
一种基于视觉的越障机器人.pdf

新槐****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉的越障机器人.pdf
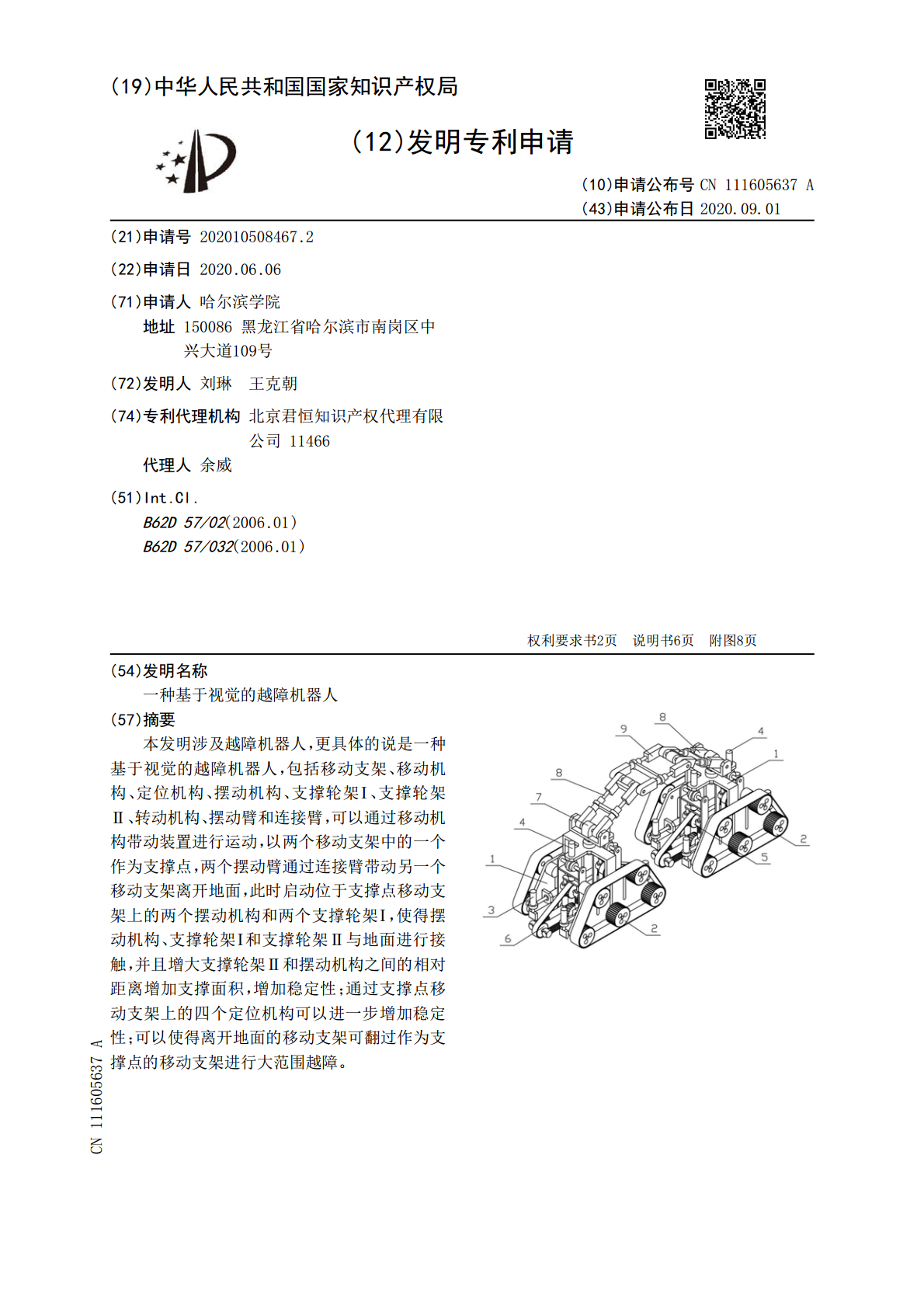
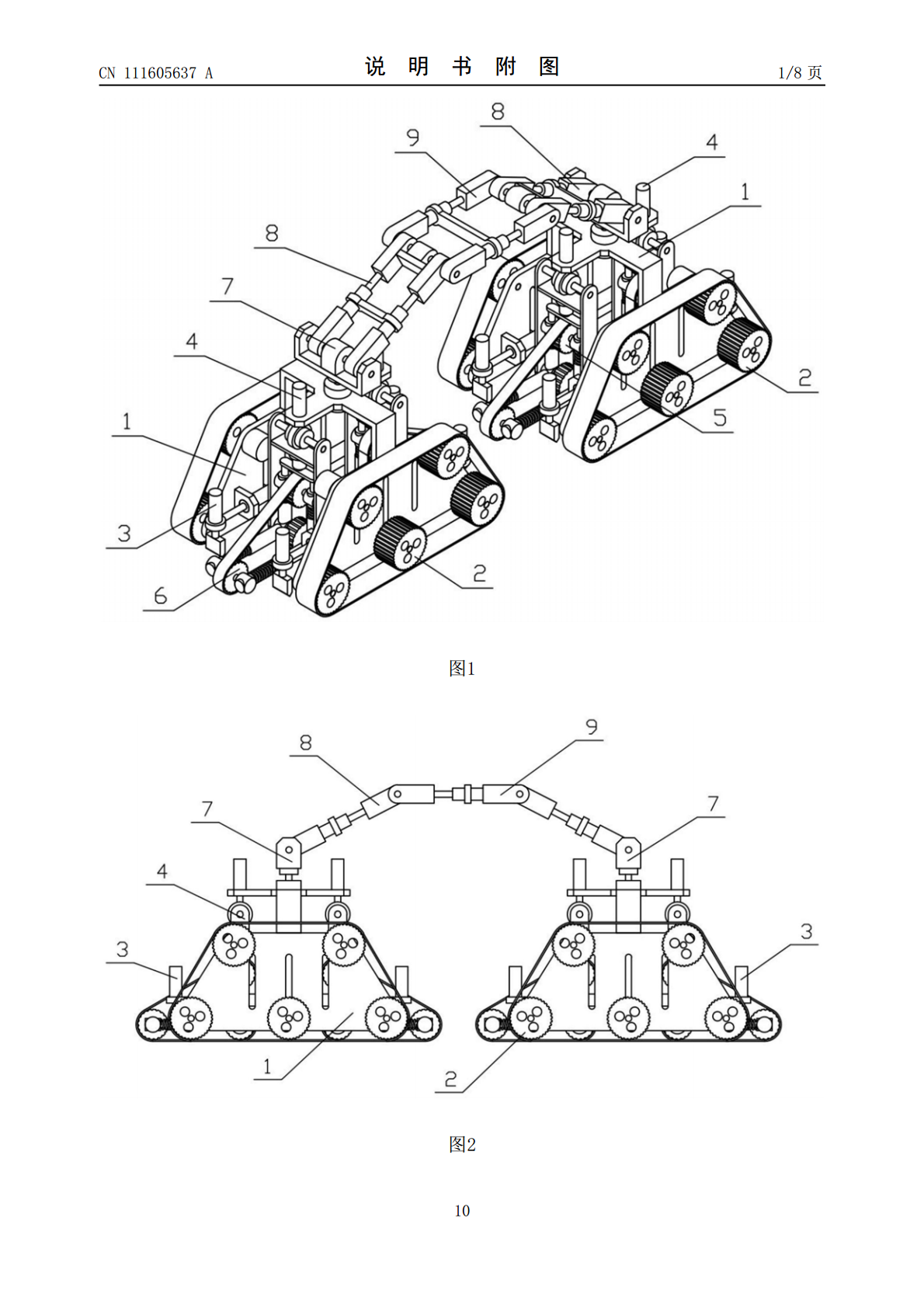
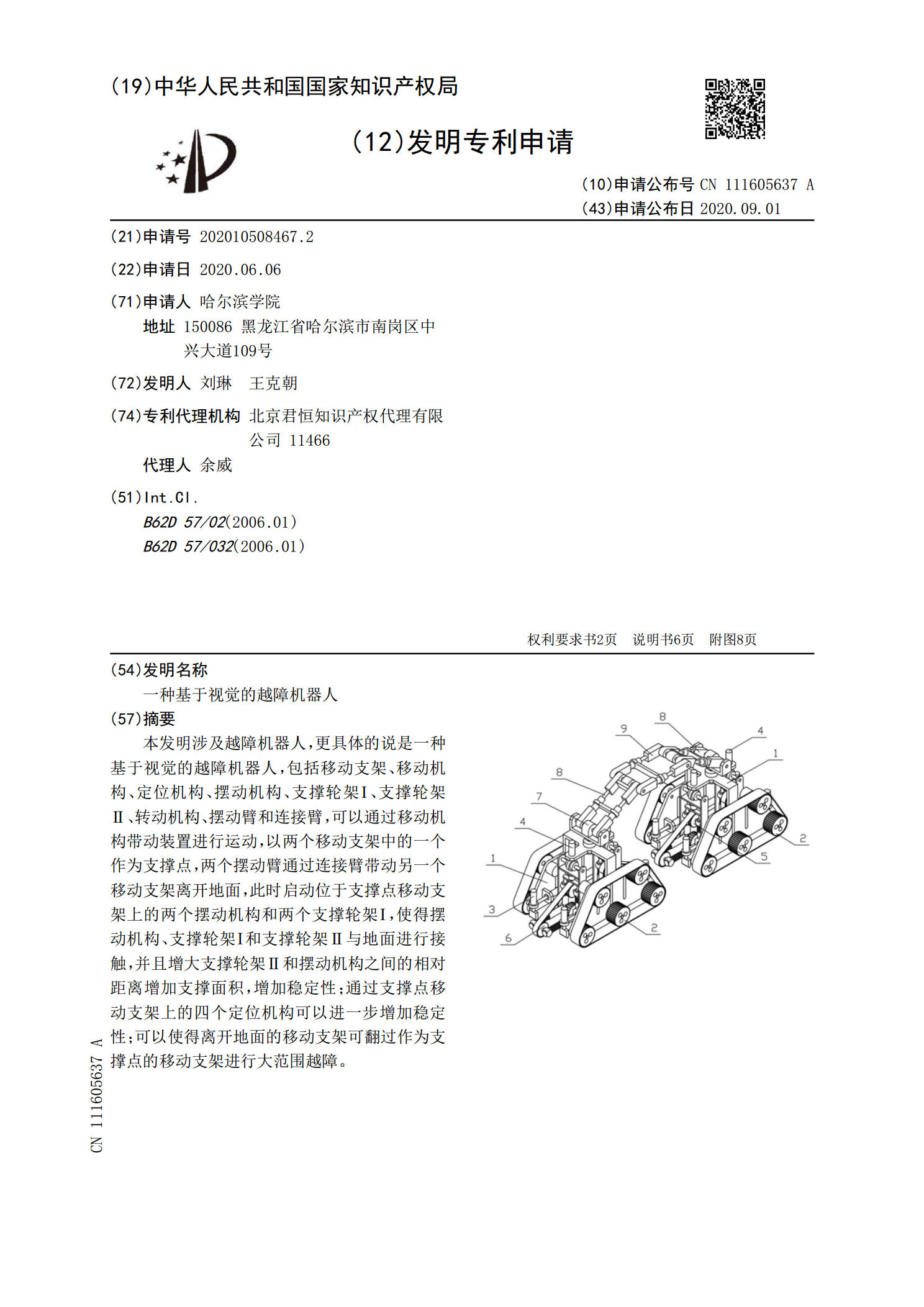
本发明涉及越障机器人,更具体的说是一种基于视觉的越障机器人,包括移动支架、移动机构、定位机构、摆动机构、支撑轮架Ⅰ、支撑轮架Ⅱ、转动机构、摆动臂和连接臂,可以通过移动机构带动装置进行运动,以两个移动支架中的一个作为支撑点,两个摆动臂通过连接臂带动另一个移动支架离开地面,此时启动位于支撑点移动支架上的两个摆动机构和两个支撑轮架Ⅰ,使得摆动机构、支撑轮架Ⅰ和支撑轮架Ⅱ与地面进行接触,并且增大支撑轮架Ⅱ和摆动机构之间的相对距离增加支撑面积,增加稳定性;通过支撑点移动支架上的四个定位机构可以进一步增加稳定性;可以

基于视觉的电力线除冰机器人越障抓线控制.docx
基于视觉的电力线除冰机器人越障抓线控制基于视觉的电力线除冰机器人越障抓线控制摘要:随着科技的不断发展,机器人技术在各个领域得到广泛应用,其中包括电力工业。在电力线路的维护和冰雪天气中,传统的人工除冰工作面临着高风险和低效率的问题。为了提高电力线路的安全性和运行效率,本文基于视觉的电力线除冰机器人越障抓线控制进行研究,旨在开发一种能够自主进行电力线除冰作业的机器人系统。关键词:机器人,电力线除冰,越障,抓线,视觉控制一、引言随着电力工业的发展,电力线路的维护和冰雪天气中变得越来越重要。传统的人工除冰工作存在
一种基于气动的越障排爆机器人.pdf
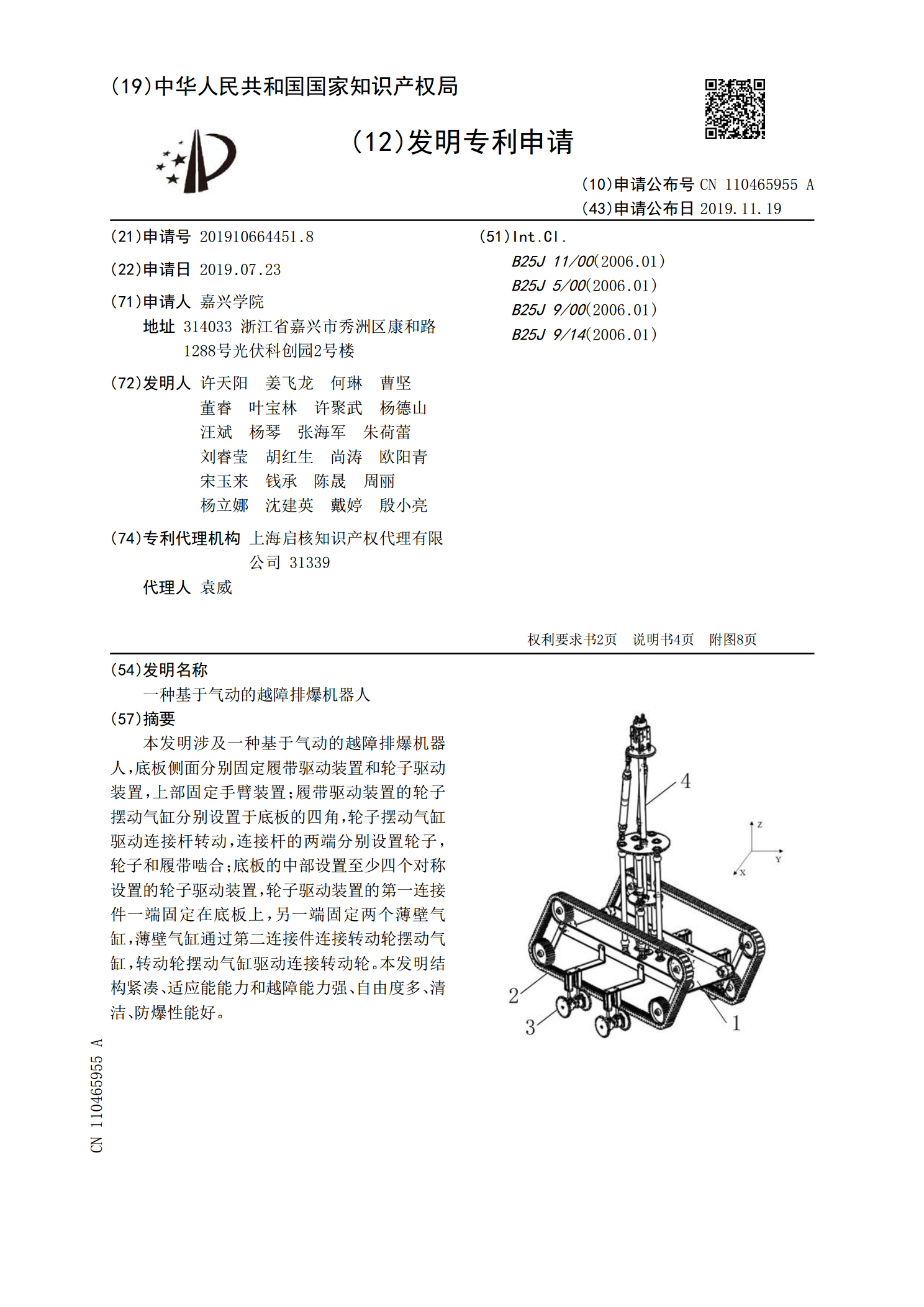
本发明涉及一种基于气动的越障排爆机器人,底板侧面分别固定履带驱动装置和轮子驱动装置,上部固定手臂装置;履带驱动装置的轮子摆动气缸分别设置于底板的四角,轮子摆动气缸驱动连接杆转动,连接杆的两端分别设置轮子,轮子和履带啮合;底板的中部设置至少四个对称设置的轮子驱动装置,轮子驱动装置的第一连接件一端固定在底板上,另一端固定两个薄壁气缸,薄壁气缸通过第二连接件连接转动轮摆动气缸,转动轮摆动气缸驱动连接转动轮。本发明结构紧凑、适应能能力和越障能力强、自由度多、清洁、防爆性能好。
一种基于并联机构的越障救援机器人.pdf
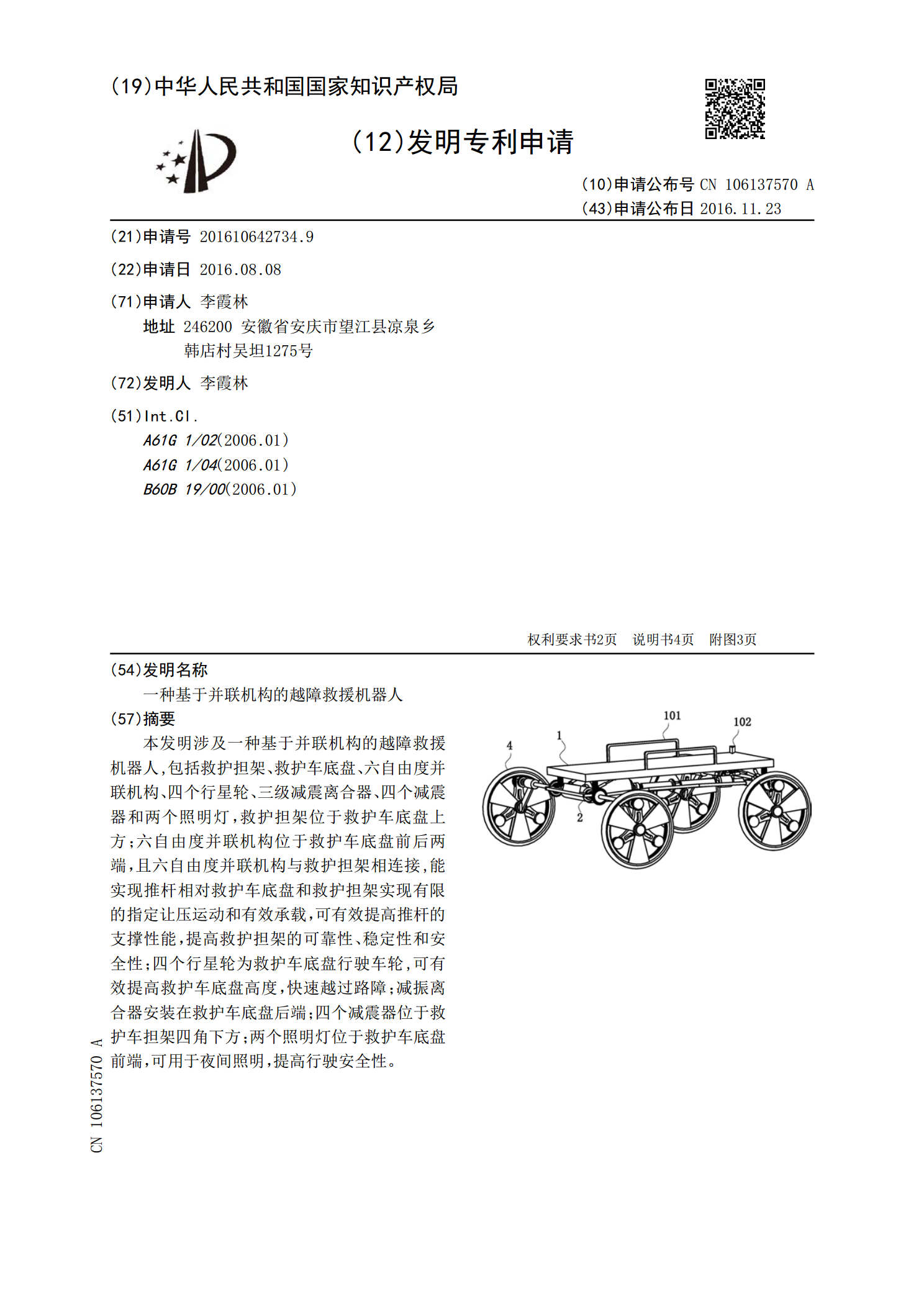
本发明涉及一种基于并联机构的越障救援机器人,包括救护担架、救护车底盘、六自由度并联机构、四个行星轮、三级减震离合器、四个减震器和两个照明灯,救护担架位于救护车底盘上方;六自由度并联机构位于救护车底盘前后两端,且六自由度并联机构与救护担架相连接,能实现推杆相对救护车底盘和救护担架实现有限的指定让压运动和有效承载,可有效提高推杆的支撑性能,提高救护担架的可靠性、稳定性和安全性;四个行星轮为救护车底盘行驶车轮,可有效提高救护车底盘高度,快速越过路障;减振离合器安装在救护车底盘后端;四个减震器位于救护车担架四角下
一种越障机器人.pdf
本发明揭示了一种越障机器人包括直角腿支架、传动机构、前轮、履带轮、电机和电源等部件,所述直角腿机构包括前直角腿支架和后直角腿支架;所述前直角腿支架连接三个前轮和前轴,所述后直角腿支架连接两个履带轮和后轴;所述传动机构包括涡轮蜗杆传动机构和锥齿轮传动机构;所述电机包括步进电机和直流无刷电机;所述电源通过导线连接电机;所述传动机构主要将电机的转速传动到前轮和履带轮上,实现一种越障机器人的运动性能。本发明结构上构思了一种空心轴结构,所有部件均易于加工,成本低廉,能够很好的适应各种复杂路况。