
一种能够自主导航轮式机器人移动车.pdf

是你****馨呀

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种能够自主导航轮式机器人移动车.pdf
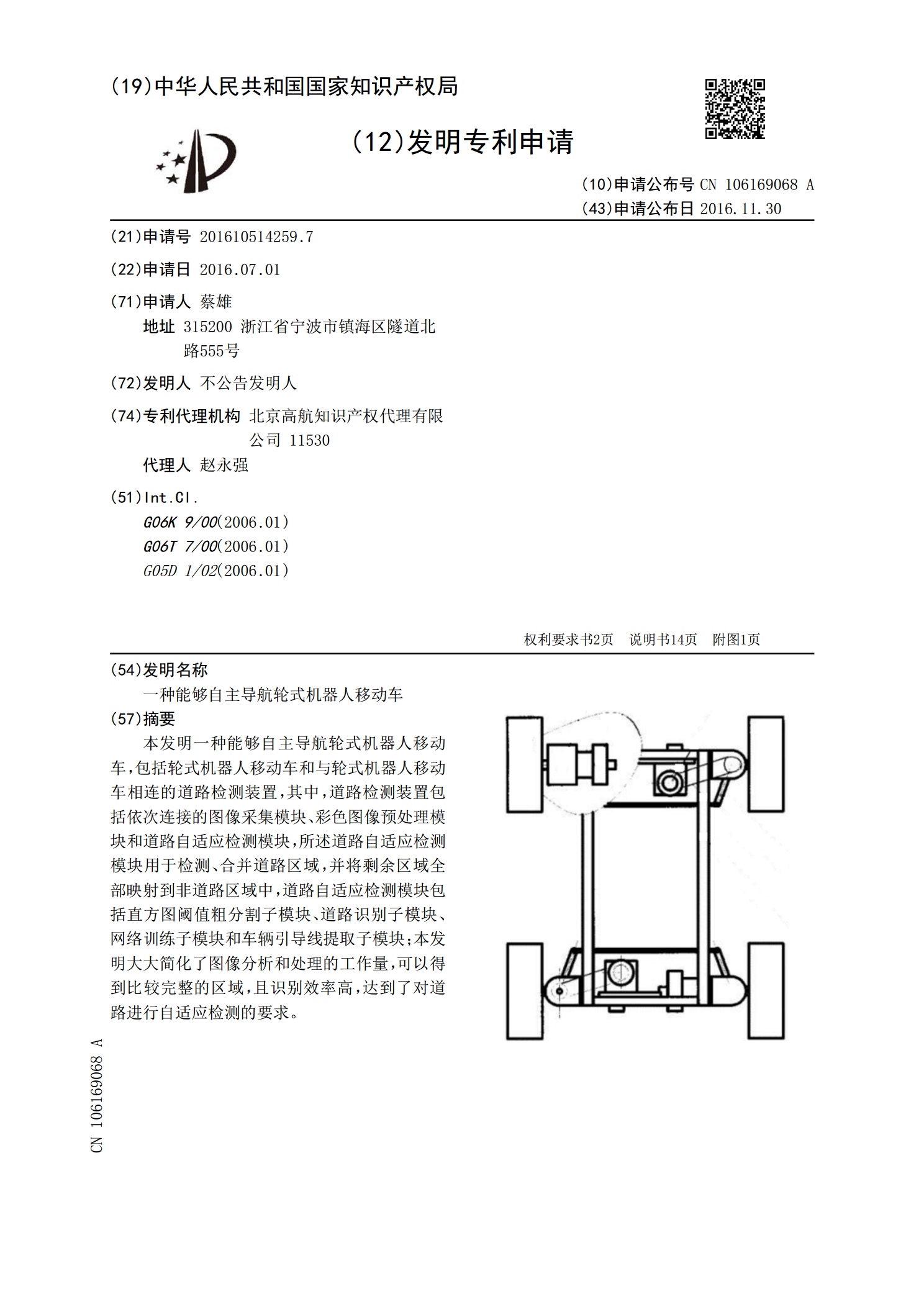
本发明一种能够自主导航轮式机器人移动车,包括轮式机器人移动车和与轮式机器人移动车相连的道路检测装置,其中,道路检测装置包括依次连接的图像采集模块、彩色图像预处理模块和道路自适应检测模块,所述道路自适应检测模块用于检测、合并道路区域,并将剩余区域全部映射到非道路区域中,道路自适应检测模块包括直方图阈值粗分割子模块、道路识别子模块、网络训练子模块和车辆引导线提取子模块;本发明大大简化了图像分析和处理的工作量,可以得到比较完整的区域,且识别效率高,达到了对道路进行自适应检测的要求。

磁导航自主轮式移动机器人的里程检测方法.pdf
本发明公开了一种磁导航自主轮式移动机器人的里程检测方法,包括以下步骤:步骤1:确定磁条或磁道钉的铺设间距L;步骤2:记录机器人在前进过程中,前后两排磁传感器组不能检测磁场的次数N1,N2;步骤3:通过以下里程计算公式计算出机器人当前的里程s:或式中,A表示磁条的长度,R表示磁道钉的半径,本发明通过科学设定磁道钉或磁条的铺设间隔,得到磁道钉或磁条磁场间的空隙,然后通过记录前后两排磁传感器组不能读到磁场的次数,并结合磁条或磁道钉的铺设间隔长度实现对机器人里程的检测,该方法计算简单、相对准确、不受外部环境影响,

基于IHDR自主学习框架的轮式移动机器人导航方法.pdf
本发明涉及一种基于IHDR自主学习框架的轮式移动机器人导航方法。包括以下步骤:首先指导机器人移动,在此过程中机器人通过kinect传感器和手柄控制量实时采集当前时刻的图像信息和速度值;然后利用IHDR算法建立一种图像输入、速度值输出的映射关系,并将采集到的大量数据以“知识”树状结构的形式存放在机器人中;最后在无人干预的条件下,机器人可以根据当前的图像信息,去检索知识库,从而实现自主导航。该方法可以使得机器人具备跟人一样的思维方式,体现了一种认知能力,而非传统的通过数学模型的方式去导航,智能化程度更高。
一种轮式自主移动机器人.pdf
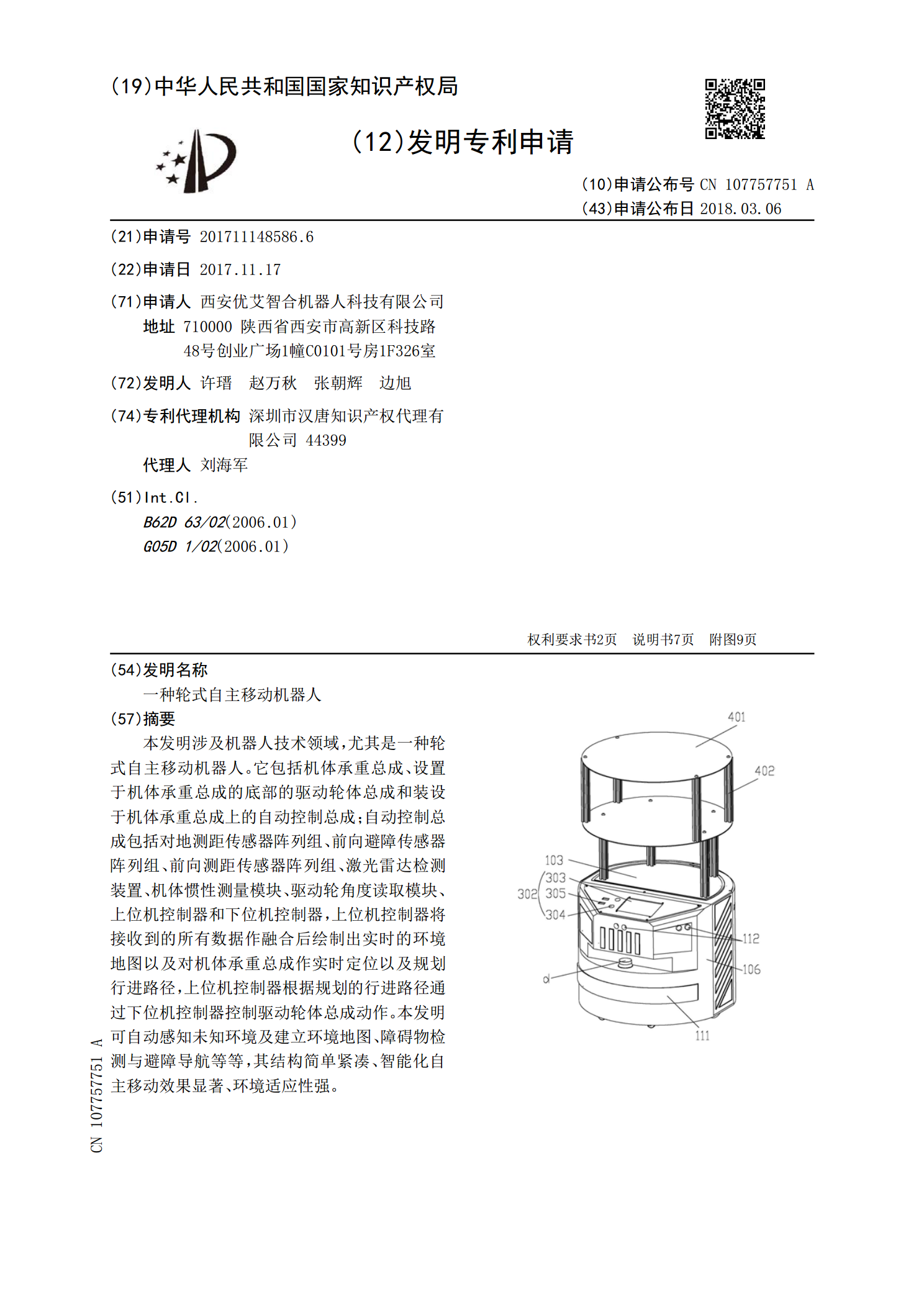
本发明涉及机器人技术领域,尤其是一种轮式自主移动机器人。它包括机体承重总成、设置于机体承重总成的底部的驱动轮体总成和装设于机体承重总成上的自动控制总成;自动控制总成包括对地测距传感器阵列组、前向避障传感器阵列组、前向测距传感器阵列组、激光雷达检测装置、机体惯性测量模块、驱动轮角度读取模块、上位机控制器和下位机控制器,上位机控制器将接收到的所有数据作融合后绘制出实时的环境地图以及对机体承重总成作实时定位以及规划行进路径,上位机控制器根据规划的行进路径通过下位机控制器控制驱动轮体总成动作。本发明可自动感知未知

轮式智能自主移动服务机器人.pdf
本发明一种轮式智能自主移动服务机器人,分为上部和设置于底盘上的下部,包括:控制系统、运动机构、嵌入式单板计算机、云台摄像机和传感器;运动机构,通过电机驱动和/或控制器进行控制;工控机,通过串口连接电机驱动和/或控制器;云台摄像机,通过串口控制云台摄像机的方位和角度,提供机器人周围的环境信息,并将其采集的信息通过图像采集卡连接到嵌入式计算机;传感器设置在机器人的上部与下部,通过信息处理后连接到嵌入式计算机;机器人上部和下部通过上连接板和下连接板进行折叠连接,在上下连接板之间设有横向折叠轴和/或抽插