
一种微电机驱动四杆直线仿生跳跃机构.pdf

纪阳****公主


1/9

2/9

3/9

4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种微电机驱动四杆直线仿生跳跃机构.pdf
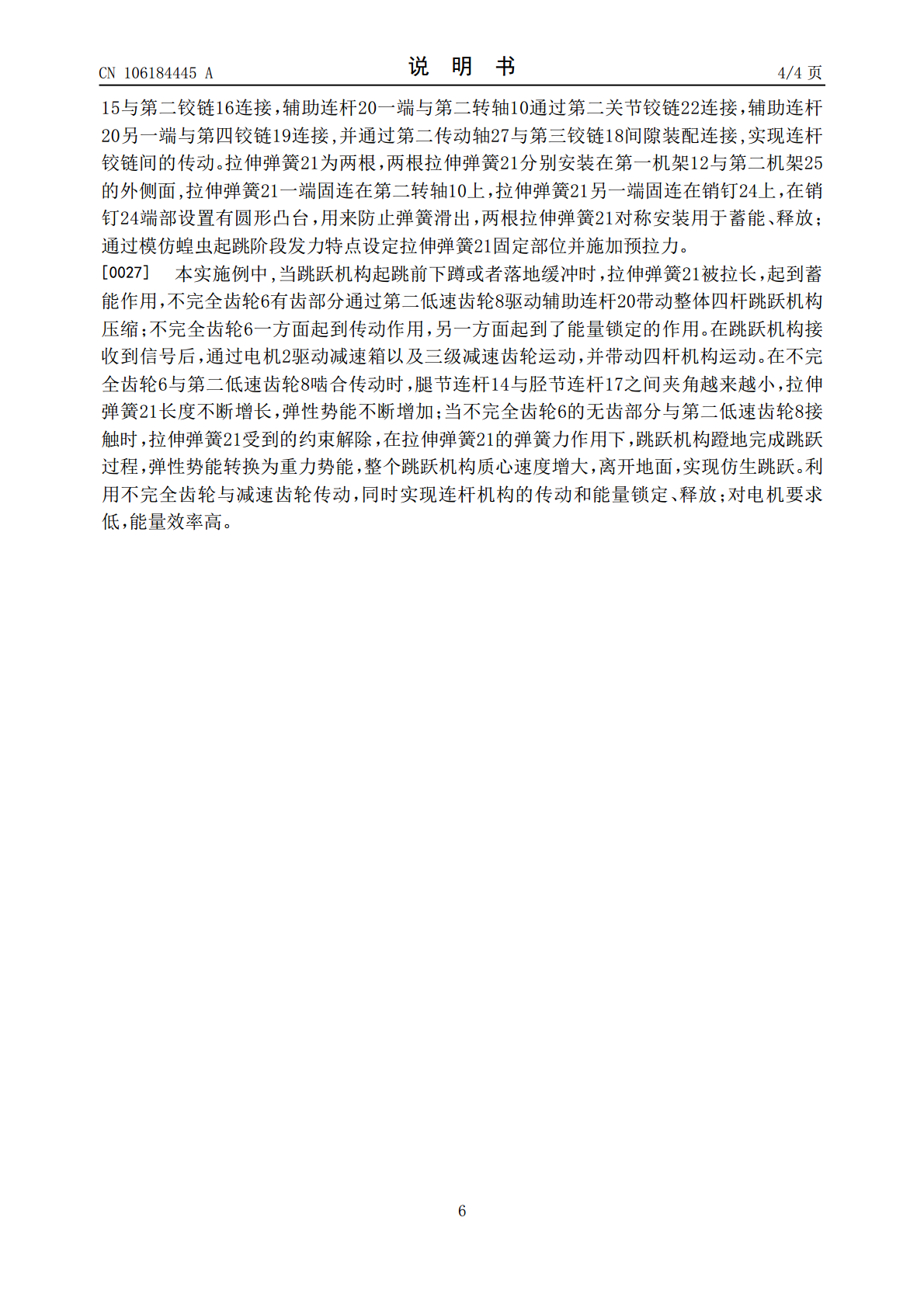
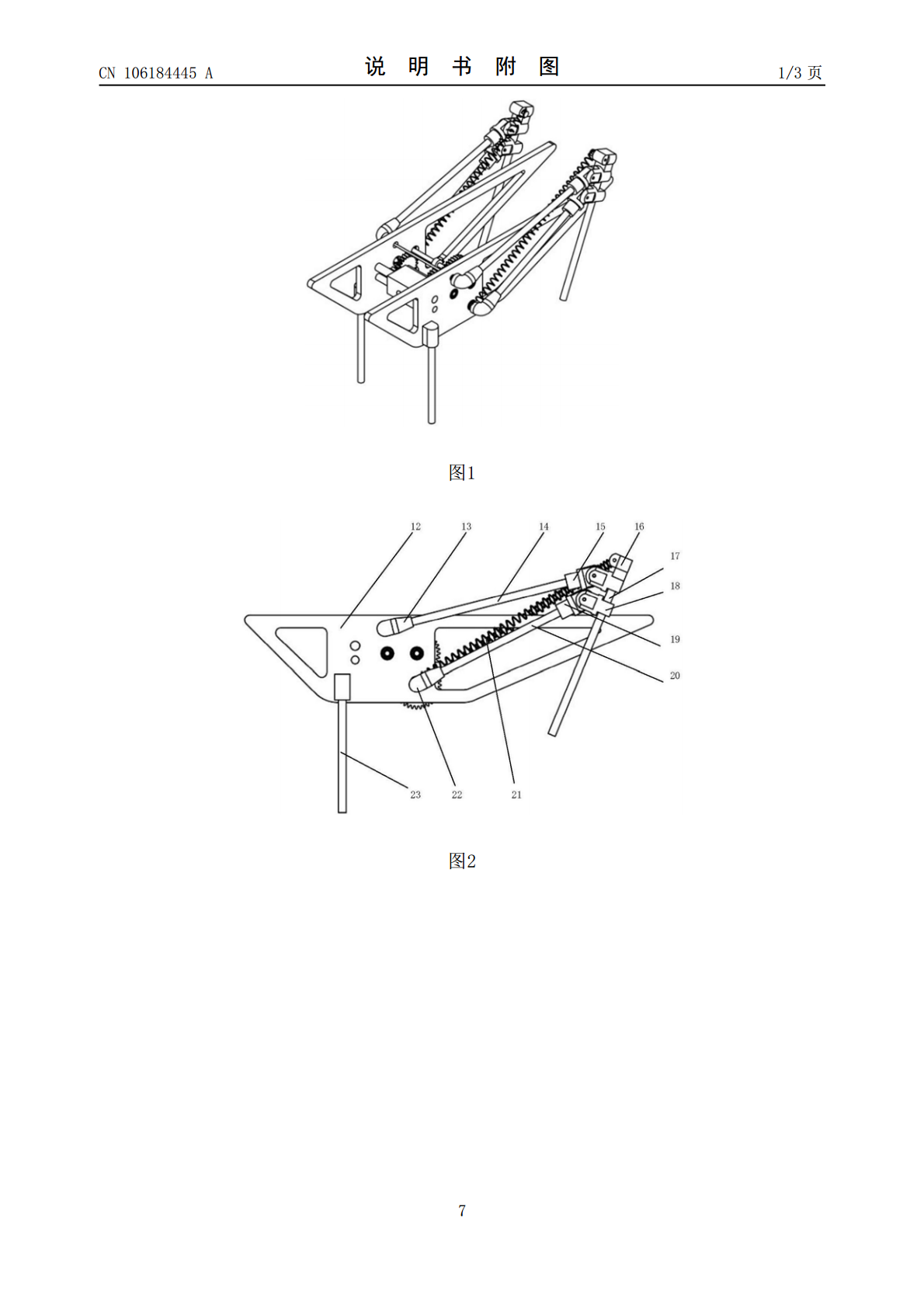
本发明公开了一种微电机驱动四杆直线仿生跳跃机构,通过模仿蝗虫后腿起跳过程中的膝关节转角变化规律,以及胫节末端的轨迹,实现起跳阶段的受力状态与蝗虫相似。通过微电机和减速箱驱动齿轮运动,并带动直线四杆直线运动,在不完全齿轮与低速齿轮啮合传动时,腿节连杆与胫节连杆之间夹角逐渐减小,拉伸弹簧长度不断增长,弹簧势能不断增加;当不完全齿轮的无齿部分与低速端传动时,拉伸弹簧受到的约束突然解除,在弹簧力作用下,跳跃机构蹬地完成跳跃过程,弹性势能转换为重力势能,实现仿生跳跃。利用不完全齿轮与减速齿轮传动,同时实现连杆机构的

一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指.pdf
本发明公开了一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指。本发明手指本体部分包括手指机架、第一指节、拉伸弹簧、第二指节、指节联接件、第三指节;手指机械传动链包括微型电机微型减速器组件、微型蜗杆蜗轮副、驱动绳索组件、连杆;第一指节、第二指节、连杆及手指机架组成四连杆机构,第一指节的屈指及展指运动使第二指节从动地实现屈指及展指运动,形成欠驱动运动方式。本发明手指为模块式结构设计,便于整个手指的装配及拆除,手指结构简单,重量轻,手指的设计导致掌部厚度尺寸减小。

一种连续跳跃的仿生机构.pdf
本发明一种连续跳跃的仿生机构包括机体、弹跳机构、驱动机构以及电源;所述机体为仿生躯干主体,用于所述弹跳机构、驱动机构以及电源的安装固定;所述弹跳机构分两组,通过连接杆将其对称安装在所述机体的左右两侧;所述驱动机构安装在机体内,包括减速电机、不完全齿轮机构和齿轮轴,电源与所述减速电机连接用于整个机构的动力来源。利用减速电机驱动不完全齿轮机构,进一步带动弹跳机构的连接臂和摇臂组合转动,通过连接架带动其前腿和后腿转动,进而压缩扭簧,齿轮啮合到缺齿处,扭簧能量释放实现机构起跳,起跳后,大臂继续向前转动到初始位置,
一种人力车双功能踏杆驱动的四杆驱动机构.pdf
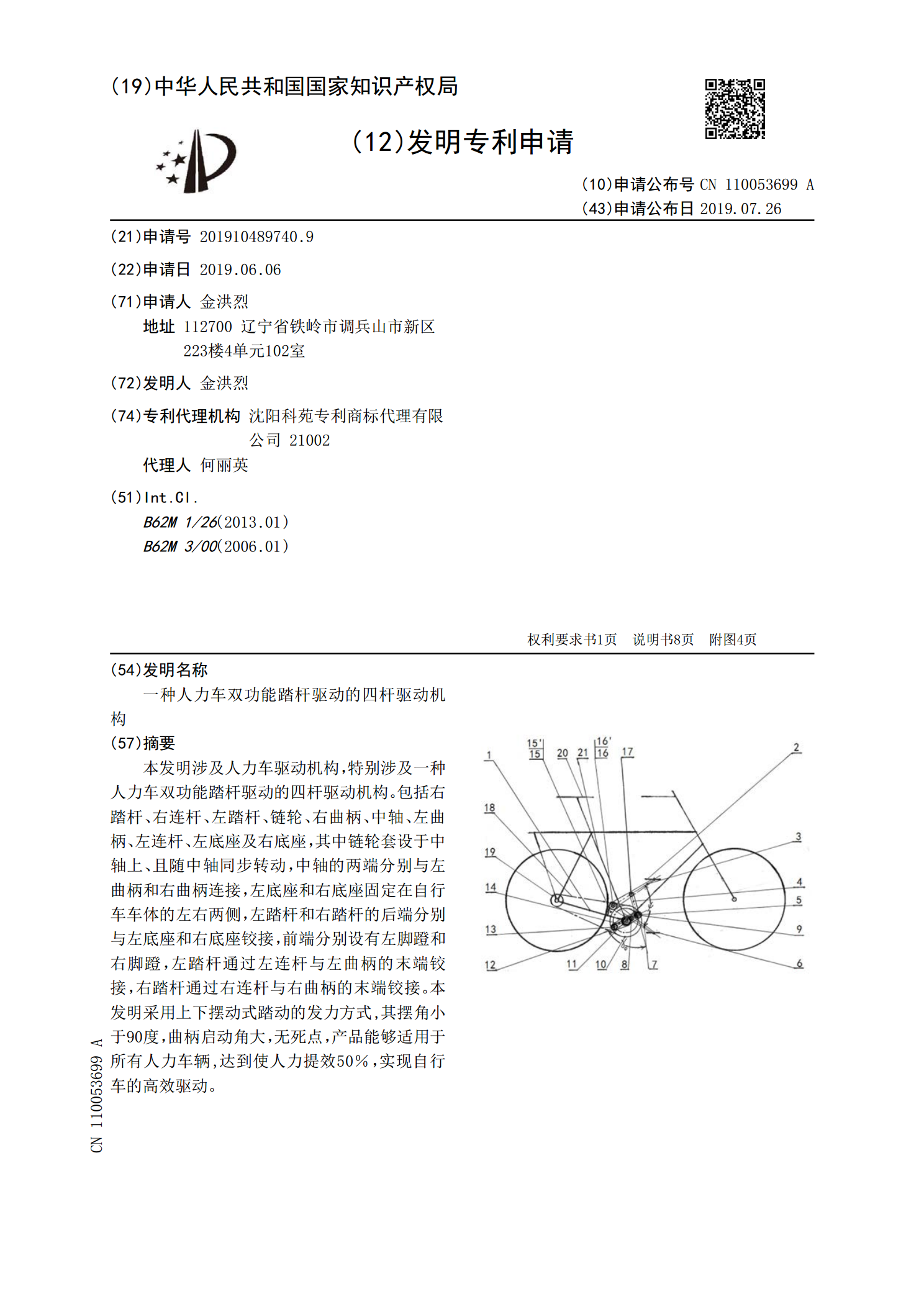
本发明涉及人力车驱动机构,特别涉及一种人力车双功能踏杆驱动的四杆驱动机构。包括右踏杆、右连杆、左踏杆、链轮、右曲柄、中轴、左曲柄、左连杆、左底座及右底座,其中链轮套设于中轴上、且随中轴同步转动,中轴的两端分别与左曲柄和右曲柄连接,左底座和右底座固定在自行车车体的左右两侧,左踏杆和右踏杆的后端分别与左底座和右底座铰接,前端分别设有左脚蹬和右脚蹬,左踏杆通过左连杆与左曲柄的末端铰接,右踏杆通过右连杆与右曲柄的末端铰接。本发明采用上下摆动式踏动的发力方式,其摆角小于90度,曲柄启动角大,无死点,产品能够适用于所
一种带有球副的顶杆凹槽仿生蜻蜓翅膀驱动机构.pdf
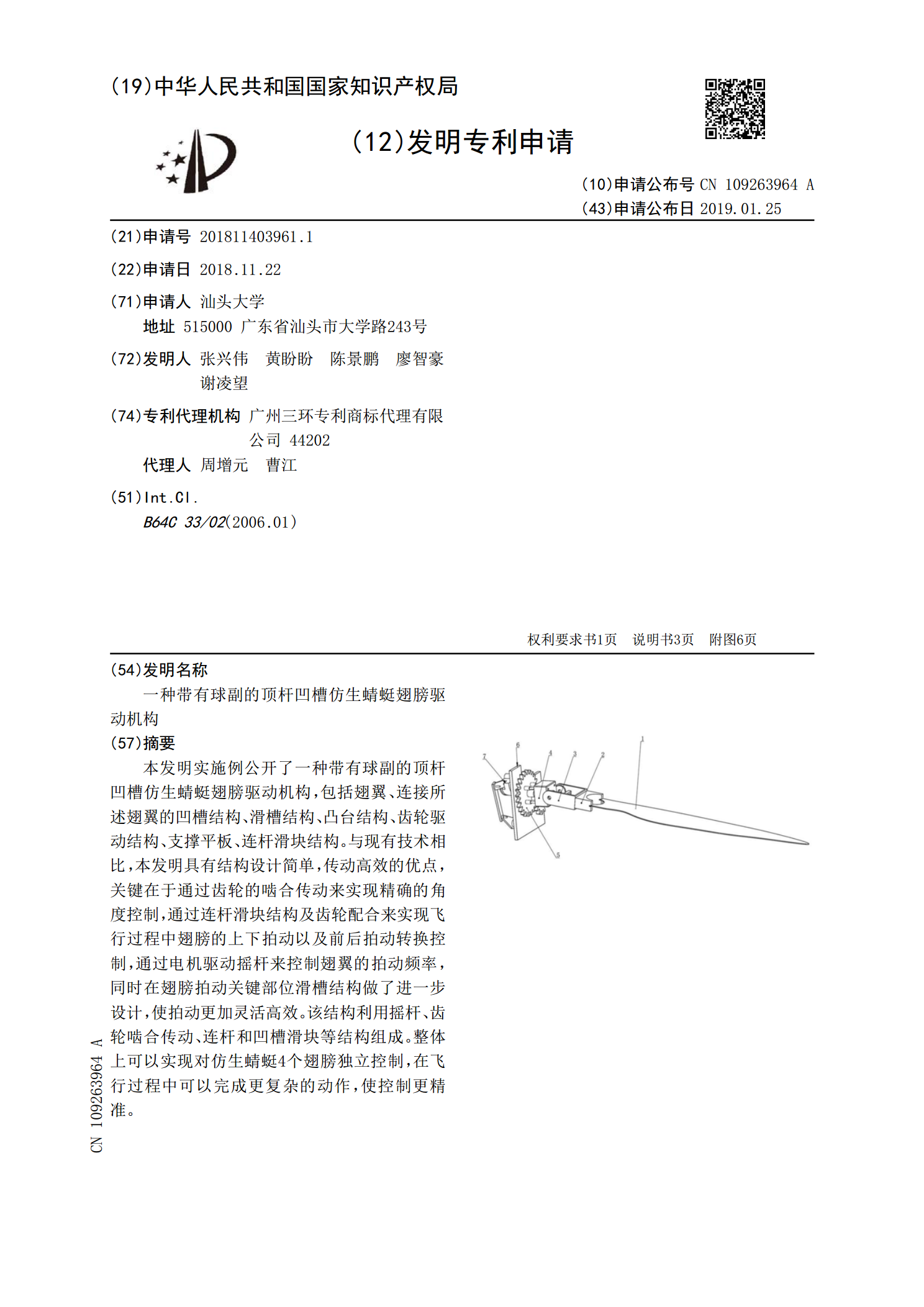
本发明实施例公开了一种带有球副的顶杆凹槽仿生蜻蜓翅膀驱动机构,包括翅翼、连接所述翅翼的凹槽结构、滑槽结构、凸台结构、齿轮驱动结构、支撑平板、连杆滑块结构。与现有技术相比,本发明具有结构设计简单,传动高效的优点,关键在于通过齿轮的啮合传动来实现精确的角度控制,通过连杆滑块结构及齿轮配合来实现飞行过程中翅膀的上下拍动以及前后拍动转换控制,通过电机驱动摇杆来控制翅翼的拍动频率,同时在翅膀拍动关键部位滑槽结构做了进一步设计,使拍动更加灵活高效。该结构利用摇杆、齿轮啮合传动、连杆和凹槽滑块等结构组成。整体上可以实现