
一种基于激光雷达的船舶靠泊检测系统和方法.pdf

一条****ee


1/10
2/10
3/10

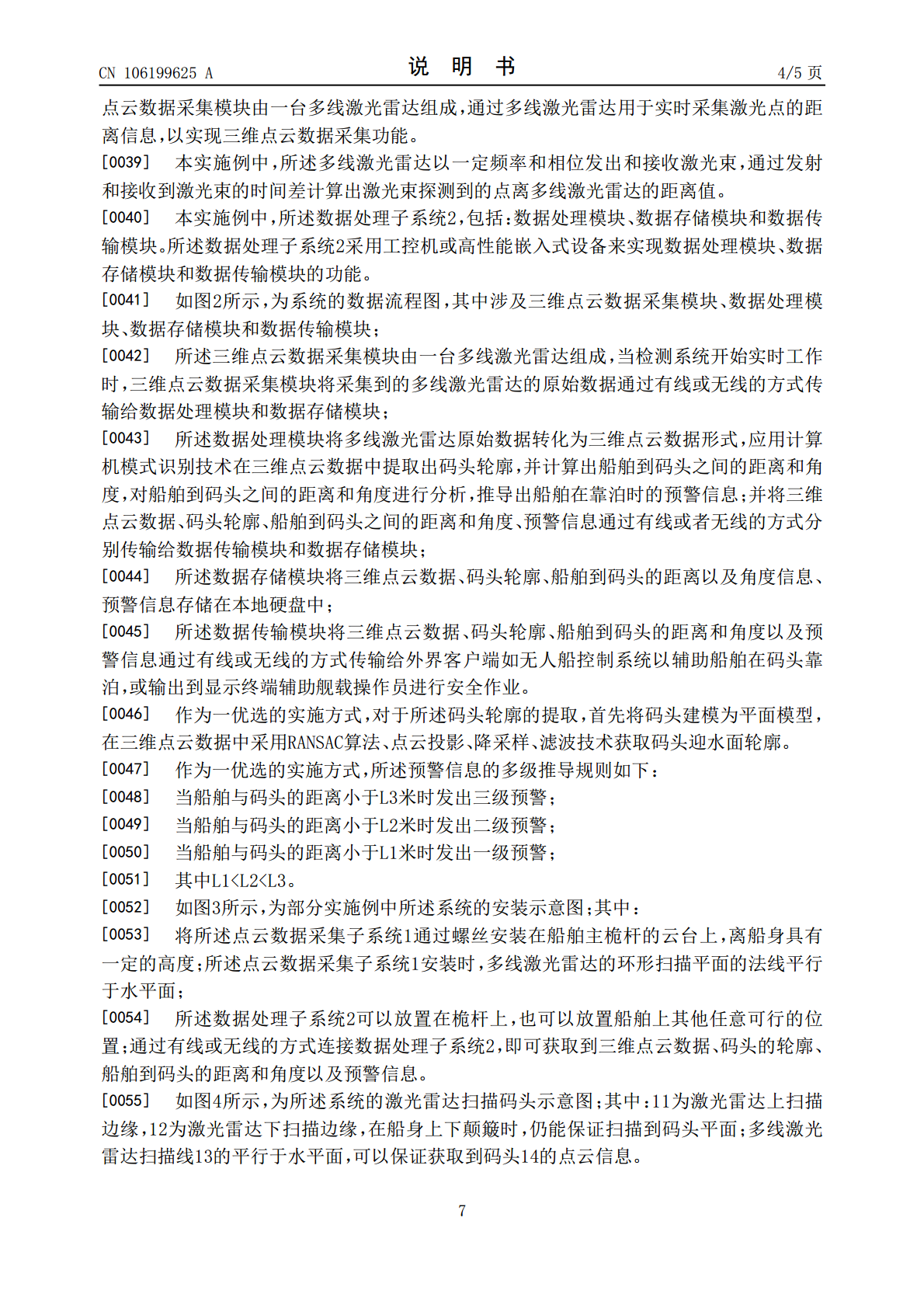
4/10
5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于激光雷达的船舶靠泊检测系统和方法.pdf
本发明提供了一种基于激光雷达的船舶靠泊检测系统和方法,包括点云数据采集子系统和数据处理子系统,点云数据采集子系统包括三维点云数据采集模块,三维点云数据采集模块为多线激光雷达,多线激光雷达实现码头点云数据的采集功能;数据处理子系统包括数据处理模块、数据存储模块和数据传输模块,数据处理子系统由工控机或者嵌入式设备来实现数据处理、数据存储和数据传输功能。本发明通过点云数据采集子系统采集码头数据,经过数据处理子系统处理,通过有线或者无线的方式将三维点云信息、码头的轮廓信息、船舶到码头的距离和角度以及计算得出的预警

一种基于UWB的船舶靠泊辅助方法和系统.pdf
本发明提供一种基于UWB的船舶靠泊辅助方法和系统,所述系统包括数据采集平台、数据处理平台和数据显示平台;方法包括:1、数据采集模块实时采集UWB节点信息,并将信息发送到数据处理模块;2、数据处理模块实时对步骤1传输的信息进行处理,获得码头和船舶的轮廓、船舶到码头的距离、角度和相对速度以及预警信息;数据存储模块实时保存上述得到的信息,同时通过数据传输模块将信息发送给数据显示平台,外界客户端利用这些信息辅助船舶在码头靠泊;重复步骤1到步骤3,进行数据实时更新,实现码头靠泊辅助功能。本发明通过UWB定位技术、网

船舶靠泊系统.pdf
本发明提供一种船舶靠泊系统。其包括:承载支座,固定设置在船舶上;安装座,与承载支座连接;连接件,与安装座连接;与连接件配合作用实现靠泊的俘获部,固定设置在靠泊对象上;以及,调节部,包括竖向调节部,竖向调节部设置在承载支座上,且与安装座驱动连接;竖向调节部用于驱动安装座沿承载支座竖向移动,以及在靠泊时对安装座施加阻止竖向移动的第一阻力。该船舶靠泊系统系留稳定。

一种基于双目立体视觉的船舶靠泊辅助系统及方法.pdf
本发明提供了一种基于双目立体视觉的船舶靠泊辅助系统及方法,系统由数据采集平台和数据处理平台构成,其中:数据采集平台包含数据采集模块,数据采集模块由双目相机和嵌入式处理器组成,来实现数据采集模块功能;数据处理平台包含数据处理模块、数据存储模块和数据传输模块,数据处理平台采用工控机或高性能嵌入式设备来实现数据处理、数据存储和数据传输模块的功能。本发明采用有线或无线连接的方式实现将双目左/右图像、码头的轮廓、船舶到码头的距离和角度以及预警信息传输给外界客户端以辅助船舶靠泊,或传输到显示终端辅助舰载操作员安全作业
一种基于三维激光雷达的码头靠泊安全监测系统及其方法.pdf
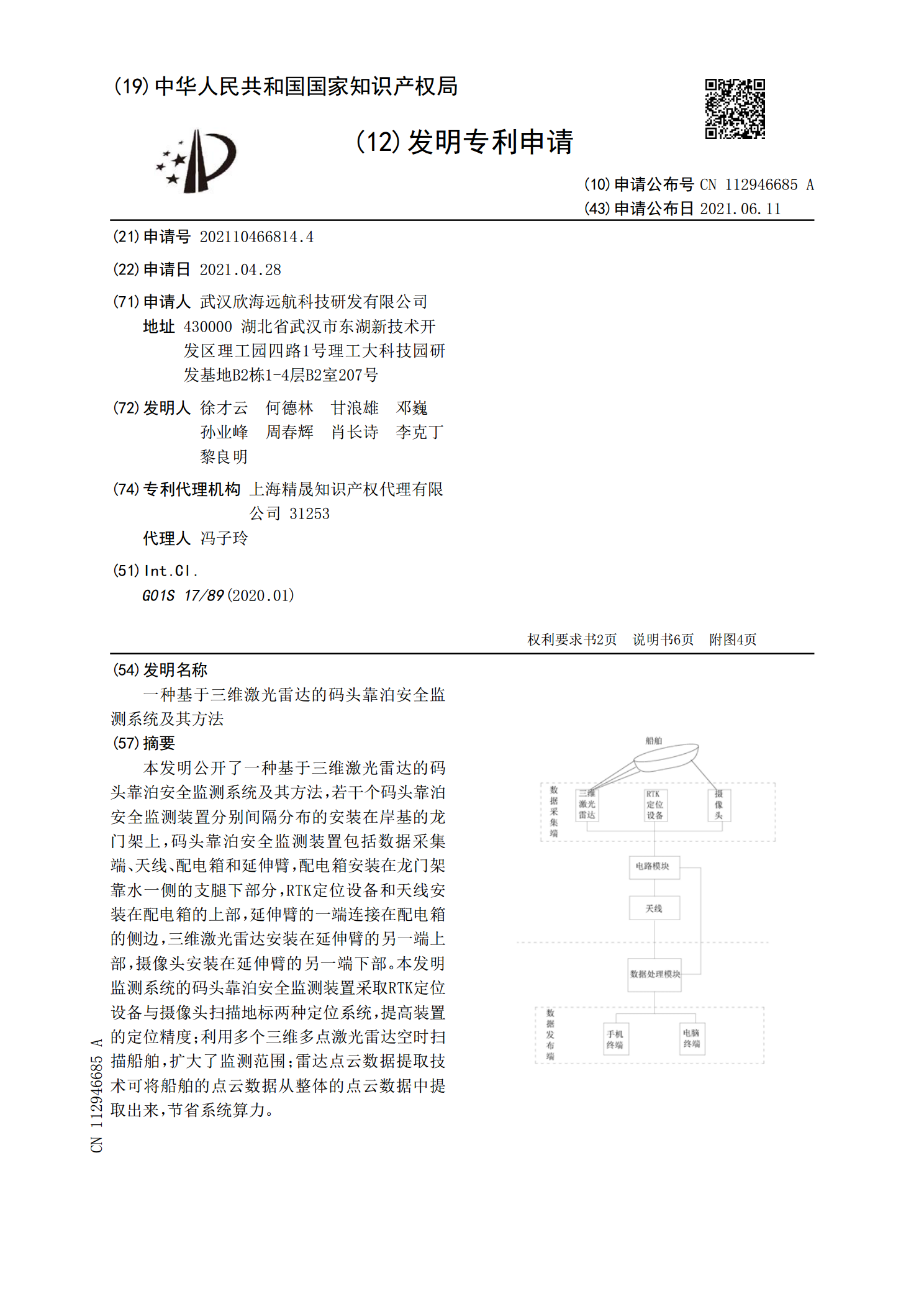
本发明公开了一种基于三维激光雷达的码头靠泊安全监测系统及其方法,若干个码头靠泊安全监测装置分别间隔分布的安装在岸基的龙门架上,码头靠泊安全监测装置包括数据采集端、天线、配电箱和延伸臂,配电箱安装在龙门架靠水一侧的支腿下部分,RTK定位设备和天线安装在配电箱的上部,延伸臂的一端连接在配电箱的侧边,三维激光雷达安装在延伸臂的另一端上部,摄像头安装在延伸臂的另一端下部。本发明监测系统的码头靠泊安全监测装置采取RTK定位设备与摄像头扫描地标两种定位系统,提高装置的定位精度;利用多个三维多点激光雷达空时扫描船舶,扩