
人工肌肉驱动且结构解耦的机器人关节.pdf

代瑶****zy

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

人工肌肉驱动且结构解耦的机器人关节.pdf
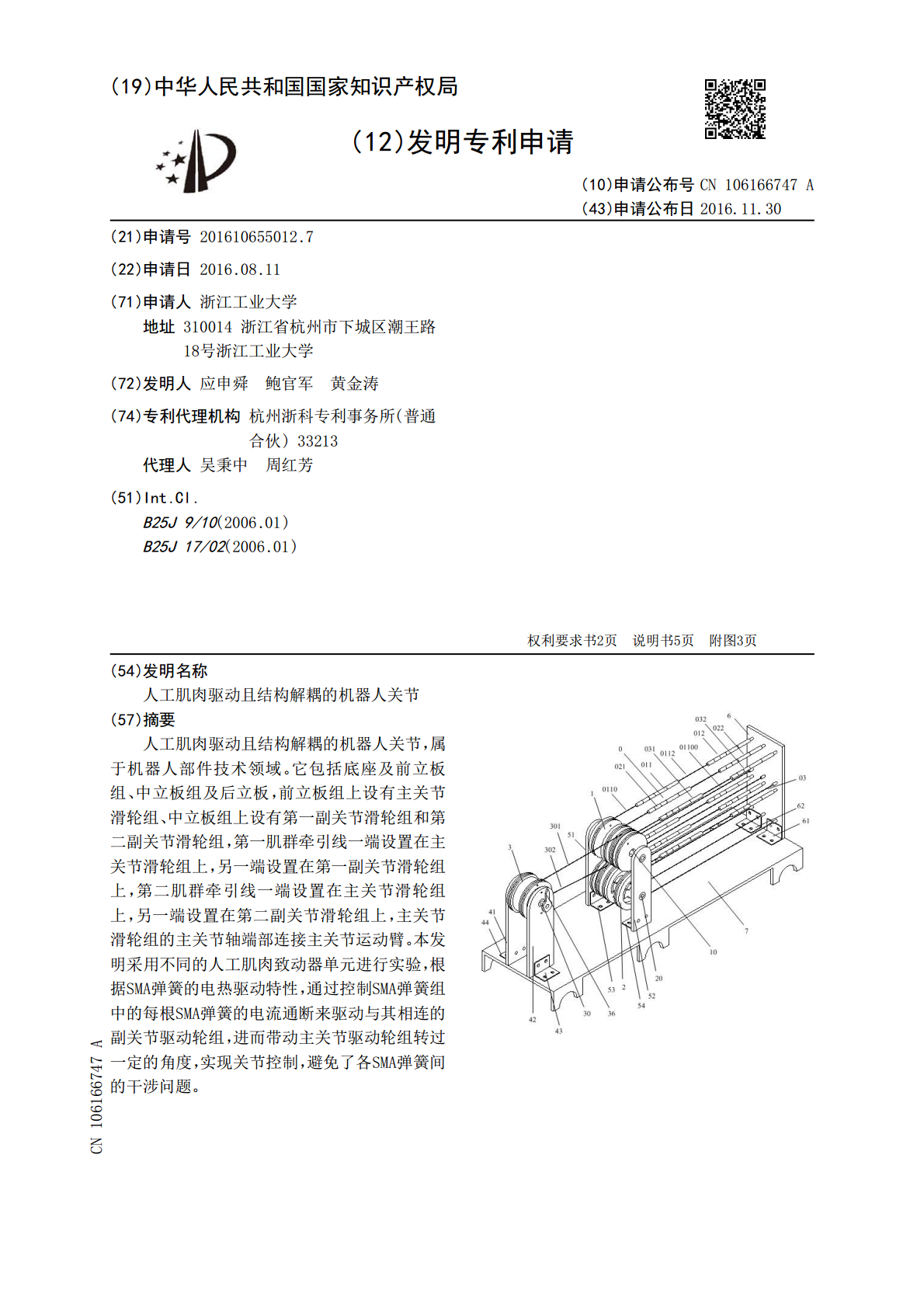
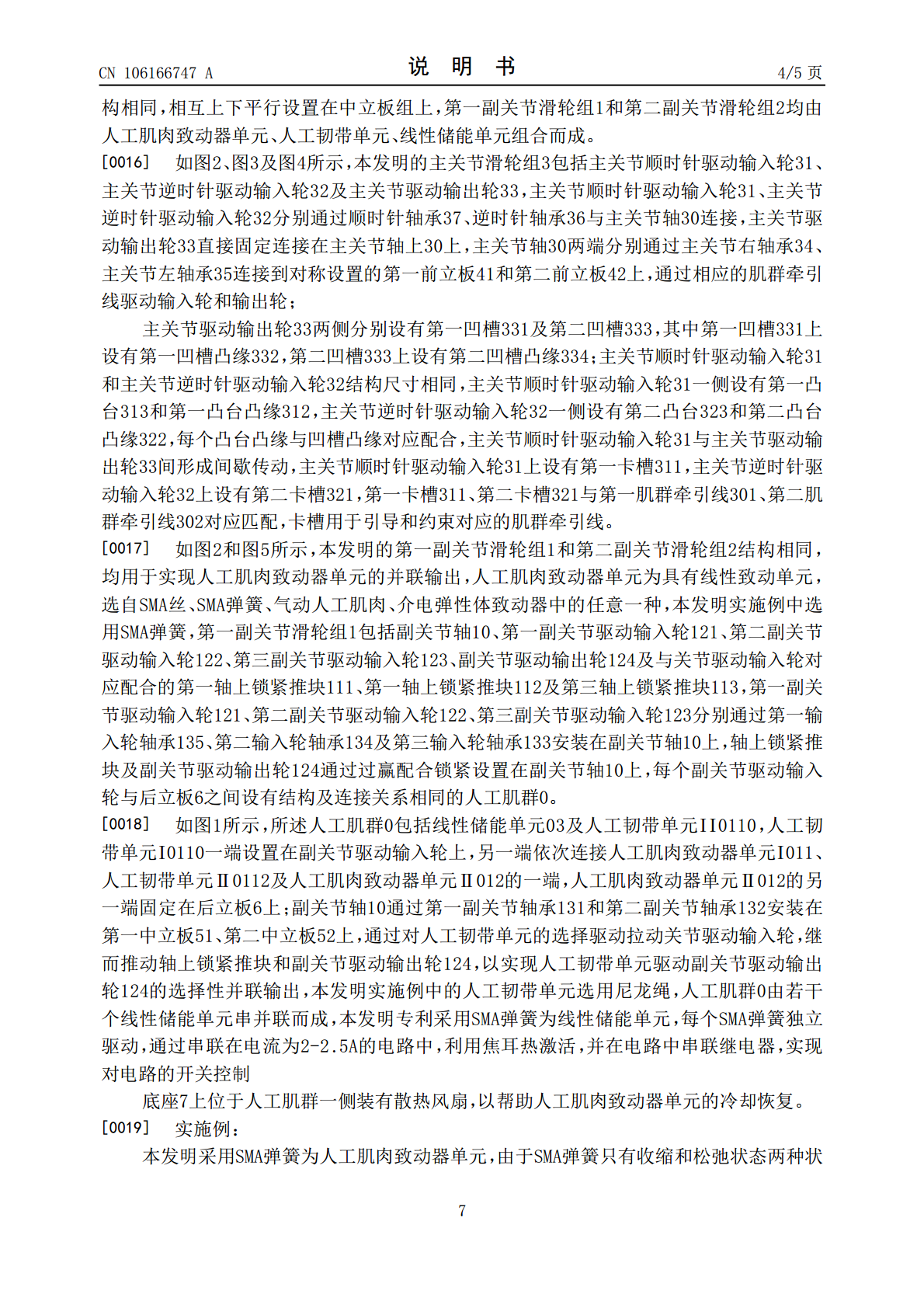
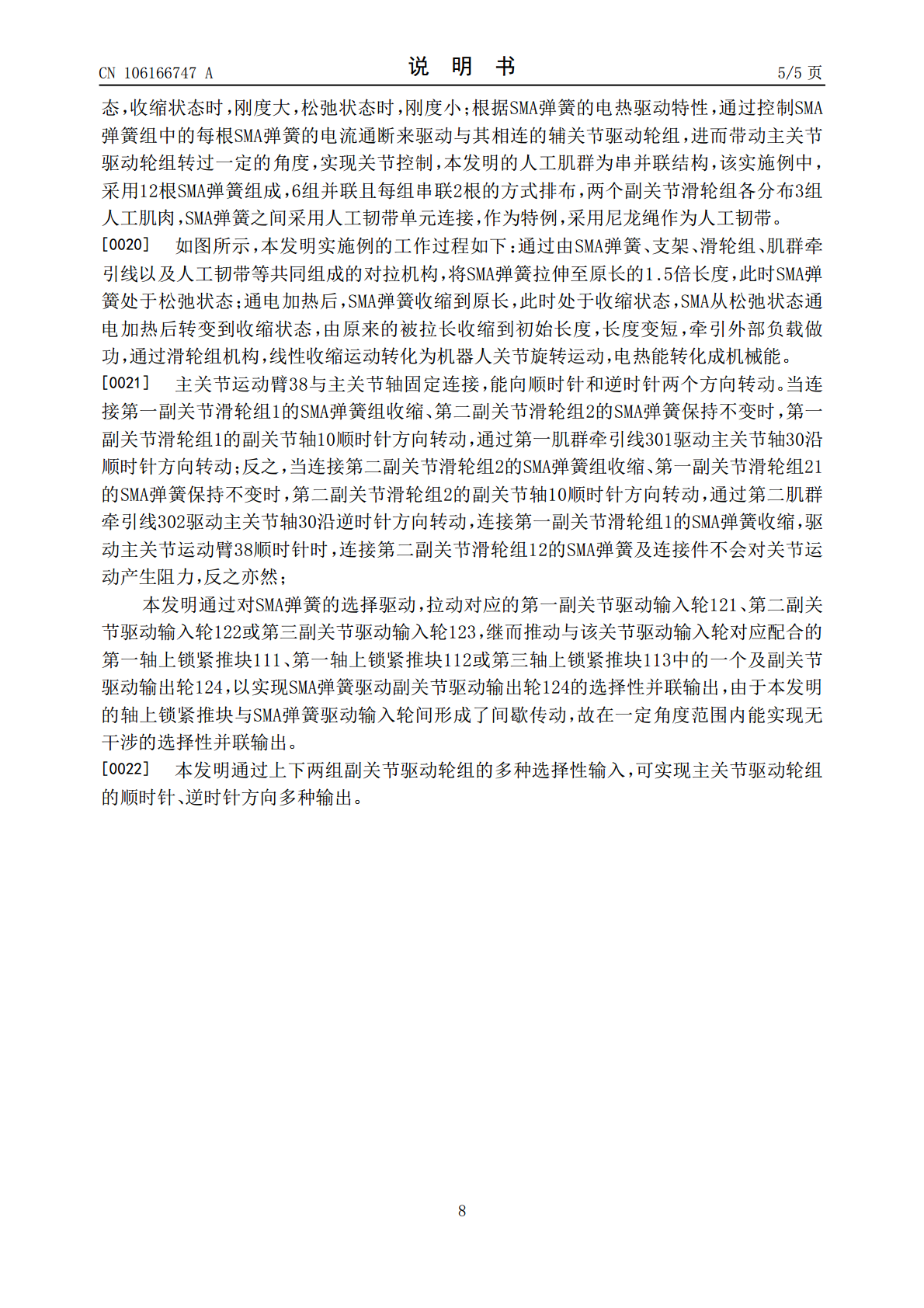
人工肌肉驱动且结构解耦的机器人关节,属于机器人部件技术领域。它包括底座及前立板组、中立板组及后立板,前立板组上设有主关节滑轮组、中立板组上设有第一副关节滑轮组和第二副关节滑轮组,第一肌群牵引线一端设置在主关节滑轮组上,另一端设置在第一副关节滑轮组上,第二肌群牵引线一端设置在主关节滑轮组上,另一端设置在第二副关节滑轮组上,主关节滑轮组的主关节轴端部连接主关节运动臂。本发明采用不同的人工肌肉致动器单元进行实验,根据SMA弹簧的电热驱动特性,通过控制SMA弹簧组中的每根SMA弹簧的电流通断来驱动与其相连的副关节
一种仿肌肉驱动的机器人关节.pdf
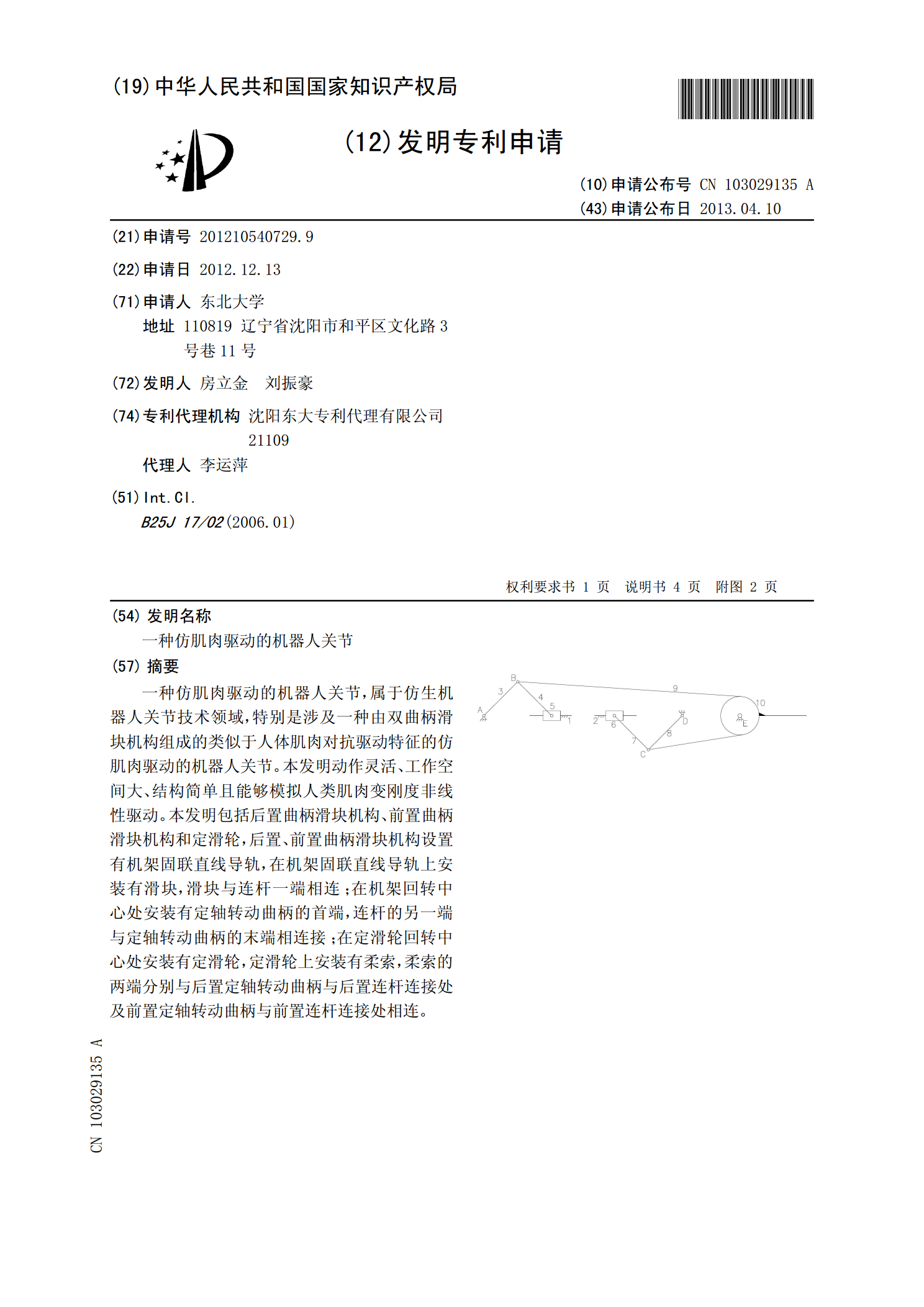
一种仿肌肉驱动的机器人关节,属于仿生机器人关节技术领域,特别是涉及一种由双曲柄滑块机构组成的类似于人体肌肉对抗驱动特征的仿肌肉驱动的机器人关节。本发明动作灵活、工作空间大、结构简单且能够模拟人类肌肉变刚度非线性驱动。本发明包括后置曲柄滑块机构、前置曲柄滑块机构和定滑轮,后置、前置曲柄滑块机构设置有机架固联直线导轨,在机架固联直线导轨上安装有滑块,滑块与连杆一端相连;在机架回转中心处安装有定轴转动曲柄的首端,连杆的另一端与定轴转动曲柄的末端相连接;在定滑轮回转中心处安装有定滑轮,定滑轮上安装有柔索,柔索的两
单气动人工肌肉混合驱动关节.pdf
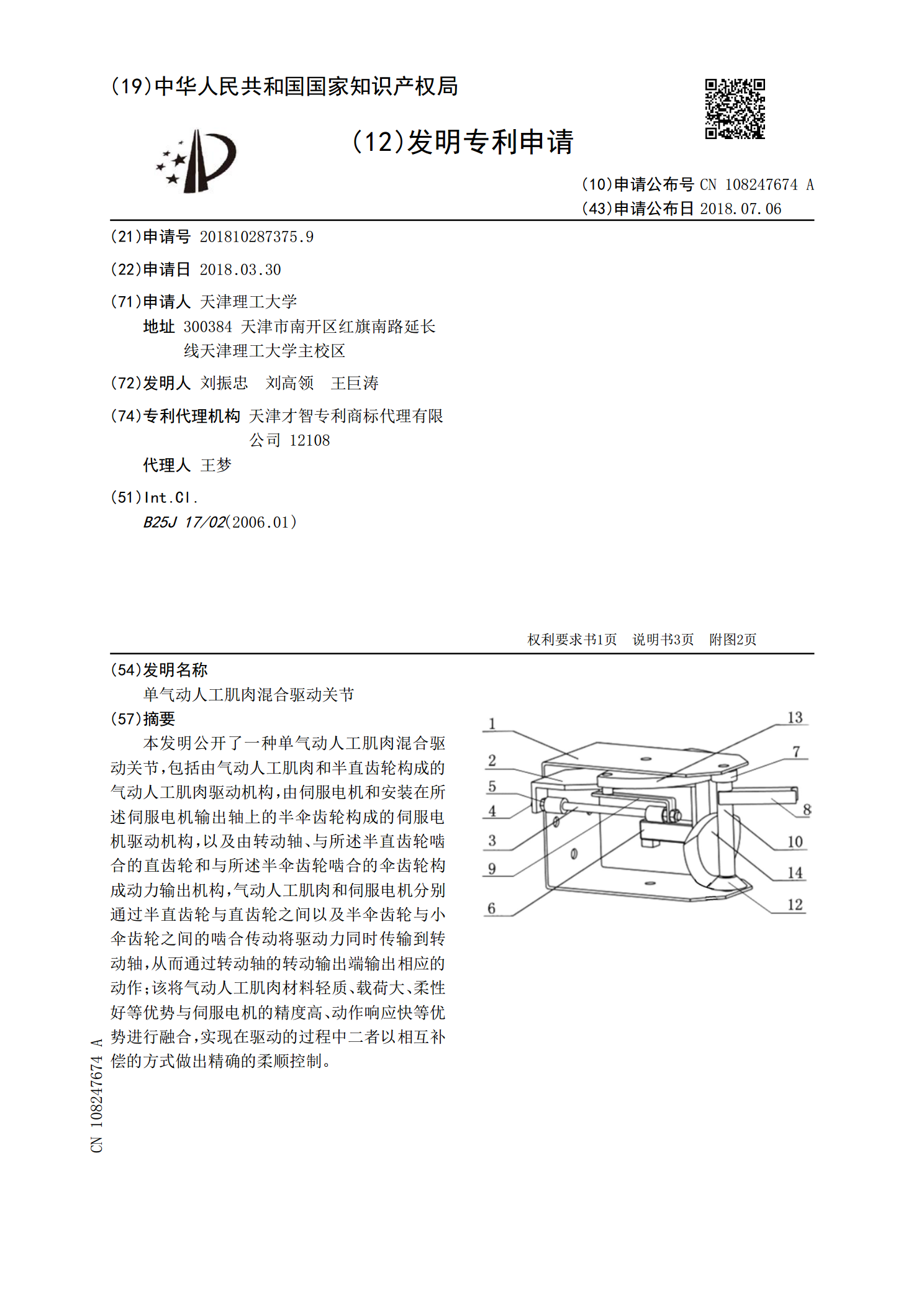
本发明公开了一种单气动人工肌肉混合驱动关节,包括由气动人工肌肉和半直齿轮构成的气动人工肌肉驱动机构,由伺服电机和安装在所述伺服电机输出轴上的半伞齿轮构成的伺服电机驱动机构,以及由转动轴、与所述半直齿轮啮合的直齿轮和与所述半伞齿轮啮合的伞齿轮构成动力输出机构,气动人工肌肉和伺服电机分别通过半直齿轮与直齿轮之间以及半伞齿轮与小伞齿轮之间的啮合传动将驱动力同时传输到转动轴,从而通过转动轴的转动输出端输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势进行融合,实现在
机器人关节驱动结构及机器人.pdf
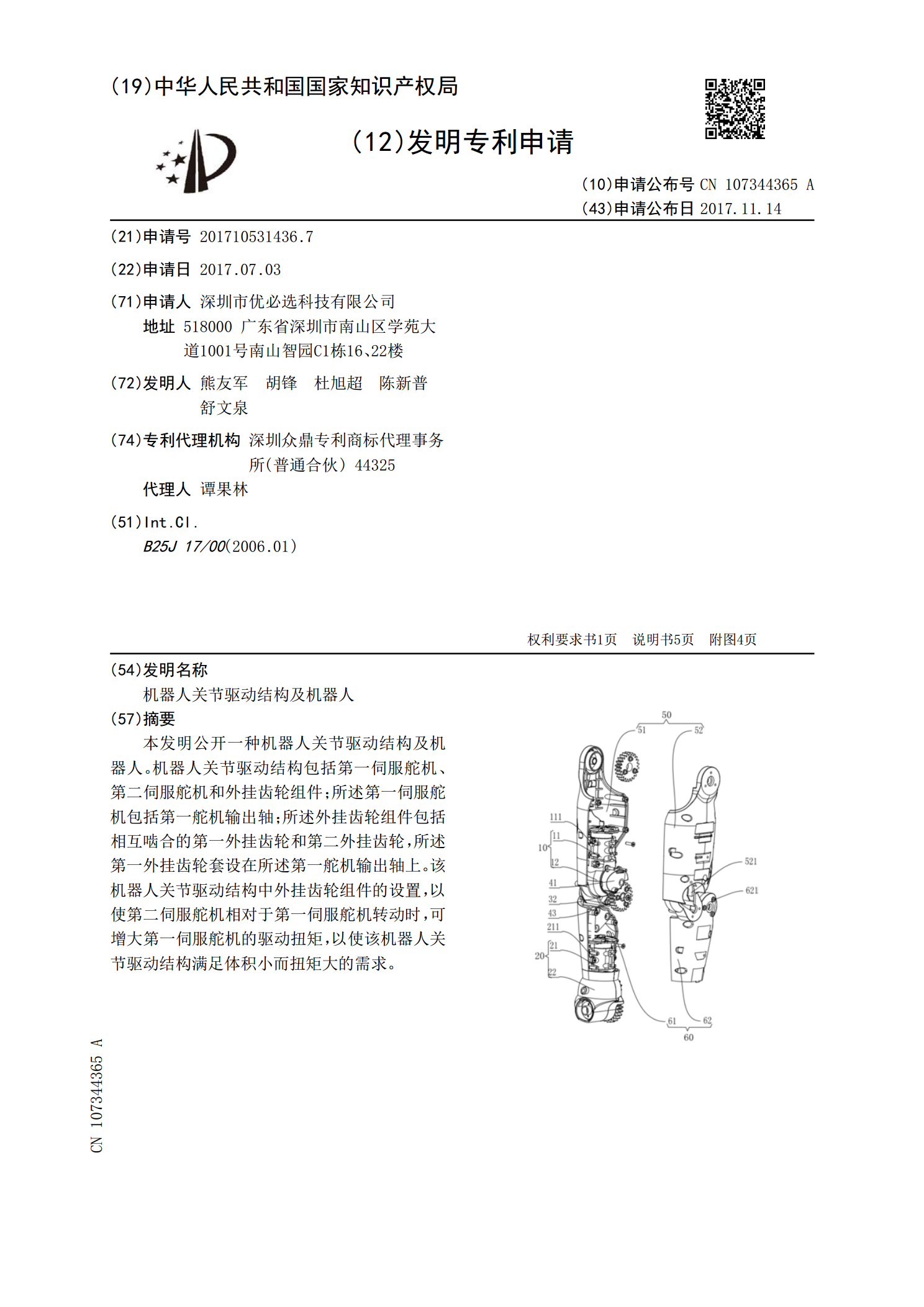
本发明公开一种机器人关节驱动结构及机器人。机器人关节驱动结构包括第一伺服舵机、第二伺服舵机和外挂齿轮组件;所述第一伺服舵机包括第一舵机输出轴;所述外挂齿轮组件包括相互啮合的第一外挂齿轮和第二外挂齿轮,所述第一外挂齿轮套设在所述第一舵机输出轴上。该机器人关节驱动结构中外挂齿轮组件的设置,以使第二伺服舵机相对于第一伺服舵机转动时,可增大第一伺服舵机的驱动扭矩,以使该机器人关节驱动结构满足体积小而扭矩大的需求。
气动人工肌肉与伺服电机混合驱动关节.pdf
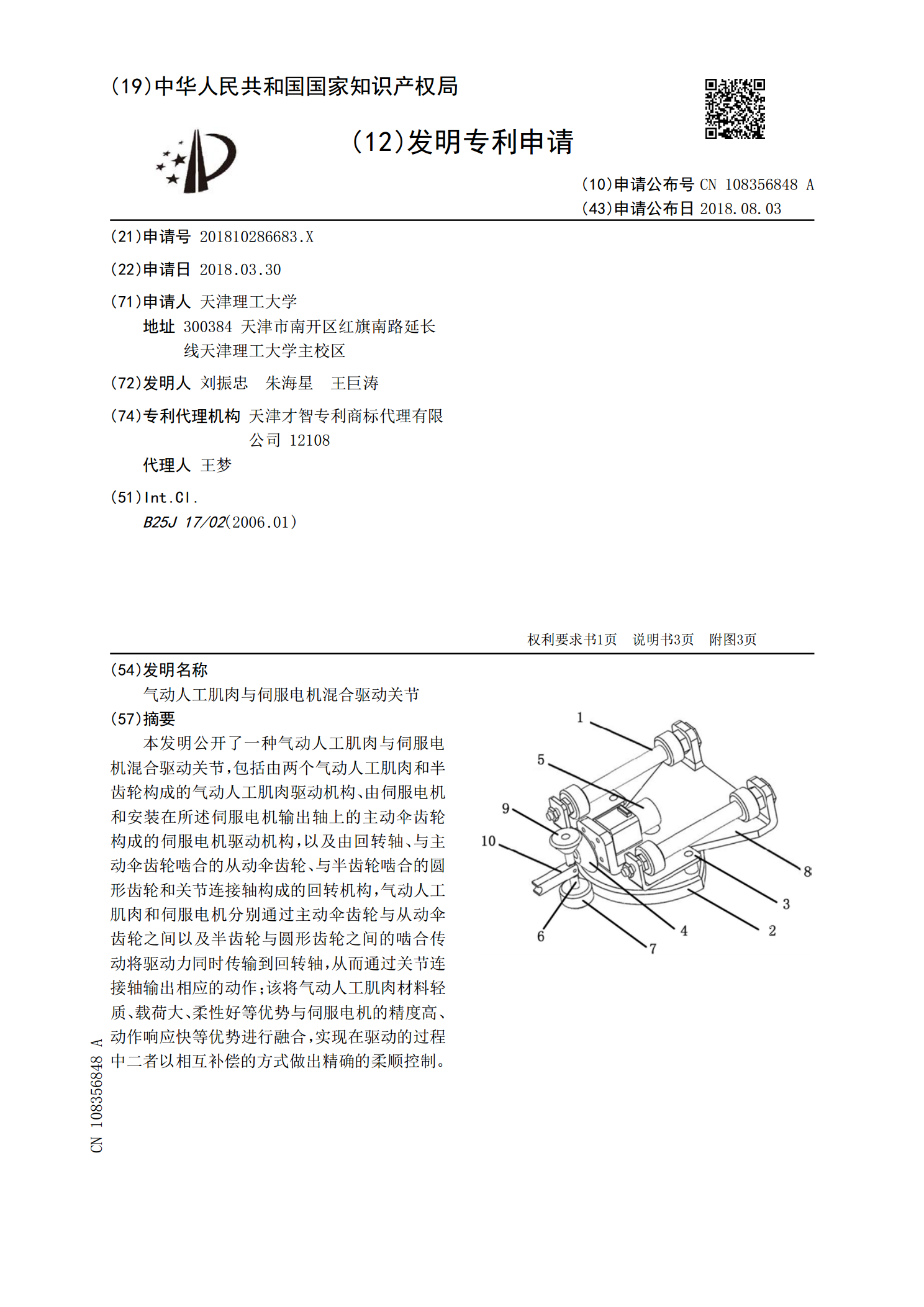
本发明公开了一种气动人工肌肉与伺服电机混合驱动关节,包括由两个气动人工肌肉和半齿轮构成的气动人工肌肉驱动机构、由伺服电机和安装在所述伺服电机输出轴上的主动伞齿轮构成的伺服电机驱动机构,以及由回转轴、与主动伞齿轮啮合的从动伞齿轮、与半齿轮啮合的圆形齿轮和关节连接轴构成的回转机构,气动人工肌肉和伺服电机分别通过主动伞齿轮与从动伞齿轮之间以及半齿轮与圆形齿轮之间的啮合传动将驱动力同时传输到回转轴,从而通过关节连接轴输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势