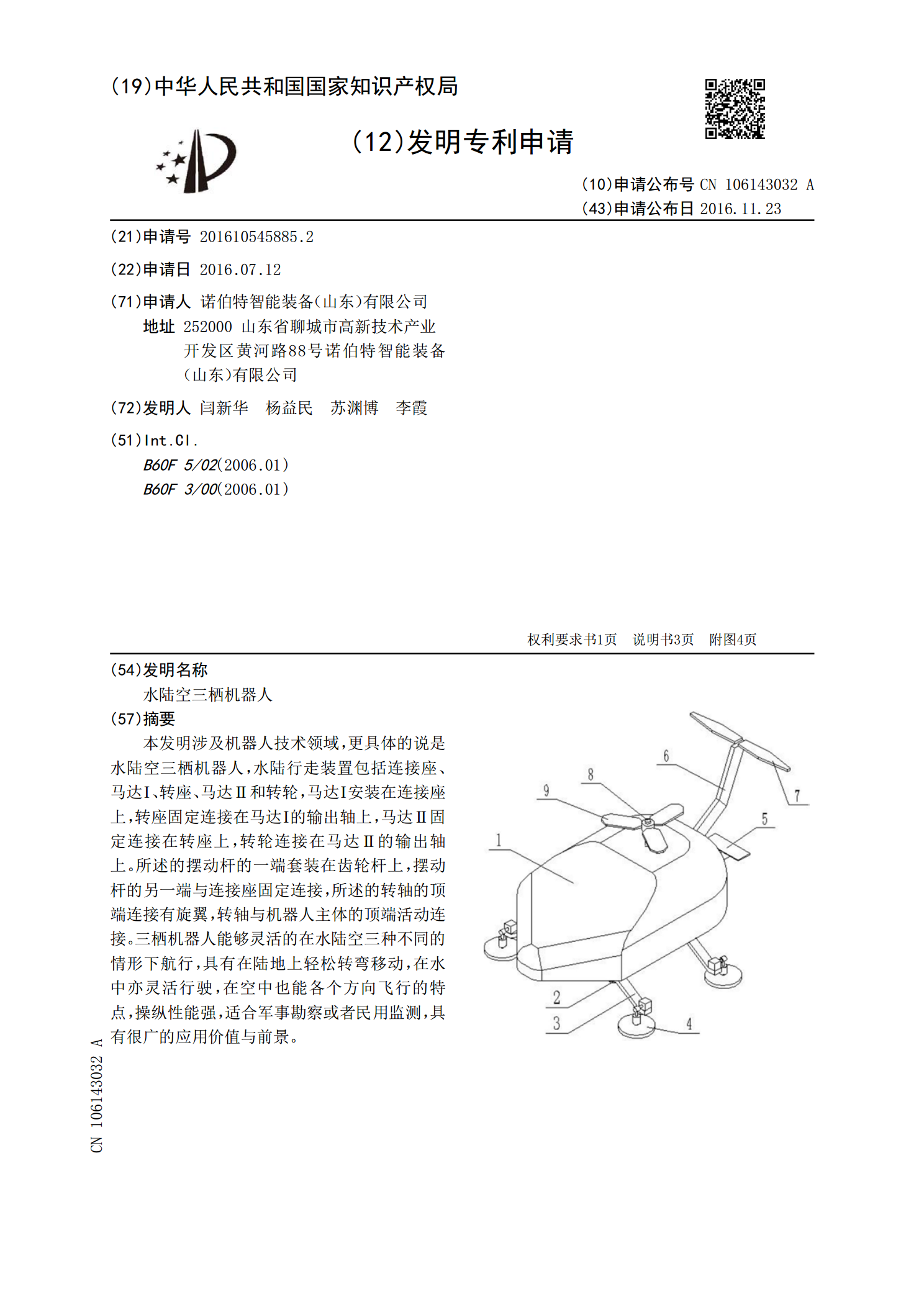
本发明涉及机器人技术领域,更具体的说是水陆空三栖机器人,水陆行走装置包括连接座、马达Ⅰ、转座、马达Ⅱ和转轮,马达Ⅰ安装在连接座上,转座固定连接在马达Ⅰ的输出轴上,马达Ⅱ固定连接在转座上,转轮连接在马达Ⅱ的输出轴上。所述的摆动杆的一端套装在齿轮杆上,摆动杆的另一端与连接座固定连接,所述的转轴的顶端连接有旋翼,转轴与机器人主体的顶端活动连接。三栖机器人能够灵活的在水陆空三种不同的情形下航行,具有在陆地上轻松转弯移动,在水中亦灵活行驶,在空中也能各个方向飞行的特点,操纵性能强,适合军事勘察或者民用监测,具有很广
水陆空三栖类轮式移动机器人.pdf
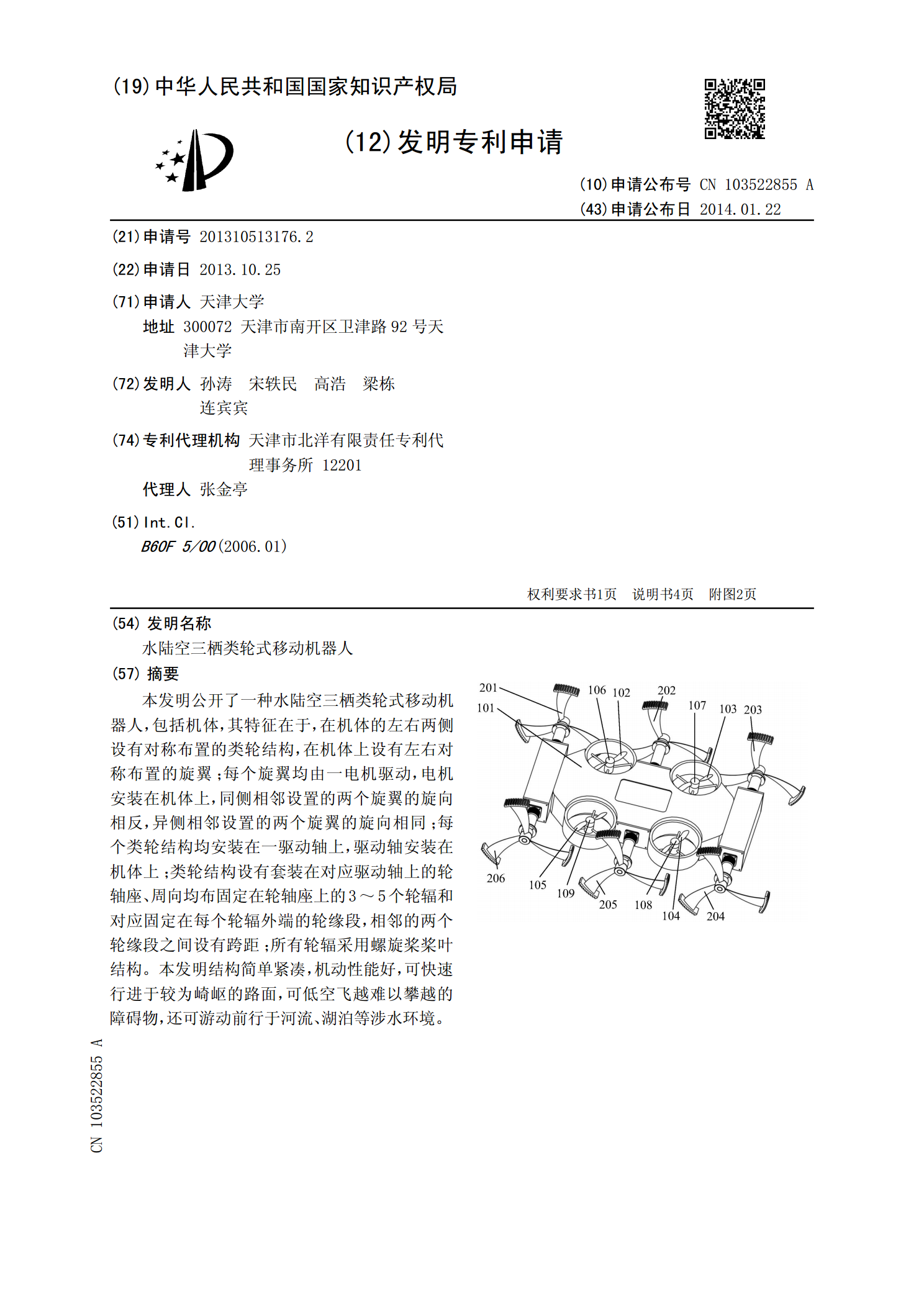
本发明公开了一种水陆空三栖类轮式移动机器人,包括机体,其特征在于,在机体的左右两侧设有对称布置的类轮结构,在机体上设有左右对称布置的旋翼;每个旋翼均由一电机驱动,电机安装在机体上,同侧相邻设置的两个旋翼的旋向相反,异侧相邻设置的两个旋翼的旋向相同;每个类轮结构均安装在一驱动轴上,驱动轴安装在机体上;类轮结构设有套装在对应驱动轴上的轮轴座、周向均布固定在轮轴座上的3~5个轮辐和对应固定在每个轮辐外端的轮缘段,相邻的两个轮缘段之间设有跨距;所有轮辐采用螺旋桨桨叶结构。本发明结构简单紧凑,机动性能好,可快速行进
水陆空三栖汽车.pdf
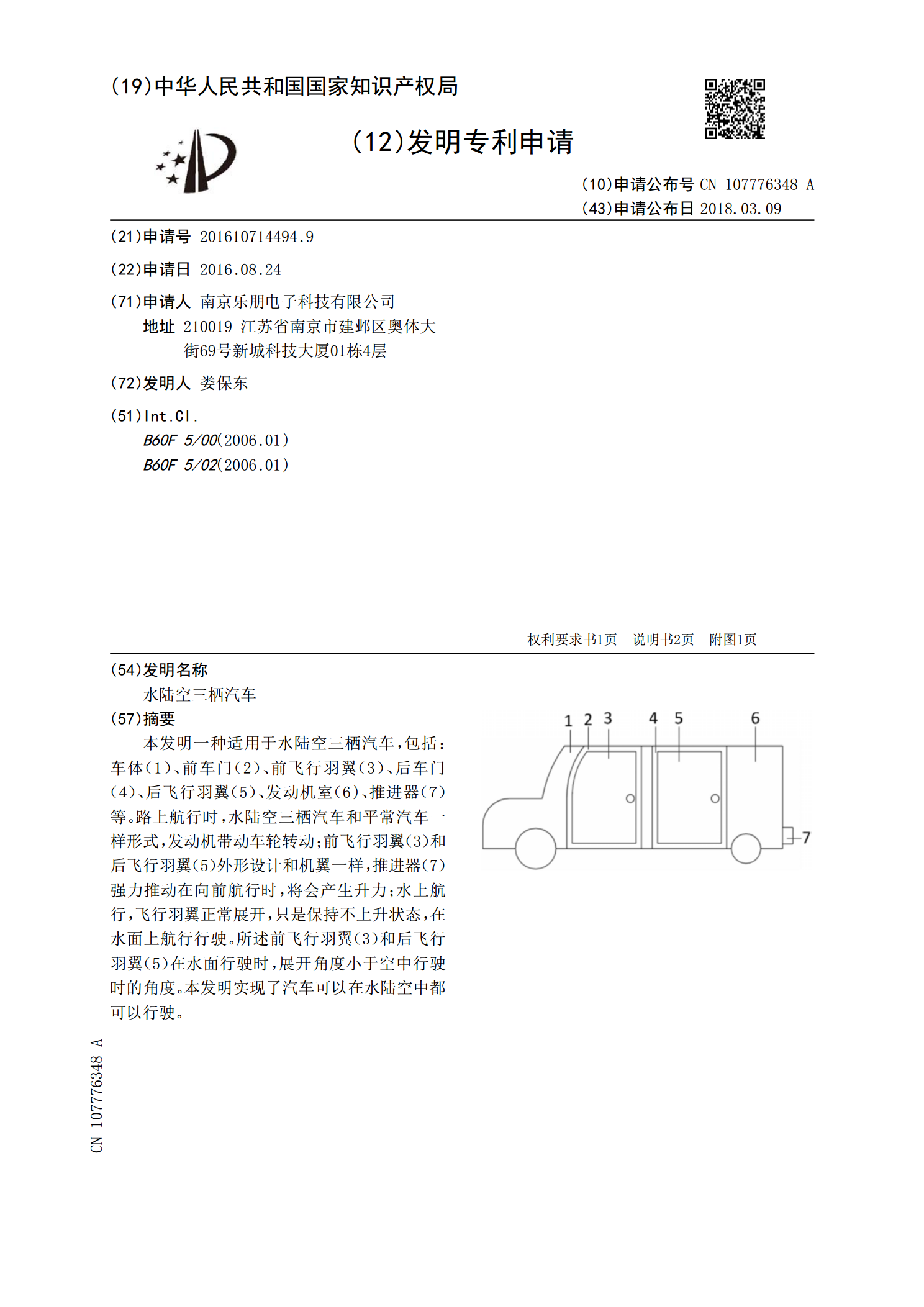
本发明一种适用于水陆空三栖汽车,包括:车体(1)、前车门(2)、前飞行羽翼(3)、后车门(4)、后飞行羽翼(5)、发动机室(6)、推进器(7)等。路上航行时,水陆空三栖汽车和平常汽车一样形式,发动机带动车轮转动;前飞行羽翼(3)和后飞行羽翼(5)外形设计和机翼一样,推进器(7)强力推动在向前航行时,将会产生升力;水上航行,飞行羽翼正常展开,只是保持不上升状态,在水面上航行行驶。所述前飞行羽翼(3)和后飞行羽翼(5)在水面行驶时,展开角度小于空中行驶时的角度。本发明实现了汽车可以在水陆空中都可以行驶。

一种三旋翼轮式水陆空三栖机器人.pdf
本发明公开了一种三旋翼轮式水陆空三栖机器人。该机器人包括旋转翼组件、驱动轮组件、本体、调节翼组件、调压组件、万向轮、控制系统及传感器;所述旋转翼组件、调节翼组件均安装在本体上;驱动轮组件安装在本体左右两侧;调压组件安装在本体底部,通过控制本体体积的变化调节浮力大小;万向轮设置在本体末端;所述控制系统及各种传感器安装在本体上,用于多栖机器人的环境采集及控制;地面模式时三旋翼的两个旋翼自动折叠,另一个旋翼通过变结构提供地面辅助牵引力;水中模式时通过调压组件和其中两个旋翼控制潜水深度;空中模式时通过三个旋翼和两
一种水陆空三栖旋翼机器人及其工作方法.pdf
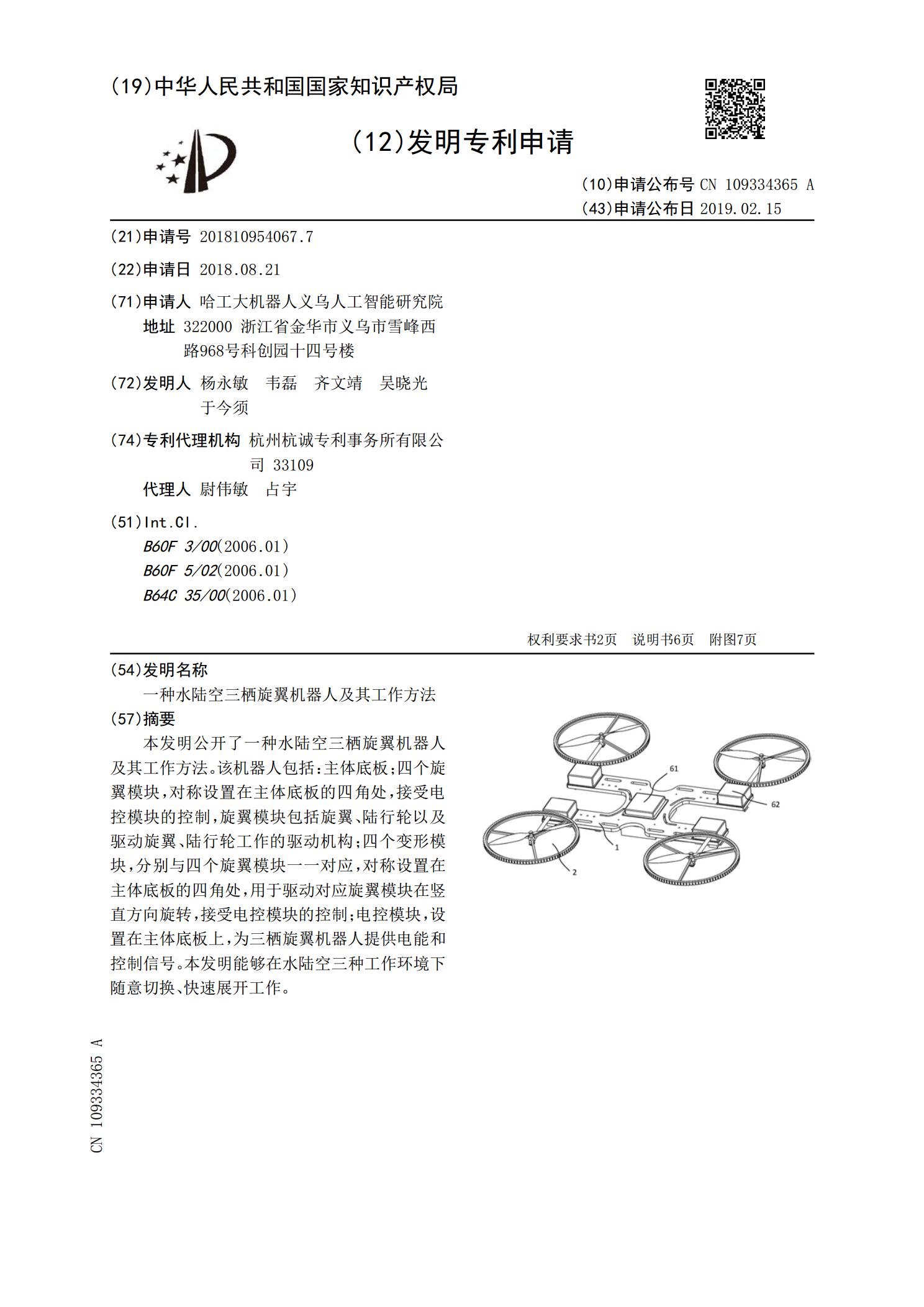
本发明公开了一种水陆空三栖旋翼机器人及其工作方法。该机器人包括:主体底板;四个旋翼模块,对称设置在主体底板的四角处,接受电控模块的控制,旋翼模块包括旋翼、陆行轮以及驱动旋翼、陆行轮工作的驱动机构;四个变形模块,分别与四个旋翼模块一一对应,对称设置在主体底板的四角处,用于驱动对应旋翼模块在竖直方向旋转,接受电控模块的控制;电控模块,设置在主体底板上,为三栖旋翼机器人提供电能和控制信号。本发明能够在水陆空三种工作环境下随意切换、快速展开工作。