
基于图像的车辆位置获取方法.pdf

An****99


1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于图像的车辆位置获取方法.pdf
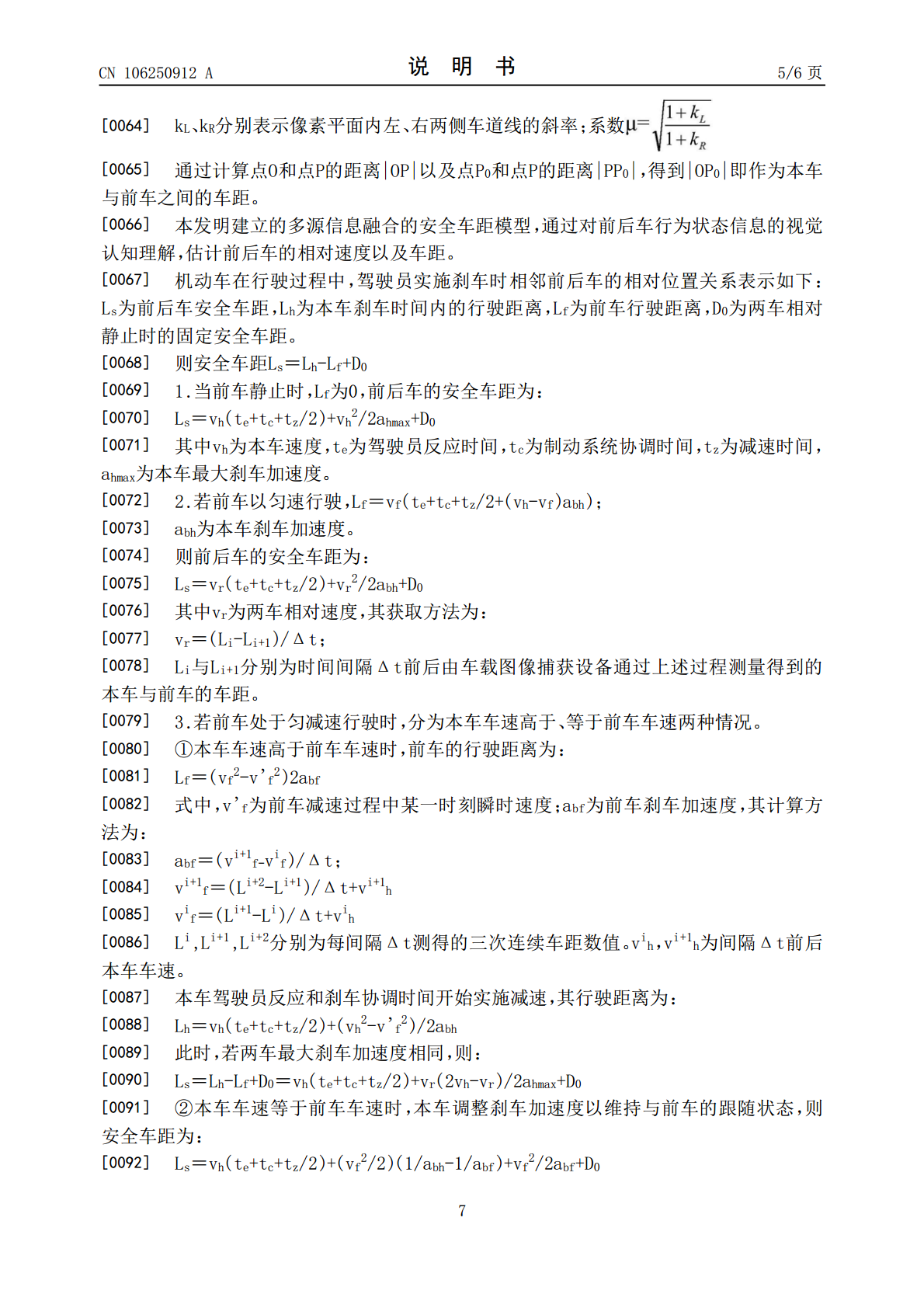
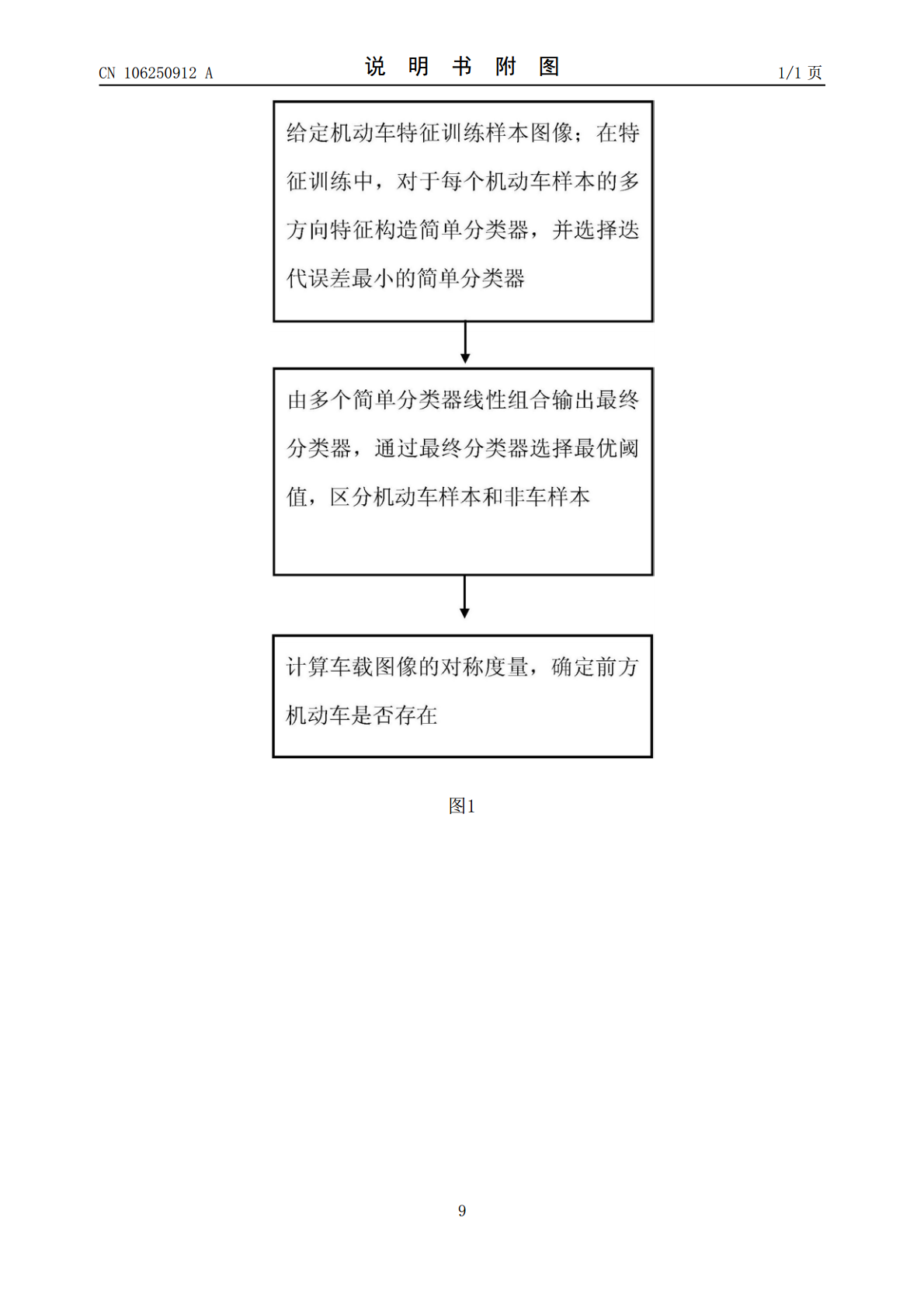
本发明提供了一种基于图像的车辆位置获取方法,该方法包括:给定机动车特征训练样本图像;在特征训练中,对于每个机动车样本的多方向特征构造简单分类器,并选择迭代误差最小的简单分类器;由多个简单分类器线性组合输出最终分类器,通过最终分类器选择最优阈值,区分机动车样本和非车样本;计算车载图像的对称度量,确定前方机动车是否存在。本发明提出了一种基于图像的车辆位置获取方法,在机动车轮廓识别过程中,充分利用多方向特征信息,兼顾识别过程中的实时性与鲁棒性,而在安全车距监控中,根据相邻两车相对行驶的速度多变性给出全面的考虑,

车辆位置获取方法及装置.pdf
本申请提供的车辆位置获取方法及装置,方法包括:获得在检测到定位设备的信号丢失时,基于定位设备对车辆进行最后一次定位得到的位置信息,将该位置信息作为第一位置信息并开始计时,当计时达到预设时长时,获得车辆的行驶速度、轮胎转向角度以及当前档位,并根据行驶速度、轮胎转向角度以及预设时长得到第一行驶路线,根据第一行驶路线和第一位置信息得到第二位置信息,并在当前档位不为驻车档位时,将第二位置信息作为新的第一位置信息,并再次开始计时,直至车辆的当前档位为驻车挡位置时,将获得的第二位置信息作为目标位置信息。通过上述方法,
基于图像识别的轮胎荷载获取方法、车辆称重方法及系统.pdf
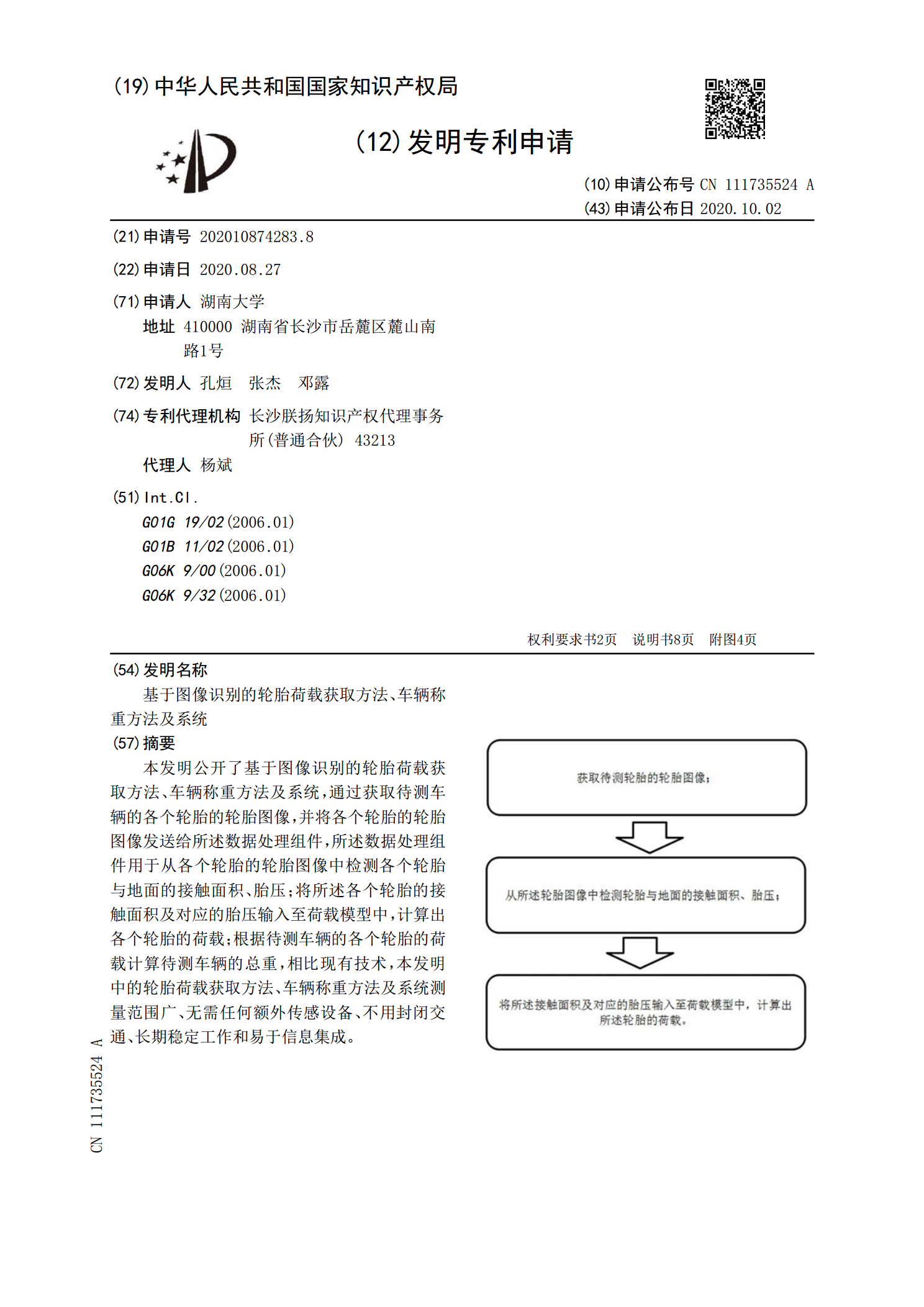
本发明公开了基于图像识别的轮胎荷载获取方法、车辆称重方法及系统,通过获取待测车辆的各个轮胎的轮胎图像,并将各个轮胎的轮胎图像发送给所述数据处理组件,所述数据处理组件用于从各个轮胎的轮胎图像中检测各个轮胎与地面的接触面积、胎压;将所述各个轮胎的接触面积及对应的胎压输入至荷载模型中,计算出各个轮胎的荷载;根据待测车辆的各个轮胎的荷载计算待测车辆的总重,相比现有技术,本发明中的轮胎荷载获取方法、车辆称重方法及系统测量范围广、无需任何额外传感设备、不用封闭交通、长期稳定工作和易于信息集成。
一种基于图像拼接获取车辆信息的方法及系统.pdf
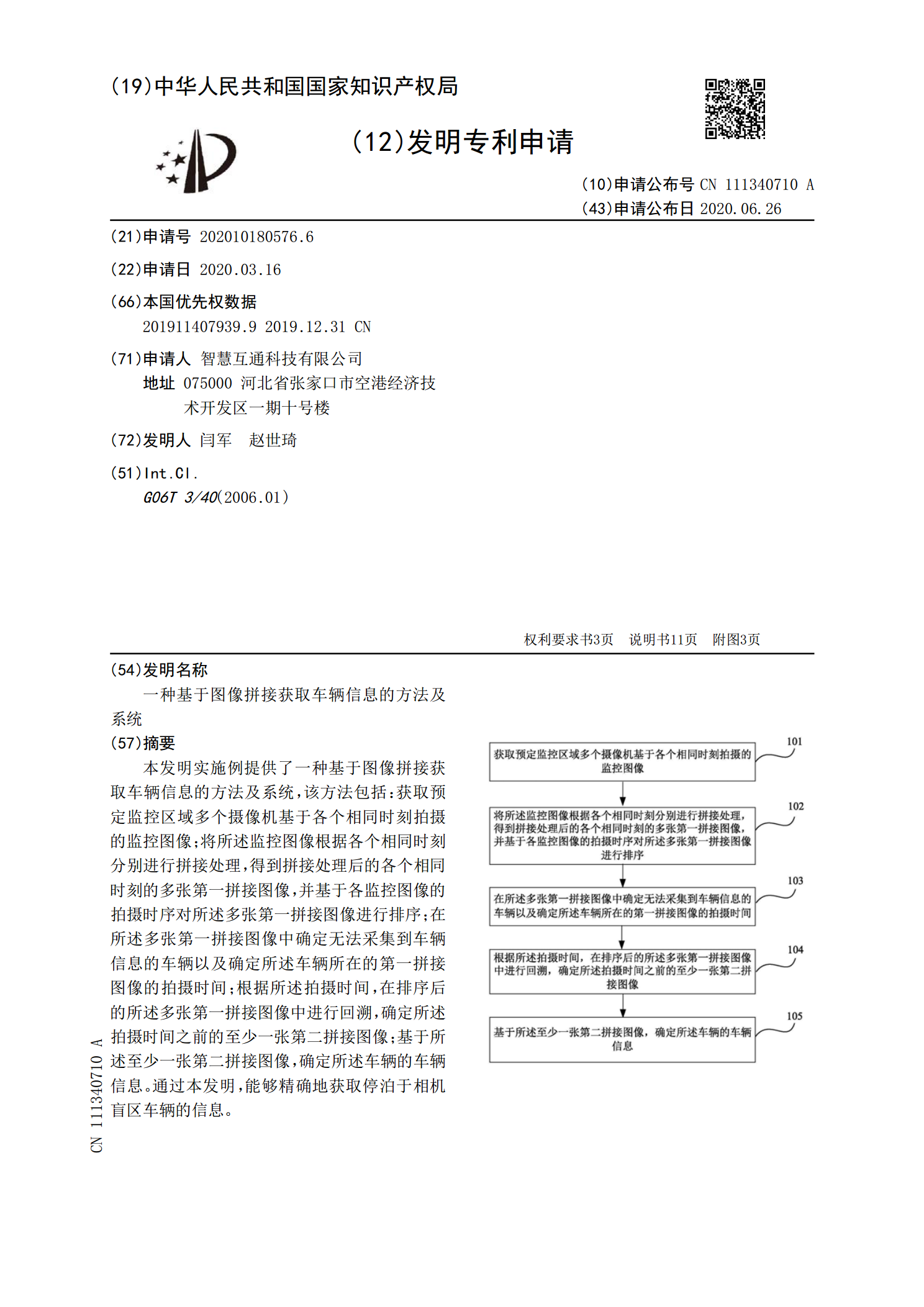
本发明实施例提供了一种基于图像拼接获取车辆信息的方法及系统,该方法包括:获取预定监控区域多个摄像机基于各个相同时刻拍摄的监控图像;将所述监控图像根据各个相同时刻分别进行拼接处理,得到拼接处理后的各个相同时刻的多张第一拼接图像,并基于各监控图像的拍摄时序对所述多张第一拼接图像进行排序;在所述多张第一拼接图像中确定无法采集到车辆信息的车辆以及确定所述车辆所在的第一拼接图像的拍摄时间;根据所述拍摄时间,在排序后的所述多张第一拼接图像中进行回溯,确定所述拍摄时间之前的至少一张第二拼接图像;基于所述至少一张第二拼接

基于图像的深度获取方法研究.docx
基于图像的深度获取方法研究基于图像的深度获取方法研究摘要:深度获取是计算机视觉领域的重要问题之一。在许多应用中,获取场景的深度信息对于实现精确的三维重建、物体识别和跟踪等任务至关重要。本论文对基于图像的深度获取方法进行了研究和探讨。首先介绍了深度获取的意义和应用,然后分析了传统的深度获取方法的局限性,接着详细讨论了基于图像的深度获取方法,包括视差法、结构光法和深度学习方法。最后对这些方法进行对比分析,总结了各自的优缺点,并展望了未来的发展方向。1.引言深度获取是计算机视觉和计算机图形学领域的关键问题之一。