
自适应地形的轮式移动平台及具有其的消防探测机器人.pdf

努力****凌芹

1/9
2/9
3/9
4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自适应地形的轮式移动平台及具有其的消防探测机器人.pdf
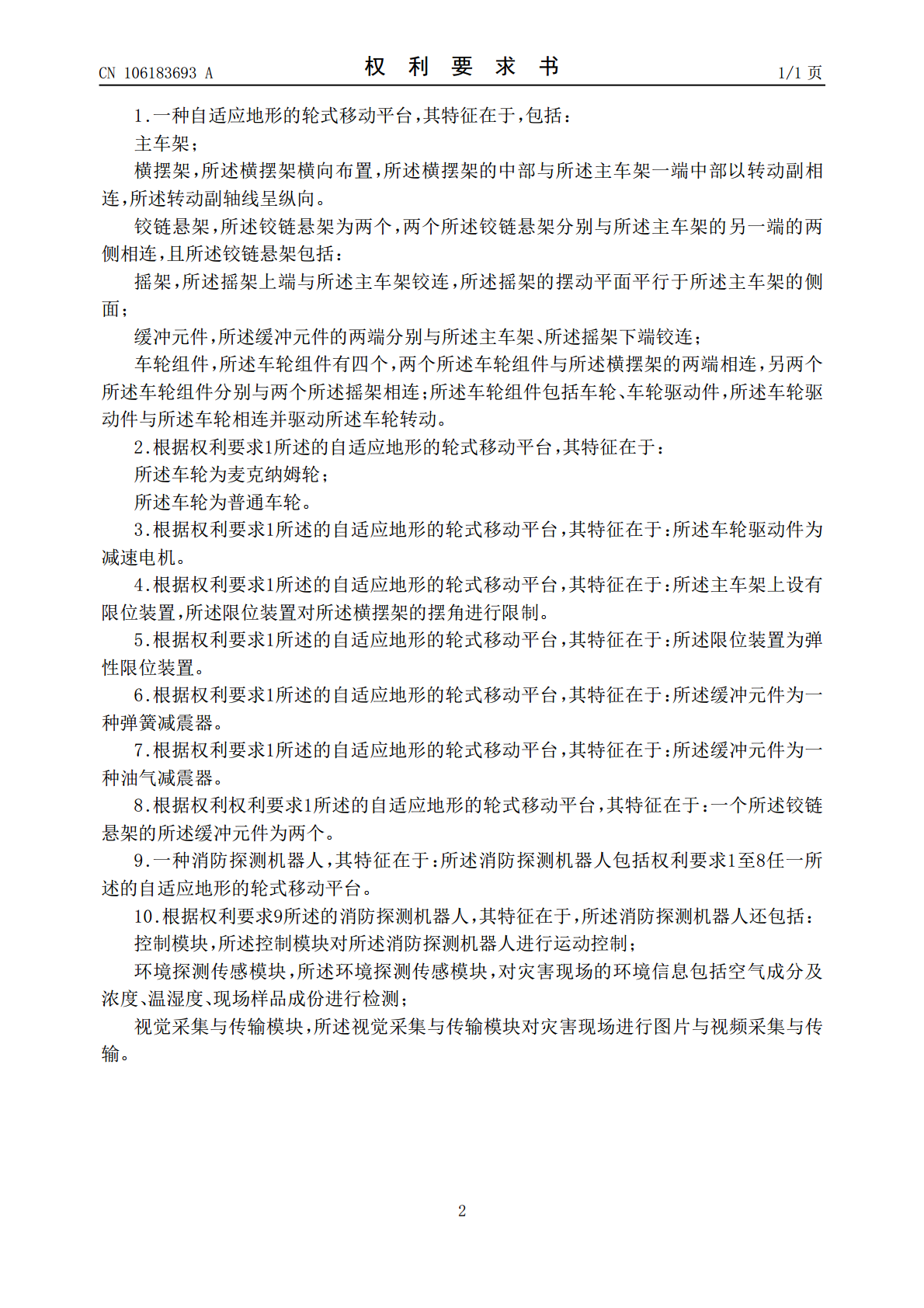
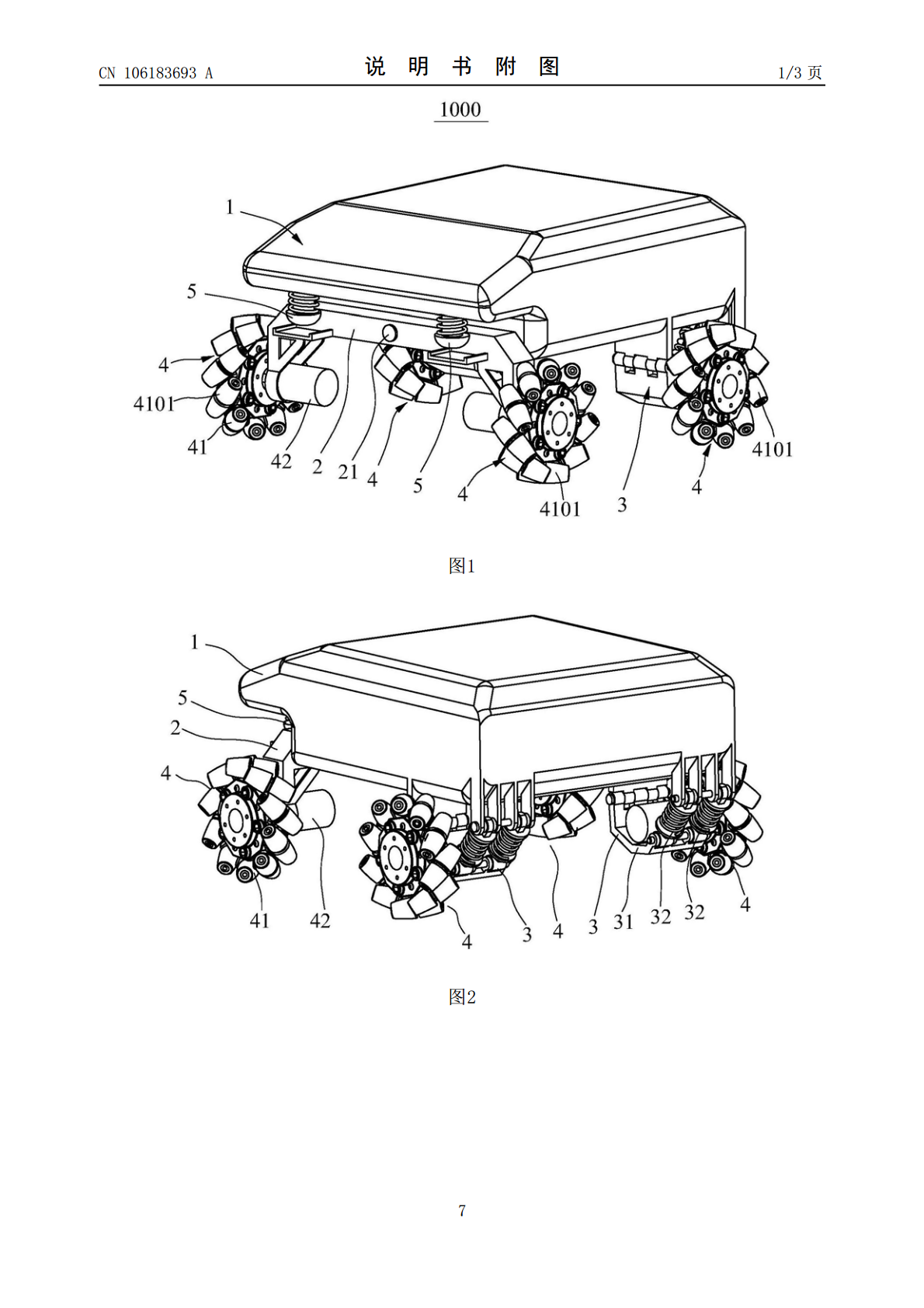
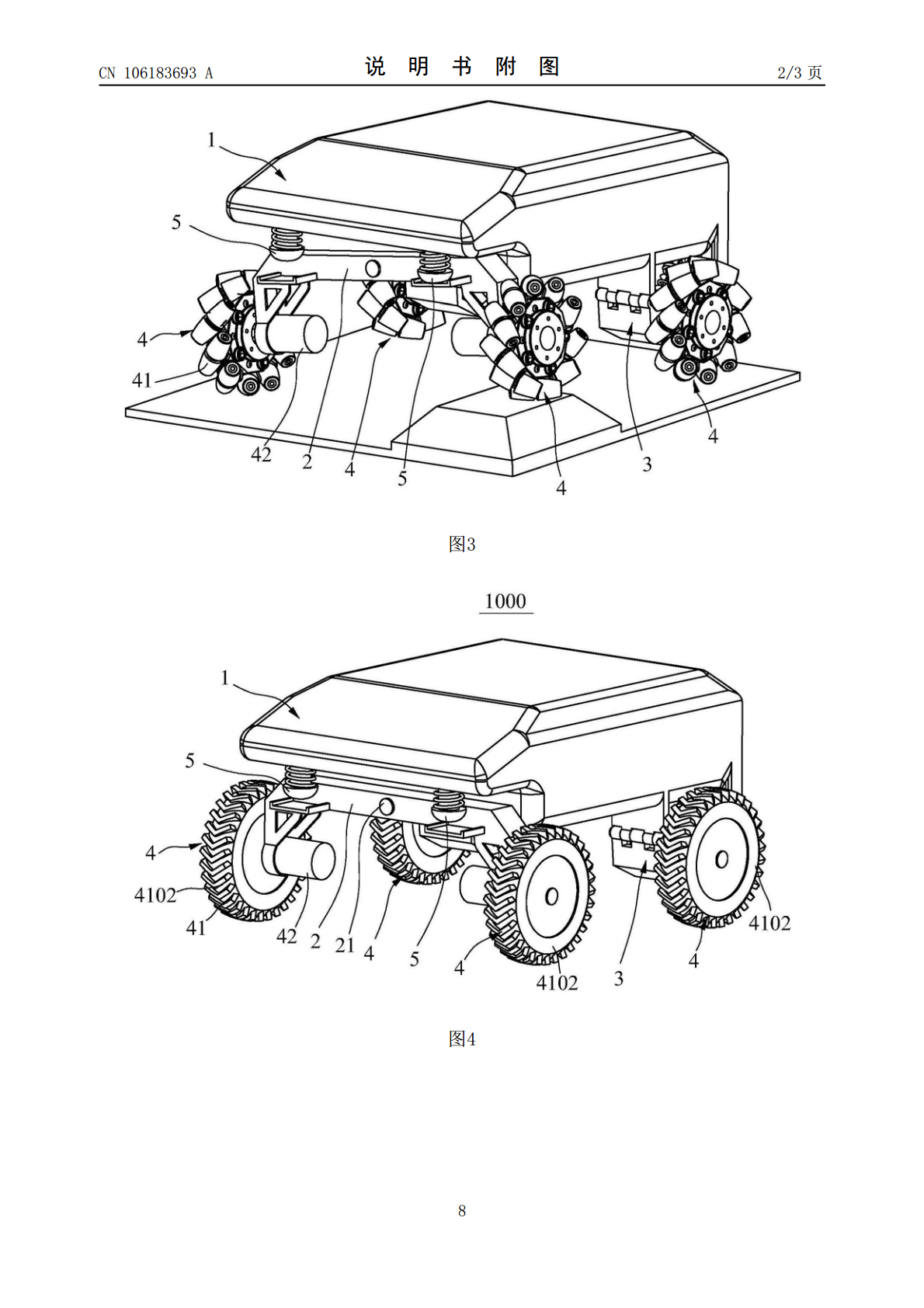
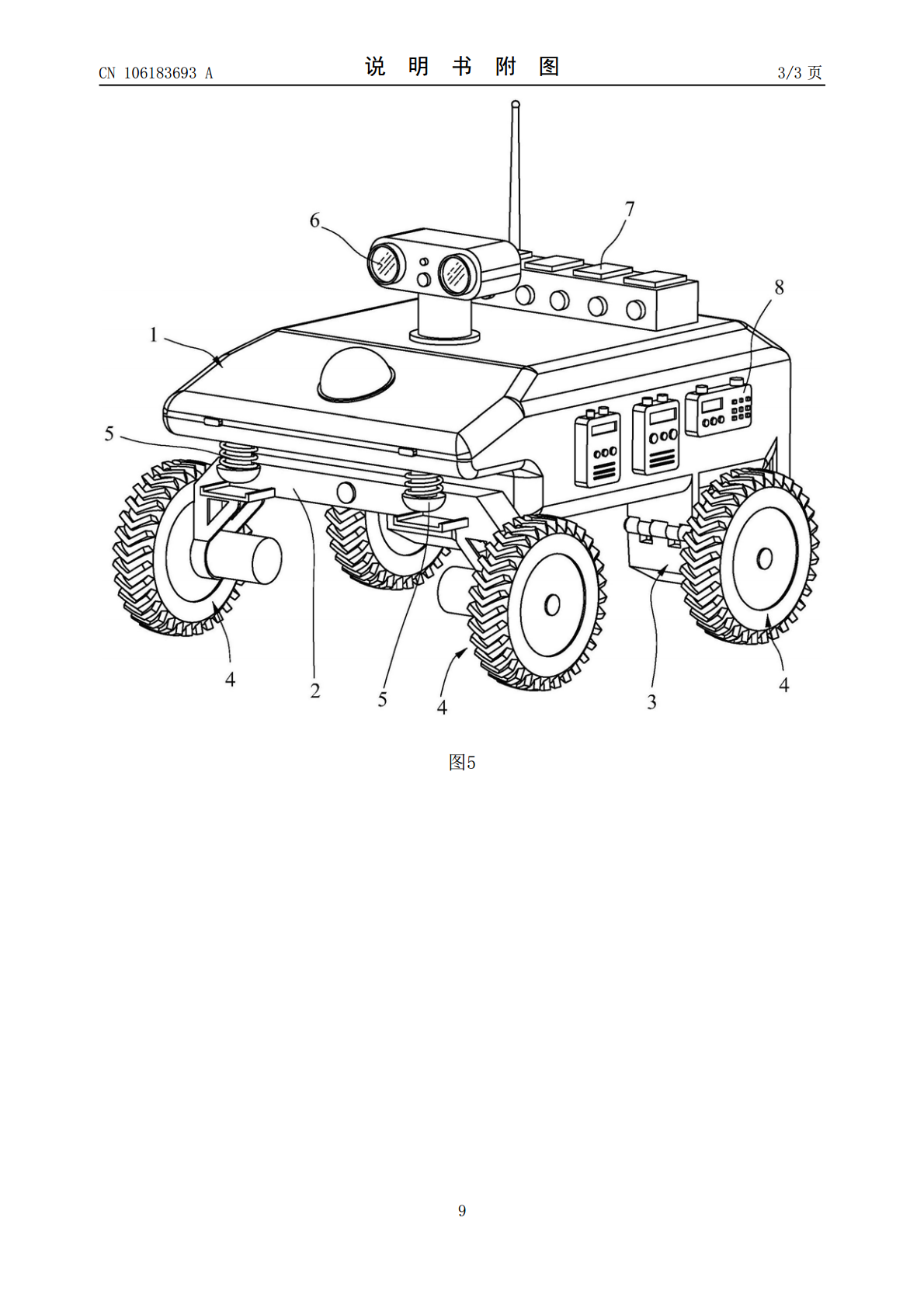
本发明提供一种自适应地形的轮式移动平台,包括主车架、横摆架、铰链悬架与车轮组件;所述横摆架横向布置,横摆架的中部与主车架一端中部以转动副相连;铰链悬架为两个,分别与主车架的另一端的两侧相连,且铰链悬架包括:摇架,摇架上端与主车架铰连,摇架的摆动平面平行于主车架的侧面;缓冲元件,缓冲元件的两端分别与主车架、摇架下端铰连;车轮组件有四个,两个车轮组件与横摆架的两端相连,另两个车轮组件分别与两个摇架相连;所述车轮组件包括车轮、车轮驱动件,所述车轮驱动件驱动车轮转动。因为使用了横摆架与铰链悬架使得车轮组件能够自适
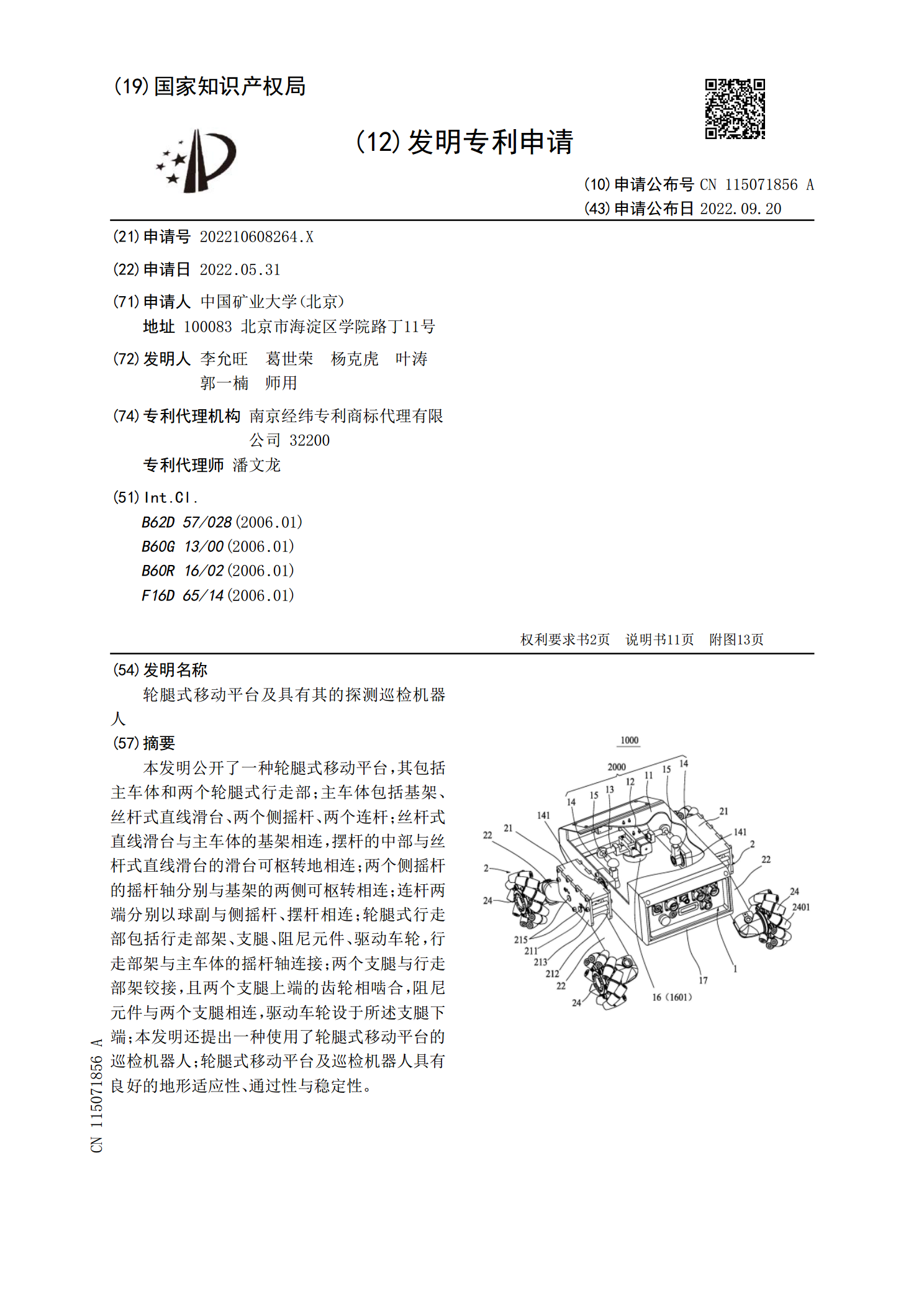
轮腿式移动平台及具有其的探测巡检机器人.pdf
本发明公开了一种轮腿式移动平台,其包括主车体和两个轮腿式行走部;主车体包括基架、丝杆式直线滑台、两个侧摇杆、两个连杆;丝杆式直线滑台与主车体的基架相连,摆杆的中部与丝杆式直线滑台的滑台可枢转地相连;两个侧摇杆的摇杆轴分别与基架的两侧可枢转相连;连杆两端分别以球副与侧摇杆、摆杆相连;轮腿式行走部包括行走部架、支腿、阻尼元件、驱动车轮,行走部架与主车体的摇杆轴连接;两个支腿与行走部架铰接,且两个支腿上端的齿轮相啮合,阻尼元件与两个支腿相连,驱动车轮设于所述支腿下端;本发明还提出一种使用了轮腿式移动平台的巡检机

轮履变换移动底盘及具有其的消防探测机器人.pdf
本发明提供一种轮履变换移动底盘,包括:主车架、履带行走部、变形轮式行走部;履带行走部为两组且设于主车架的两侧;变形轮式行走部为两个,与主车架相连,且变形轮式行走部包括:固定架,所述固定架与主车架固定连接;摆架,所述摆架为两个,摆架的上端与固定架可枢转地相连,且摆架的上端设有齿轮,两个齿轮相互啮合;轮式行走组件,所述轮式行走组件与摆架的下端相连,轮式行走组件包括车轮、车轮驱动件;变形驱动件,所述变形驱动件与摆架相连并驱动两个摆架的夹角变化。所述轮履变换移动底盘通过两个摆架夹角的变化,实现履带式行走模式与轮式

宽度可调的移动平台及具有其的机器人.pdf
一种宽度可调的移动平台,其包括主车体、行走部和宽度调节装置;宽度调节装置包括两个通过第一枢转轴和第二枢转轴相铰连的连杆组件,所述连杆组件包括两个设有端齿轮的连杆,两个所述连杆均与侧座可枢转地相连,且两个所述端齿轮相互啮合;丝杠分别与所述第一枢转轴和所述第二枢转轴构成转动副和螺纹副;驱动单元驱动所述丝杆转动;连接座包括丝杠连接件与固定连接件且两者相连,所述丝杠连接件的定中槽孔套装在所述丝杠上;所述固定连接件与所述侧座构成移动副且与所述主车体相连;所述侧座分别与两个行走部相连。驱动单元驱动丝杆可使得两个行走部
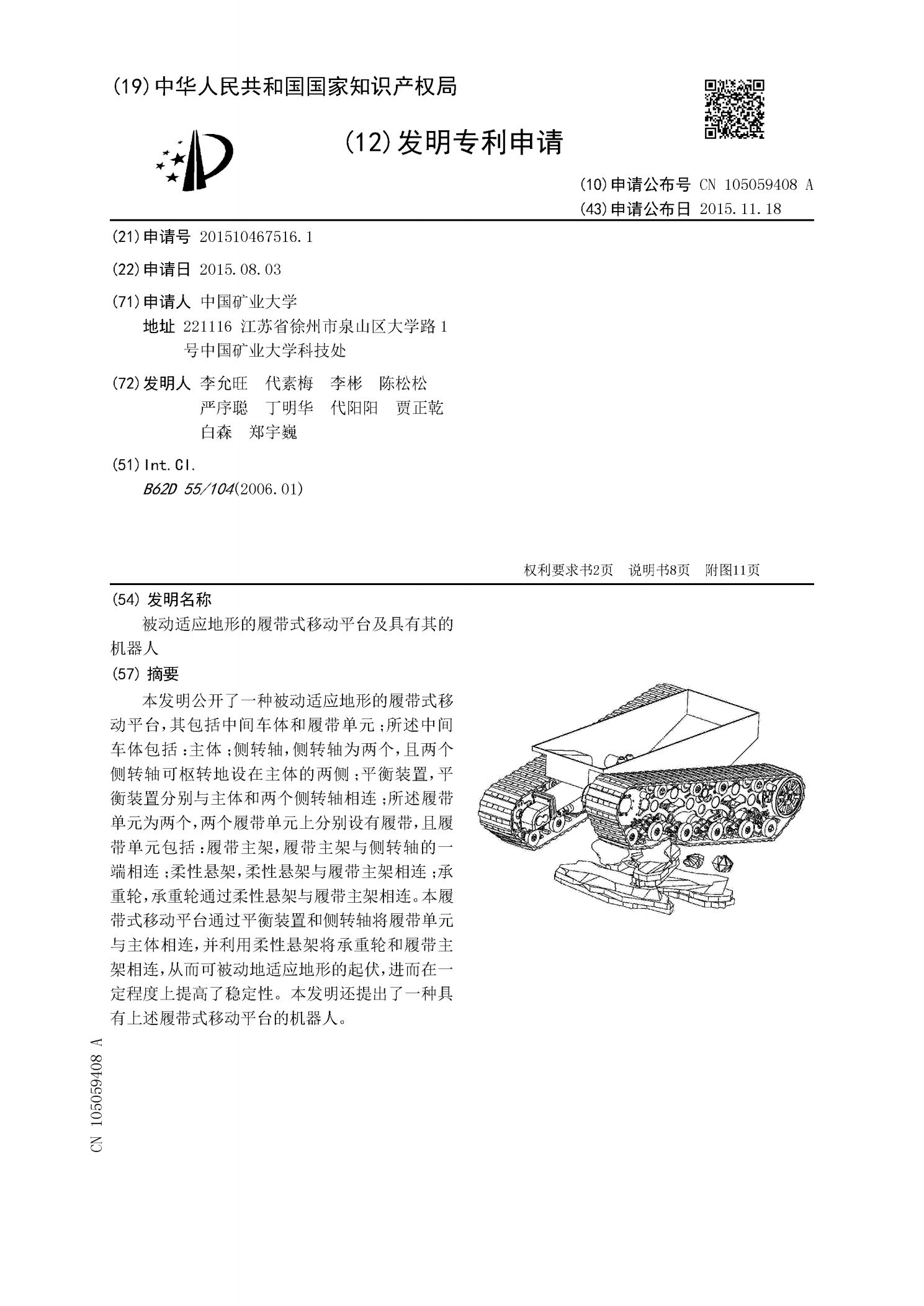
被动适应地形的履带式移动平台及具有其的机器人.pdf
本发明公开了一种被动适应地形的履带式移动平台,其包括中间车体和履带单元;所述中间车体包括:主体;侧转轴,侧转轴为两个,且两个侧转轴可枢转地设在主体的两侧;平衡装置,平衡装置分别与主体和两个侧转轴相连;所述履带单元为两个,两个履带单元上分别设有履带,且履带单元包括:履带主架,履带主架与侧转轴的一端相连;柔性悬架,柔性悬架与履带主架相连;承重轮,承重轮通过柔性悬架与履带主架相连。本履带式移动平台通过平衡装置和侧转轴将履带单元与主体相连,并利用柔性悬架将承重轮和履带主架相连,从而可被动地适应地形的起伏,进而在一