
一种基于计算机视觉的学生跟踪方法和装置.pdf

霞英****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于计算机视觉的学生跟踪方法和装置.pdf
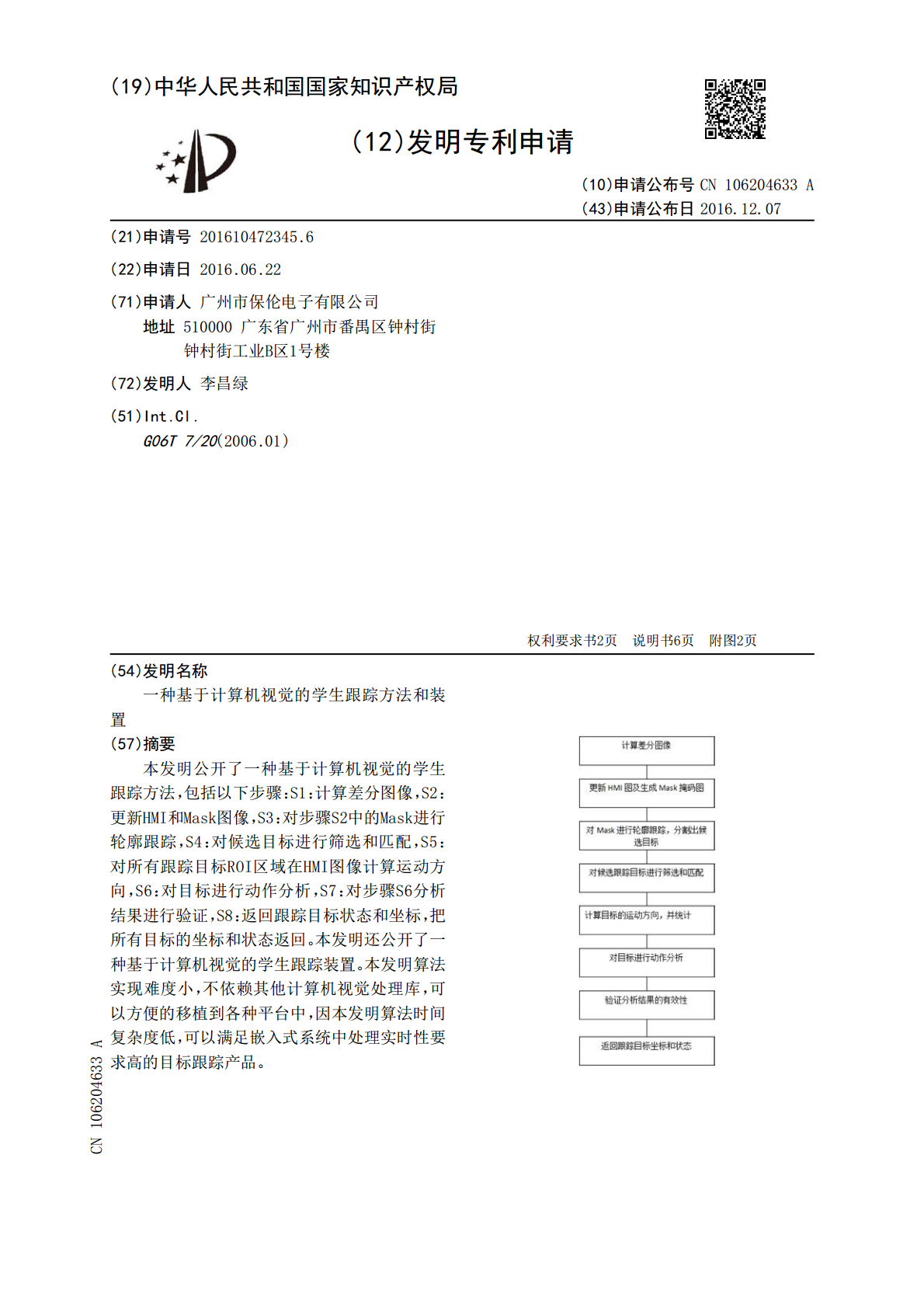
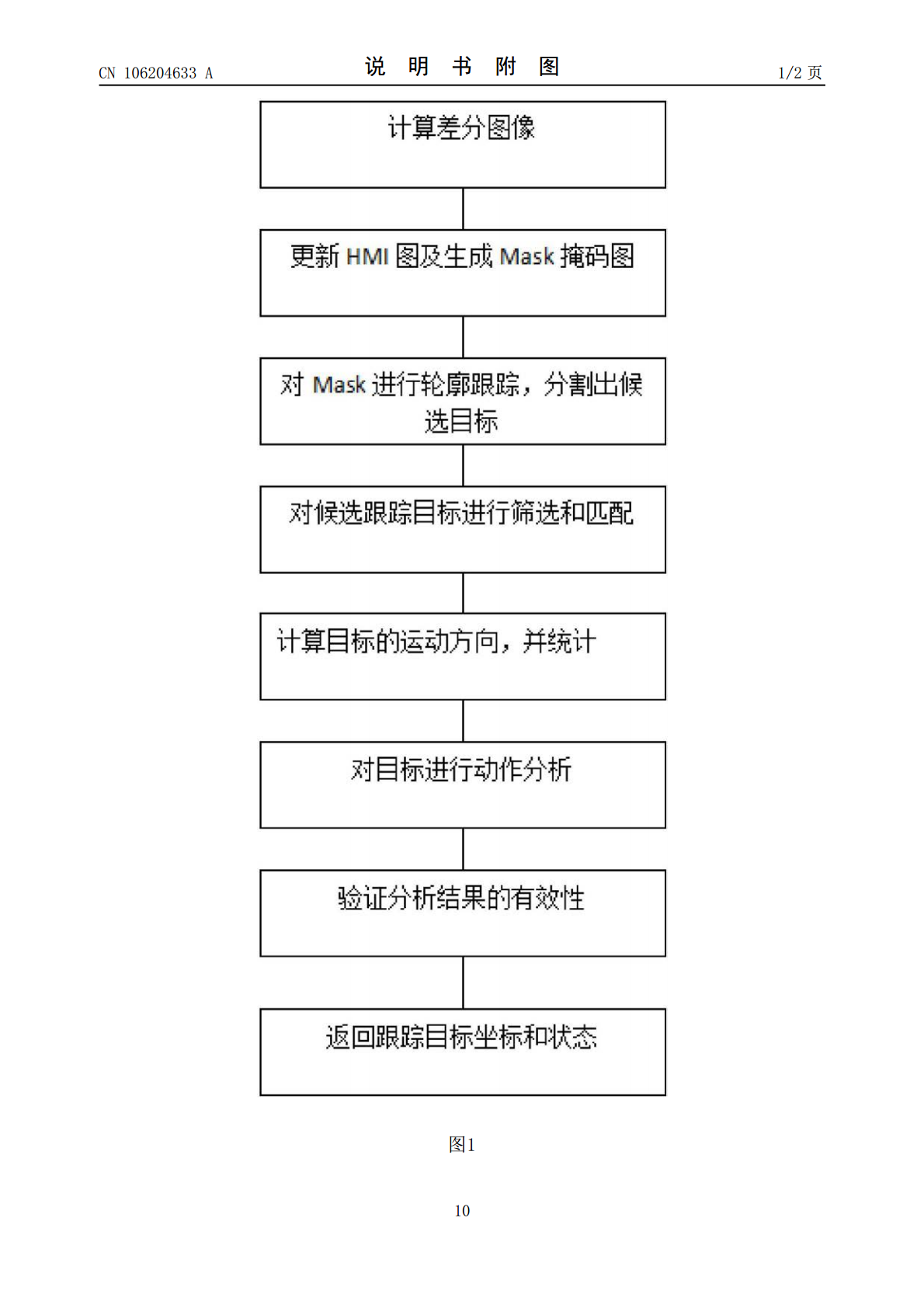
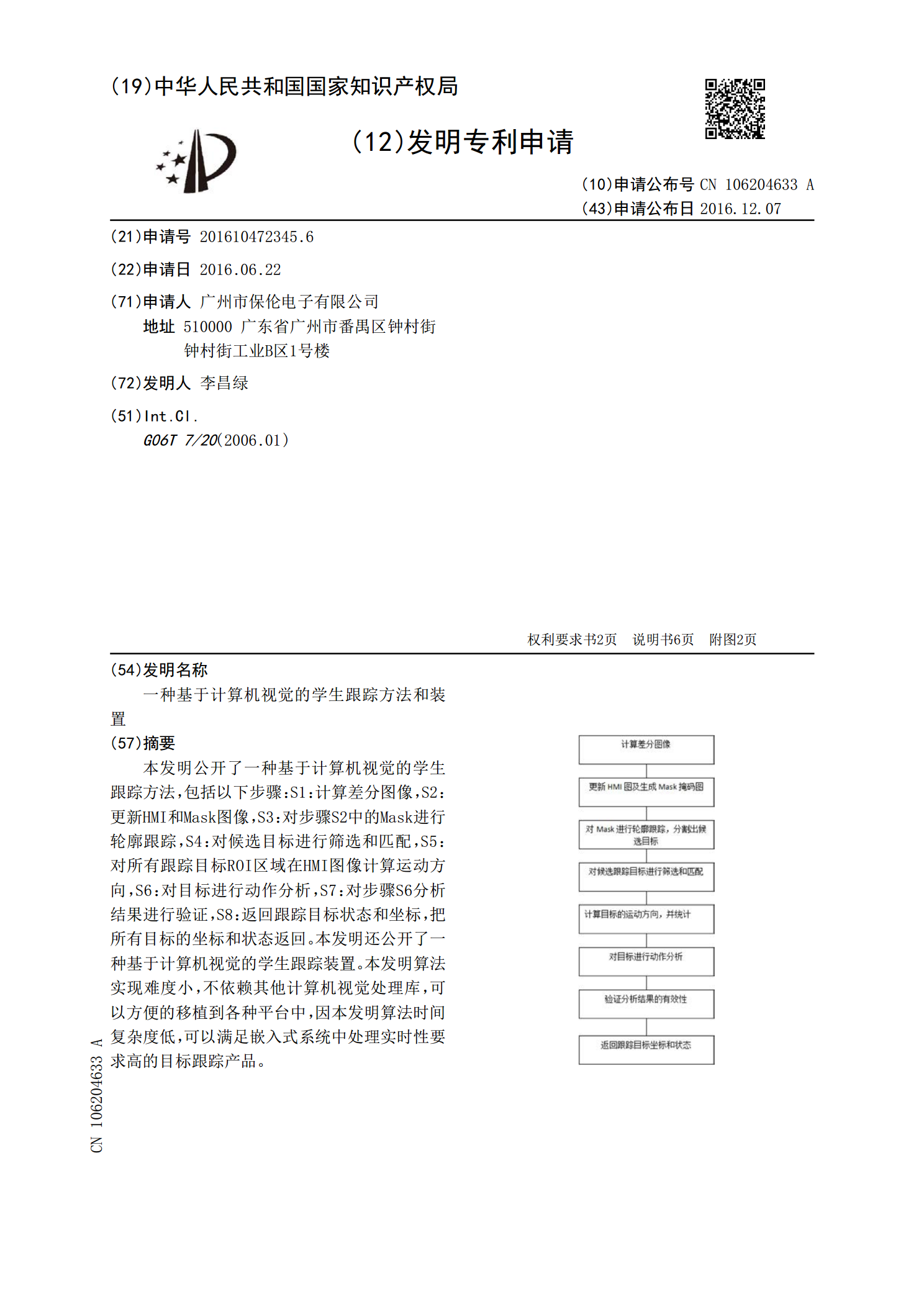
本发明公开了一种基于计算机视觉的学生跟踪方法,包括以下步骤:S1:计算差分图像,S2:更新HMI和Mask图像,S3:对步骤S2中的Mask进行轮廓跟踪,S4:对候选目标进行筛选和匹配,S5:对所有跟踪目标ROI区域在HMI图像计算运动方向,S6:对目标进行动作分析,S7:对步骤S6分析结果进行验证,S8:返回跟踪目标状态和坐标,把所有目标的坐标和状态返回。本发明还公开了一种基于计算机视觉的学生跟踪装置。本发明算法实现难度小,不依赖其他计算机视觉处理库,可以方便的移植到各种平台中,因本发明算法时间复杂度低
一种视觉跟踪方法和跟踪装置.pdf
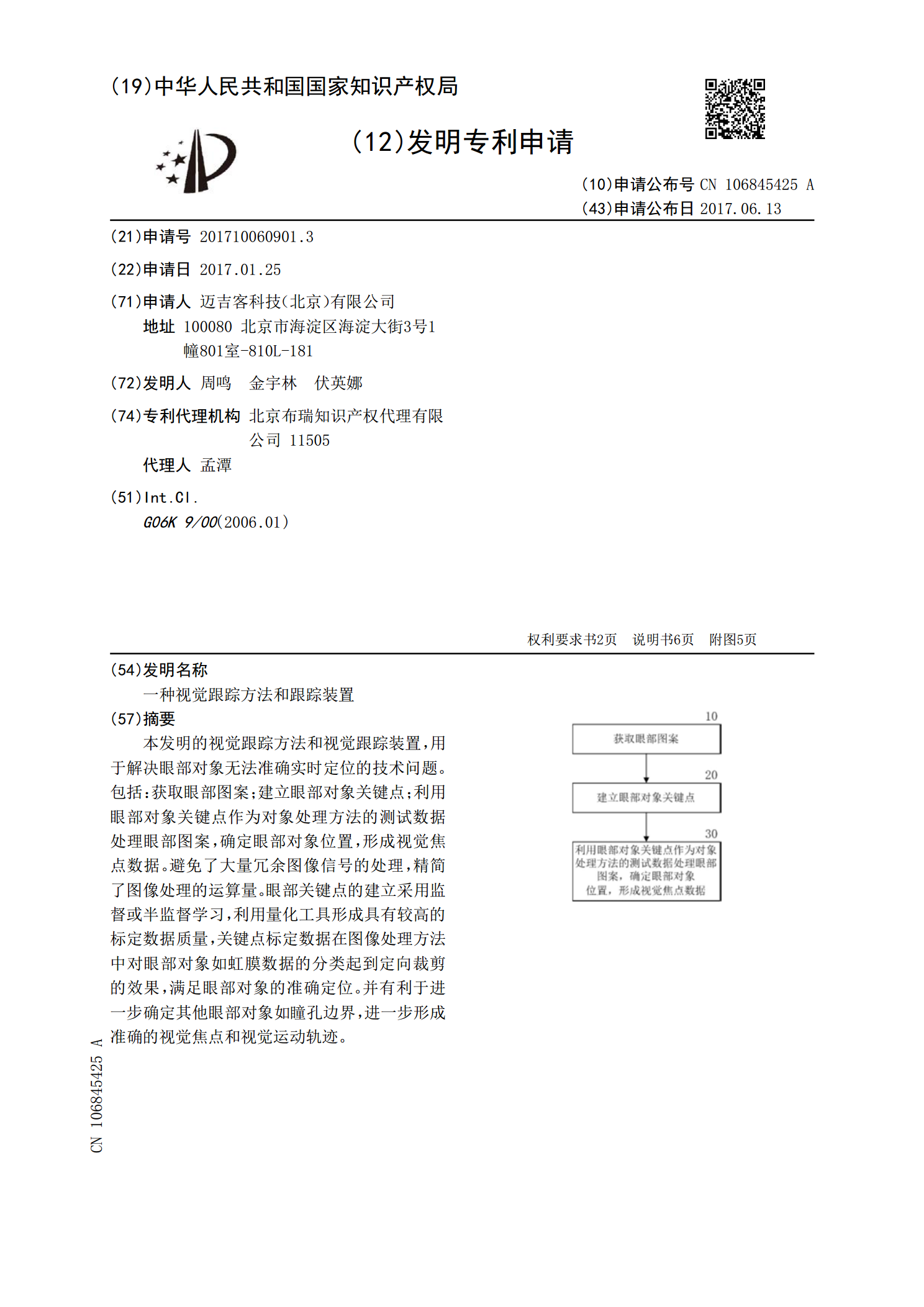
本发明的视觉跟踪方法和视觉跟踪装置,用于解决眼部对象无法准确实时定位的技术问题。包括:获取眼部图案;建立眼部对象关键点;利用眼部对象关键点作为对象处理方法的测试数据处理眼部图案,确定眼部对象位置,形成视觉焦点数据。避免了大量冗余图像信号的处理,精简了图像处理的运算量。眼部关键点的建立采用监督或半监督学习,利用量化工具形成具有较高的标定数据质量,关键点标定数据在图像处理方法中对眼部对象如虹膜数据的分类起到定向裁剪的效果,满足眼部对象的准确定位。并有利于进一步确定其他眼部对象如瞳孔边界,进一步形成准确的视觉焦
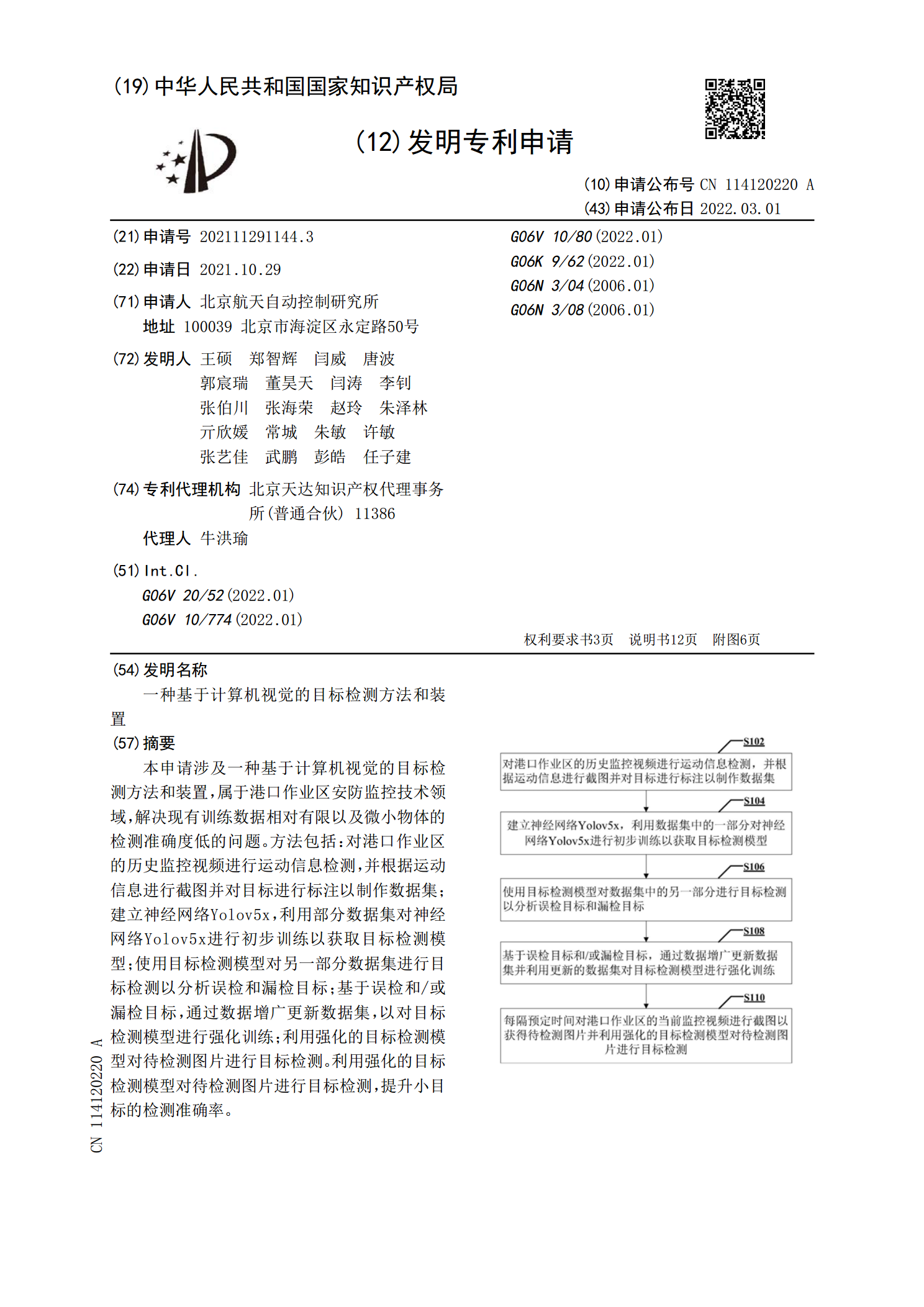
一种基于计算机视觉的目标检测方法和装置.pdf
本申请涉及一种基于计算机视觉的目标检测方法和装置,属于港口作业区安防监控技术领域,解决现有训练数据相对有限以及微小物体的检测准确度低的问题。方法包括:对港口作业区的历史监控视频进行运动信息检测,并根据运动信息进行截图并对目标进行标注以制作数据集;建立神经网络Yolov5x,利用部分数据集对神经网络Yolov5x进行初步训练以获取目标检测模型;使用目标检测模型对另一部分数据集进行目标检测以分析误检和漏检目标;基于误检和/或漏检目标,通过数据增广更新数据集,以对目标检测模型进行强化训练;利用强化的目标检测模型
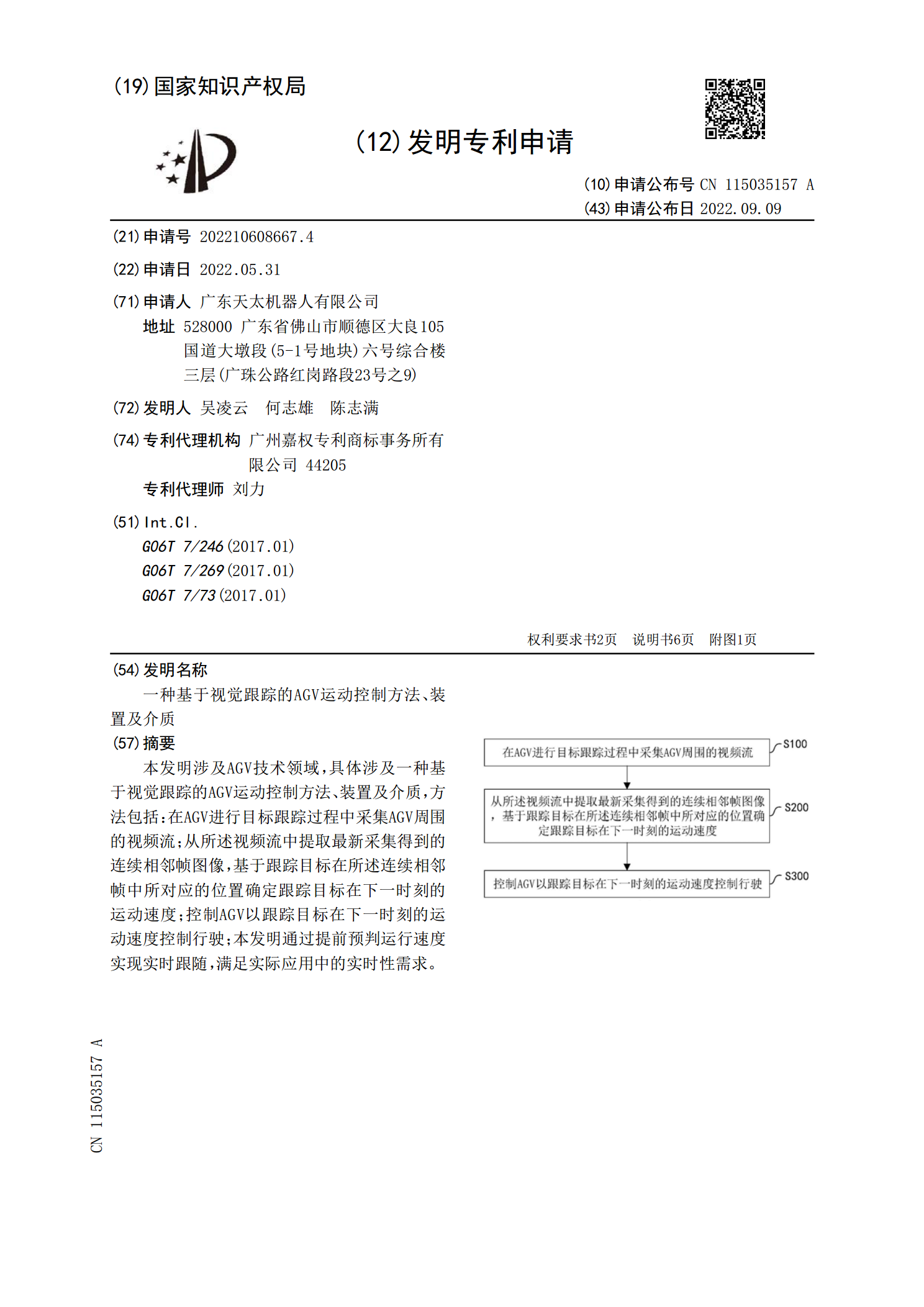
一种基于视觉跟踪的AGV运动控制方法、装置及介质.pdf
本发明涉及AGV技术领域,具体涉及一种基于视觉跟踪的AGV运动控制方法、装置及介质,方法包括:在AGV进行目标跟踪过程中采集AGV周围的视频流;从所述视频流中提取最新采集得到的连续相邻帧图像,基于跟踪目标在所述连续相邻帧中所对应的位置确定跟踪目标在下一时刻的运动速度;控制AGV以跟踪目标在下一时刻的运动速度控制行驶;本发明通过提前预判运行速度实现实时跟随,满足实际应用中的实时性需求。
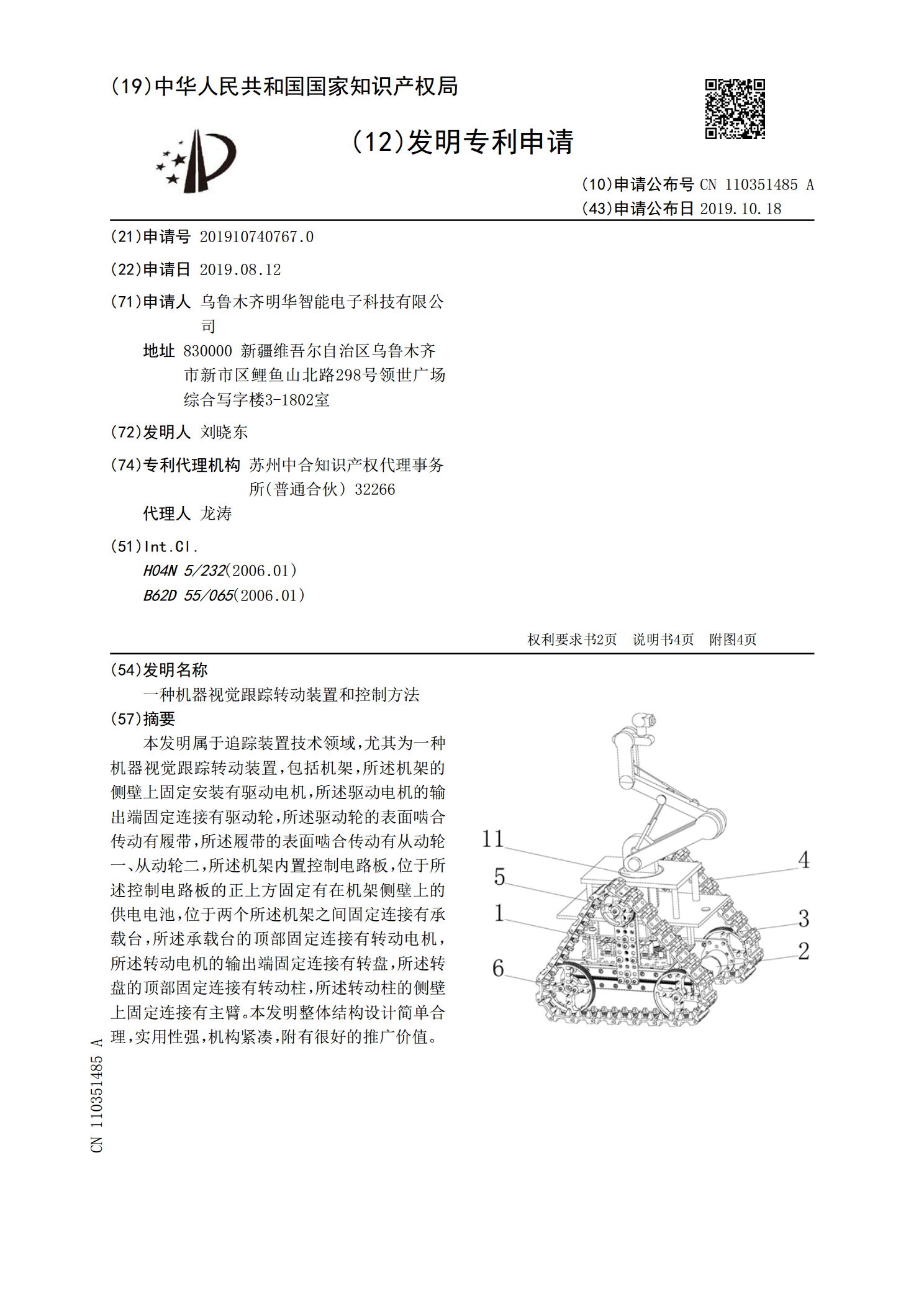
一种机器视觉跟踪转动装置和控制方法.pdf
本发明属于追踪装置技术领域,尤其为一种机器视觉跟踪转动装置,包括机架,所述机架的侧壁上固定安装有驱动电机,所述驱动电机的输出端固定连接有驱动轮,所述驱动轮的表面啮合传动有履带,所述履带的表面啮合传动有从动轮一、从动轮二,所述机架内置控制电路板,位于所述控制电路板的正上方固定有在机架侧壁上的供电电池,位于两个所述机架之间固定连接有承载台,所述承载台的顶部固定连接有转动电机,所述转动电机的输出端固定连接有转盘,所述转盘的顶部固定连接有转动柱,所述转动柱的侧壁上固定连接有主臂。本发明整体结构设计简单合理,实用性