
马达驱动控制装置.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
马达驱动控制装置.pdf
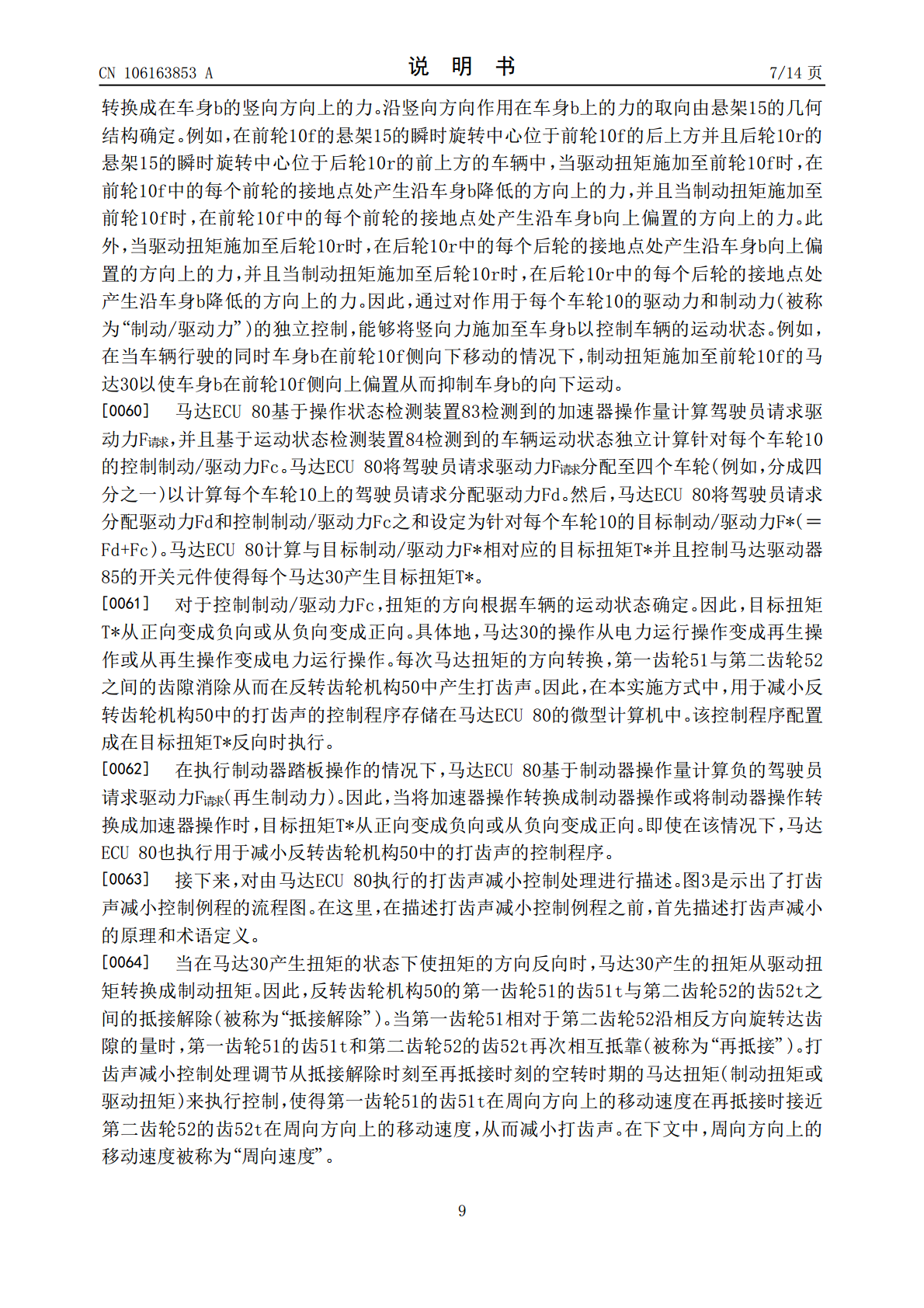
本公开提供了一种马达驱动控制装置,该马达驱动控制装置能够在不增大减速器的尺寸和部件的数量的情况下减小减速器中产生的打齿声。马达ECU控制马达以在目标扭矩(T*)反向时(在时刻t1)产生反向设定扭矩(Tn)。马达ECU随后计算反转齿轮机构中的齿隙(B),并且将马达产生反向设定扭矩(Tn)的时期(D1)和马达产生返回设定扭矩(Tp)的时期(D2)设定成使得当前时刻的齿隙(B)等于预估相对速度(V2‑V1)的直至再抵接时刻的时间积分值(对应于面积A)。以这种方式,在反转齿轮机构中的第一齿轮的齿的周向速度和第二齿
马达驱动装置.pdf
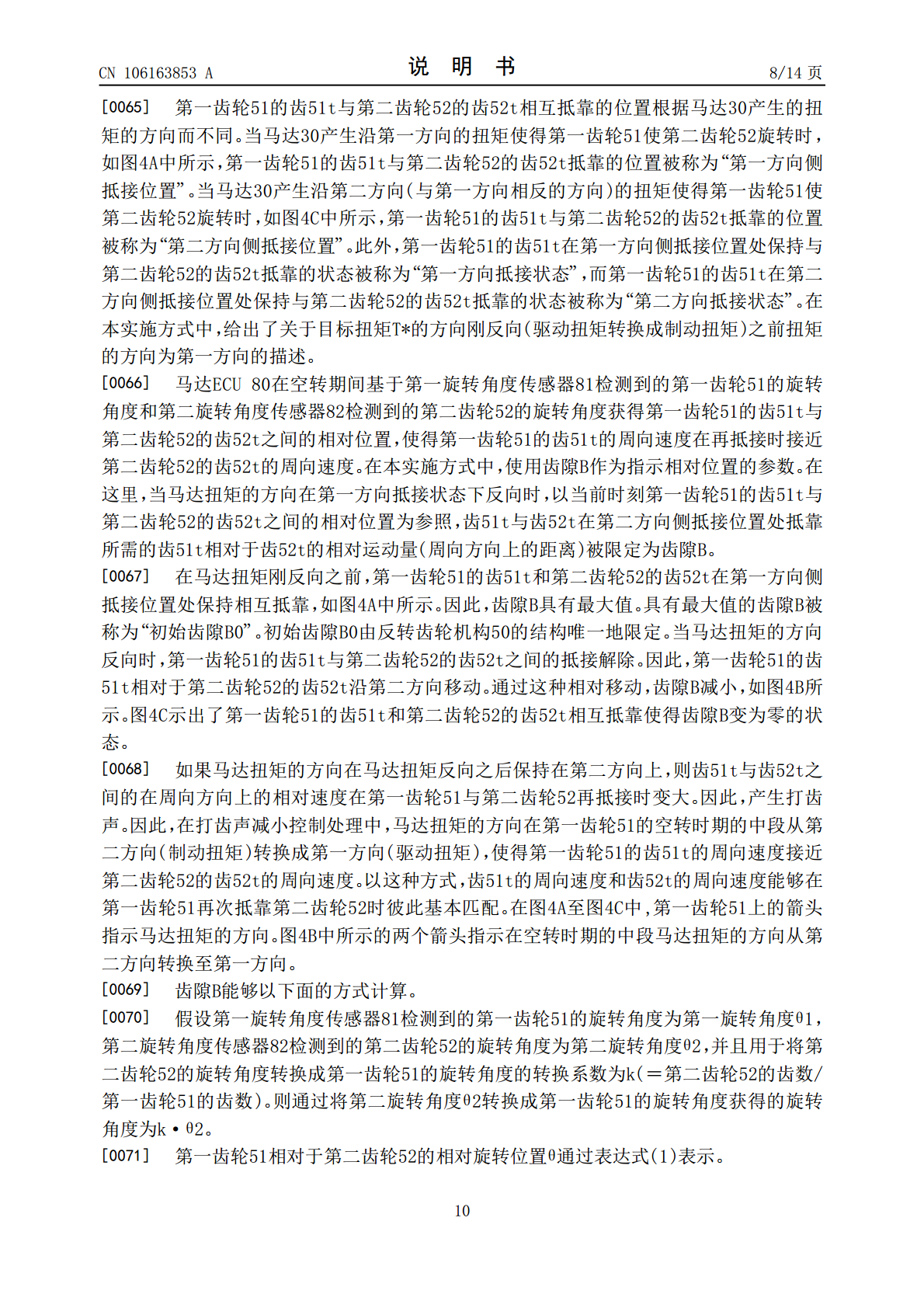
马达驱动装置(1)具有拖曳臂(2)和马达(3),其中,所述拖曳臂(2)沿车辆前后方向延伸,在其前侧形成有经由橡胶衬套(5)连结于车身的车身侧安装部(6),在其后侧形成有支承后轮(71)的车轮侧支承部(7);所述马达(3)支承于拖曳臂(2)并驱动后轮(71),马达驱动装置(1)的特征在于,在从车宽方向上观察时,马达(3)配置于在车辆上下方向上与橡胶衬套(5)重叠的位置。
马达驱动装置.pdf
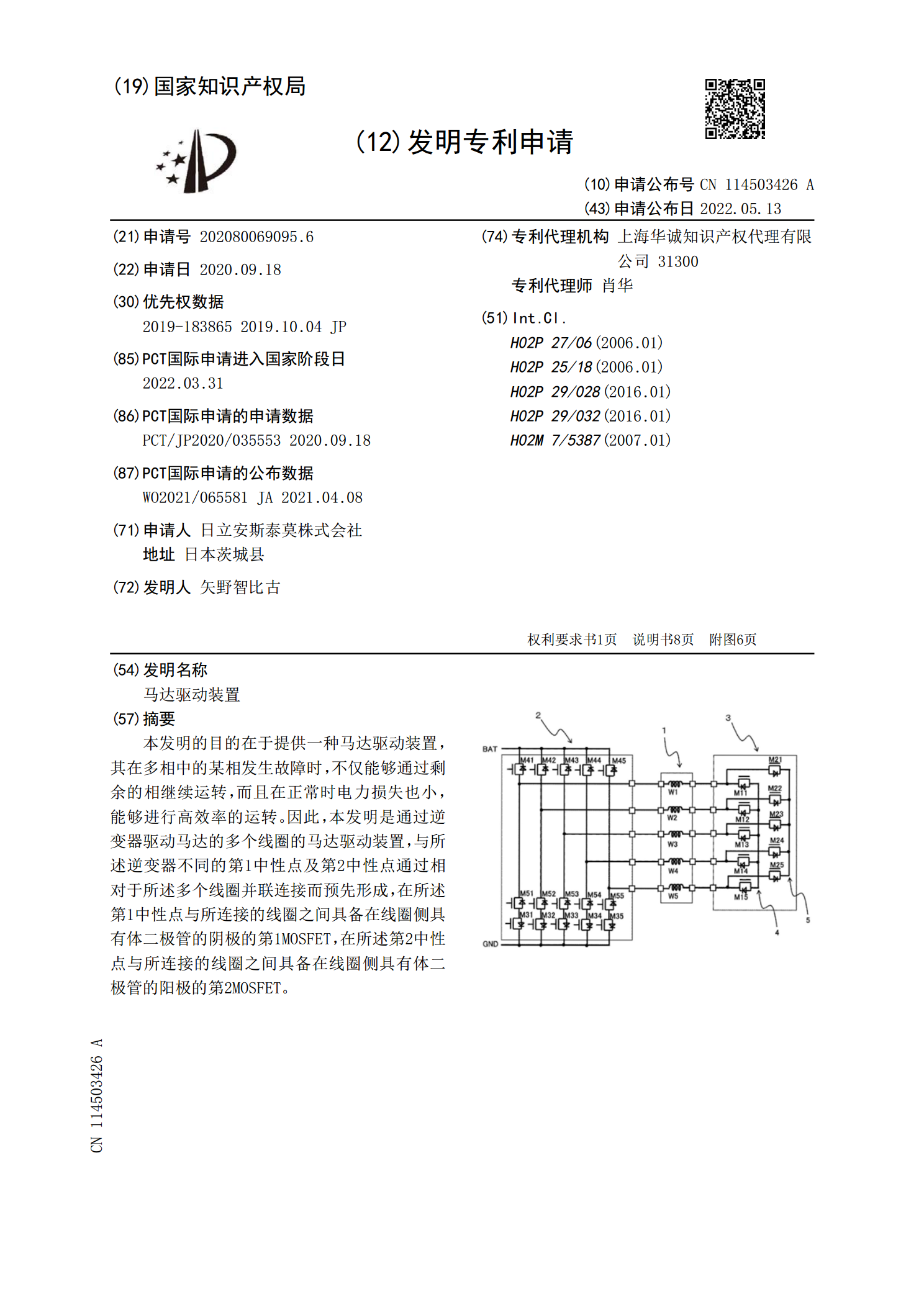
本发明的目的在于提供一种马达驱动装置,其在多相中的某相发生故障时,不仅能够通过剩余的相继续运转,而且在正常时电力损失也小,能够进行高效率的运转。因此,本发明是通过逆变器驱动马达的多个线圈的马达驱动装置,与所述逆变器不同的第1中性点及第2中性点通过相对于所述多个线圈并联连接而预先形成,在所述第1中性点与所连接的线圈之间具备在线圈侧具有体二极管的阴极的第1MOSFET,在所述第2中性点与所连接的线圈之间具备在线圈侧具有体二极管的阳极的第2MOSFET。

马达驱动装置.pdf
在用于失效保护的熔丝模块(22)中,熔丝电路元件(32)安装于熔丝电路基板(31),与由定子线圈的导线一端构成的导线端子部(36)连接。熔丝电路基板(31)具有通孔(33a)和焊盘部(33b)作为主端子(33),导线端子部(36)在插通于通孔(33a)之后被软钎焊或焊接。熔丝电路基板(31)由台状部(52)呈悬臂状支承,在主端子(33)周围,在与外壳(7)的面(51)之间确保空间(53)。在软钎焊或焊接时,由于空间(53)的存在,热不会散失,能够进行软钎焊或焊接。
液压马达驱动装置.pdf
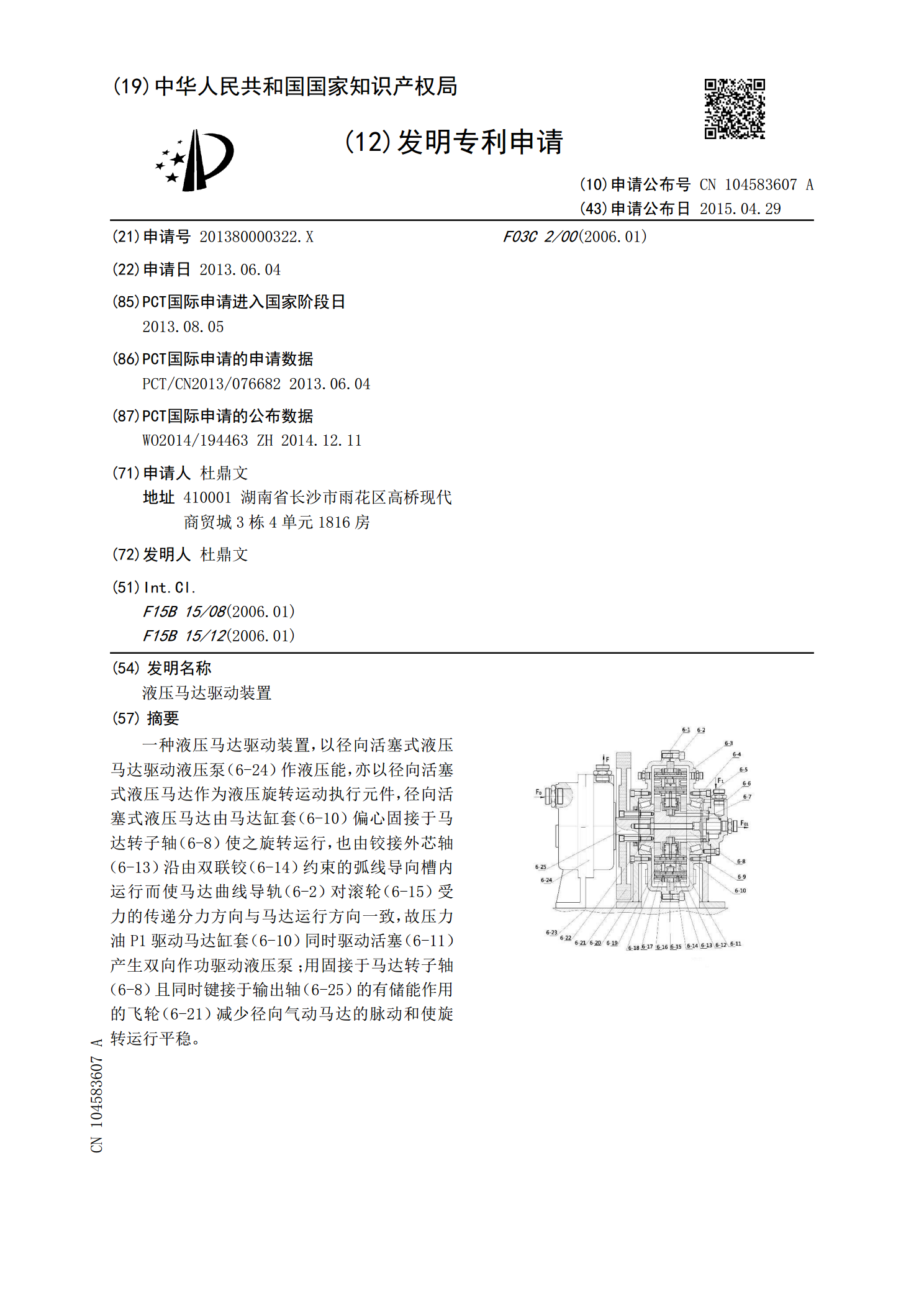
一种液压马达驱动装置,以径向活塞式液压马达驱动液压泵(6-24)作液压能,亦以径向活塞式液压马达作为液压旋转运动执行元件,径向活塞式液压马达由马达缸套(6-10)偏心固接于马达转子轴(6-8)使之旋转运行,也由铰接外芯轴(6-13)沿由双联铰(6-14)约束的弧线导向槽内运行而使马达曲线导轨(6-2)对滚轮(6-15)受力的传递分力方向与马达运行方向一致,故压力油P1驱动马达缸套(6-10)同时驱动活塞(6-11)产生双向作功驱动液压泵;用固接于马达转子轴(6-8)且同时键接于输出轴(6-25)的有储能作