
一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指.pdf

是向****23


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指.pdf
本发明公开了一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指。本发明手指本体部分包括手指机架、第一指节、拉伸弹簧、第二指节、指节联接件、第三指节;手指机械传动链包括微型电机微型减速器组件、微型蜗杆蜗轮副、驱动绳索组件、连杆;第一指节、第二指节、连杆及手指机架组成四连杆机构,第一指节的屈指及展指运动使第二指节从动地实现屈指及展指运动,形成欠驱动运动方式。本发明手指为模块式结构设计,便于整个手指的装配及拆除,手指结构简单,重量轻,手指的设计导致掌部厚度尺寸减小。

轮系式欠驱动仿生假肢手指.pdf
本发明公开了一种轮系式欠驱动仿生假肢手指。本发明手指本体部分包括手指基架、第一指节机架、第一指节外壳、第二指节机架、第二指节外壳、第三指节;手指机械传动链包括微型电机微型减速器组件、锥齿轮副及直齿轮副;传动链传动至第四直齿轮后,运动分解为两个支链,其中一条支链实现第二关节的运动,另一条支链实现第一关节的运动,两个关节的运动是耦合的,形成欠驱动运动方式。本发明手指为模块式结构设计,便于整个手指的装配及拆除,手指结构简单,重量轻,手指的设计导致掌部厚度尺寸减小。

一种欠驱动假肢手.pdf
本发明提供了一种欠驱动假肢手,包括手掌、拇指和四根手指,手指由手指本体和手指内传动机构构成,拇指由拇指本体和拇指内传动机构构成,手掌内设有指间驱动机构和拇指驱动机构;手指本体以滑轮为主要部件,手指内传动机构采用张紧绳和放松绳依次交替缠绕于手指的各滑轮上,指间驱动机构采用单个电机驱动两个手指以及其多个自由度;拇指本体内以滑轮为主要部件,手指本体内传动机构采用传动绳作为传动介质,指间驱动机构采用槽轮组件、齿轮组件和曲柄滑块组件配合传动,实现单个电机控制拇指的多个自由度。本发明手指和拇指及其驱动机构配合形成一个
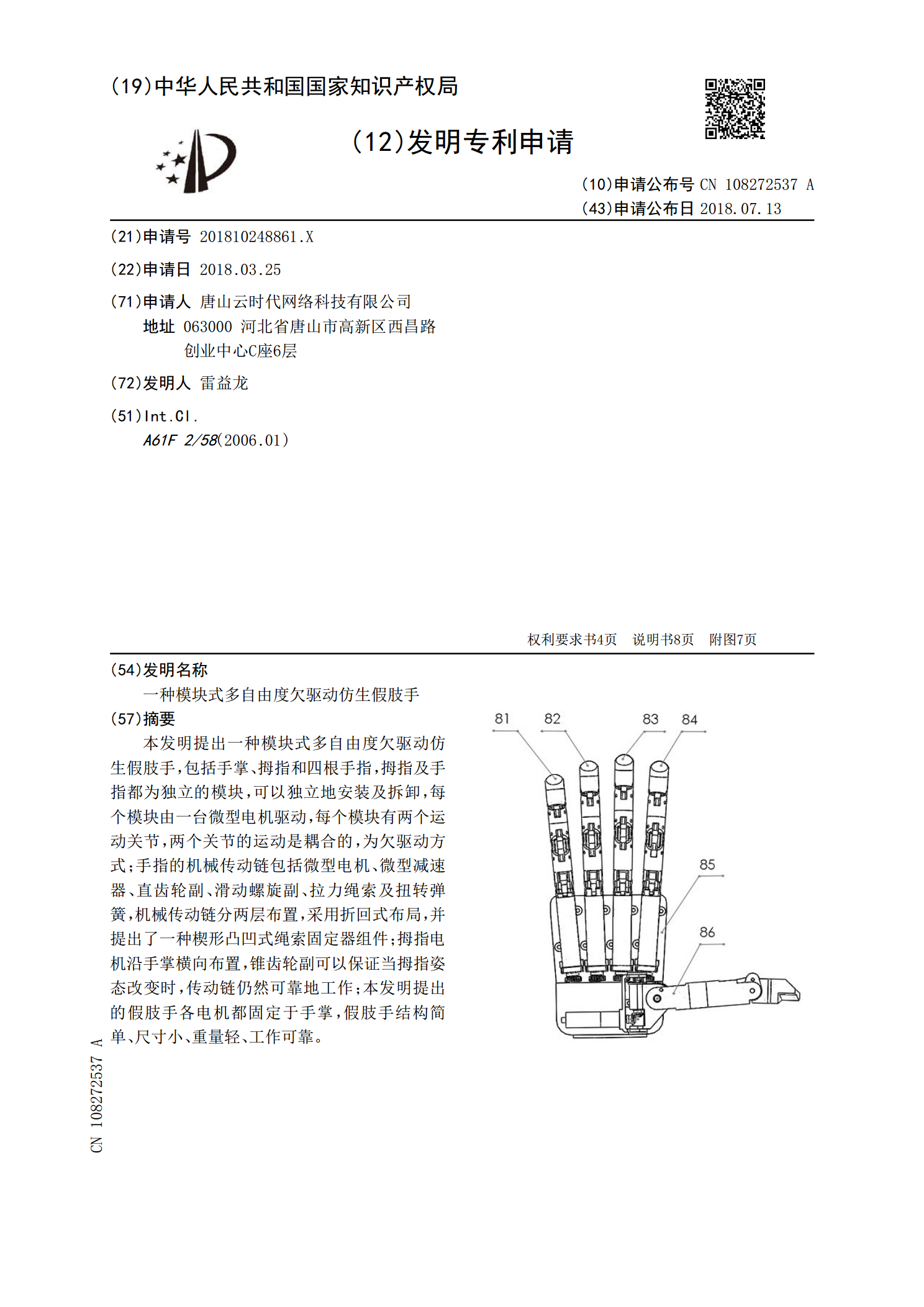
一种模块式多自由度欠驱动仿生假肢手.pdf
本发明提出一种模块式多自由度欠驱动仿生假肢手,包括手掌、拇指和四根手指,拇指及手指都为独立的模块,可以独立地安装及拆卸,每个模块由一台微型电机驱动,每个模块有两个运动关节,两个关节的运动是耦合的,为欠驱动方式;手指的机械传动链包括微型电机、微型减速器、直齿轮副、滑动螺旋副、拉力绳索及扭转弹簧,机械传动链分两层布置,采用折回式布局,并提出了一种楔形凸凹式绳索固定器组件;拇指电机沿手掌横向布置,锥齿轮副可以保证当拇指姿态改变时,传动链仍然可靠地工作;本发明提出的假肢手各电机都固定于手掌,假肢手结构简单、尺寸小
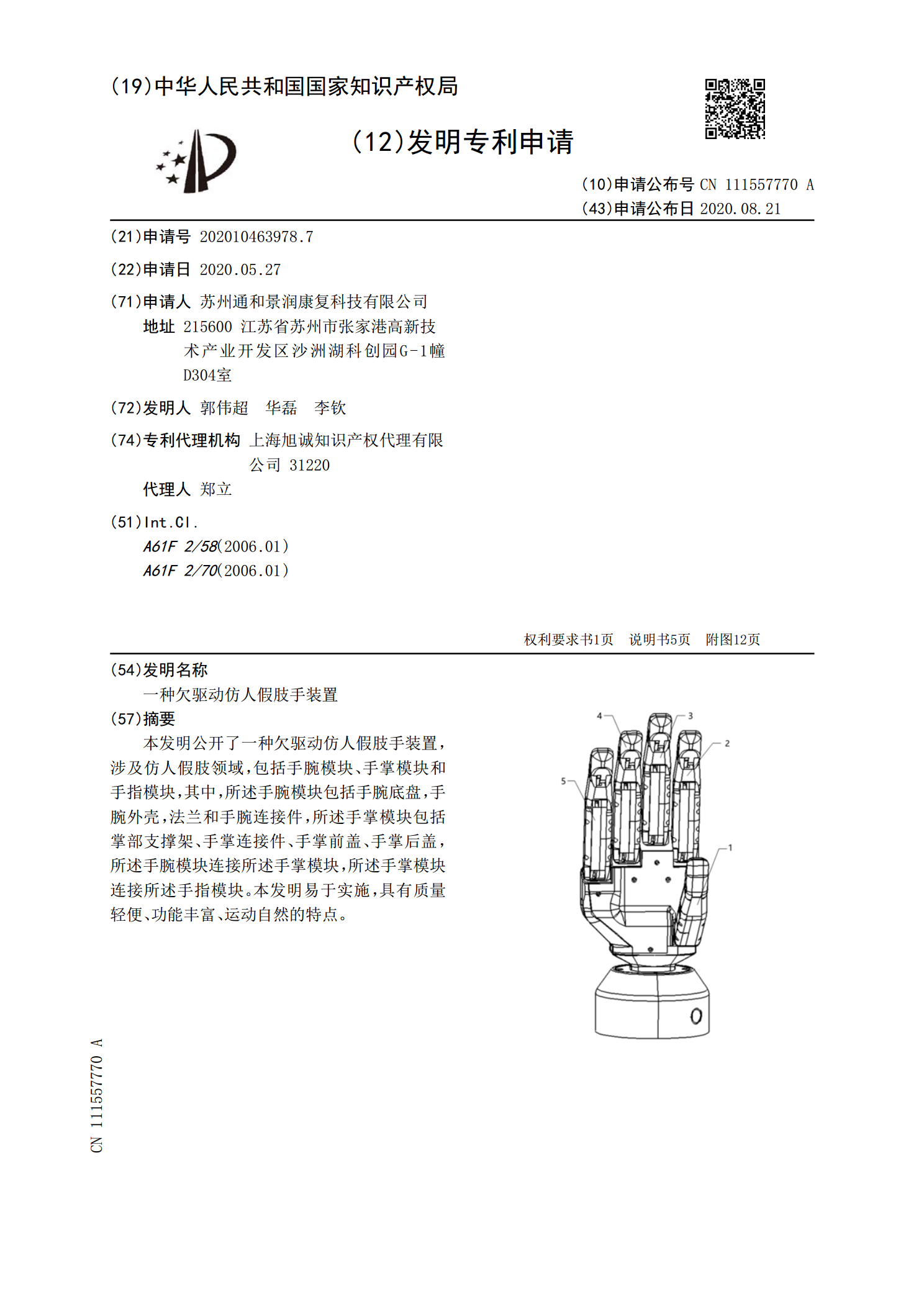
一种欠驱动仿人假肢手装置.pdf
本发明公开了一种欠驱动仿人假肢手装置,涉及仿人假肢领域,包括手腕模块、手掌模块和手指模块,其中,所述手腕模块包括手腕底盘,手腕外壳,法兰和手腕连接件,所述手掌模块包括掌部支撑架、手掌连接件、手掌前盖、手掌后盖,所述手腕模块连接所述手掌模块,所述手掌模块连接所述手指模块。本发明易于实施,具有质量轻便、功能丰富、运动自然的特点。