
一种西林瓶无损抓取装置.pdf

一吃****成益


1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种西林瓶无损抓取装置.pdf
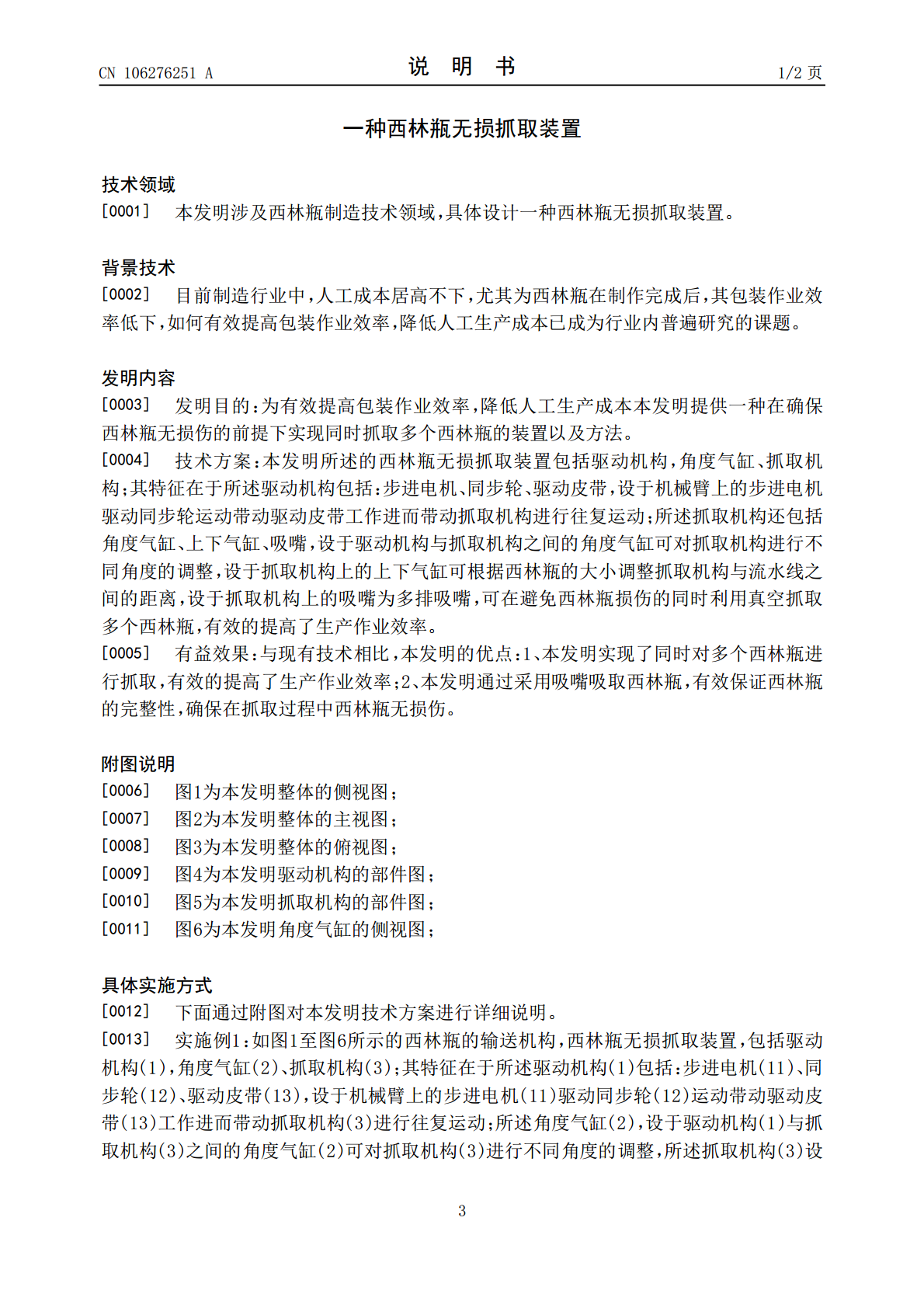
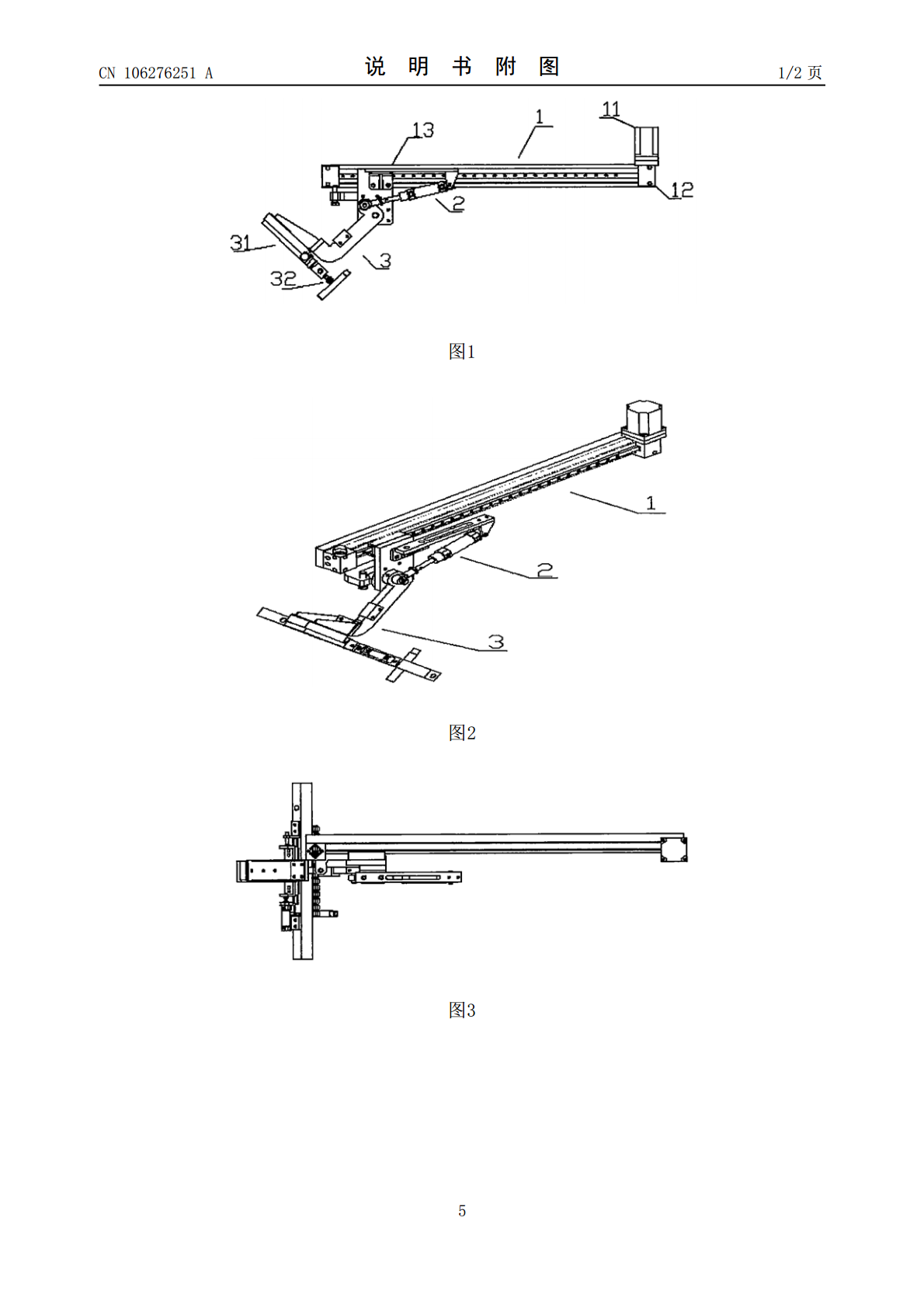
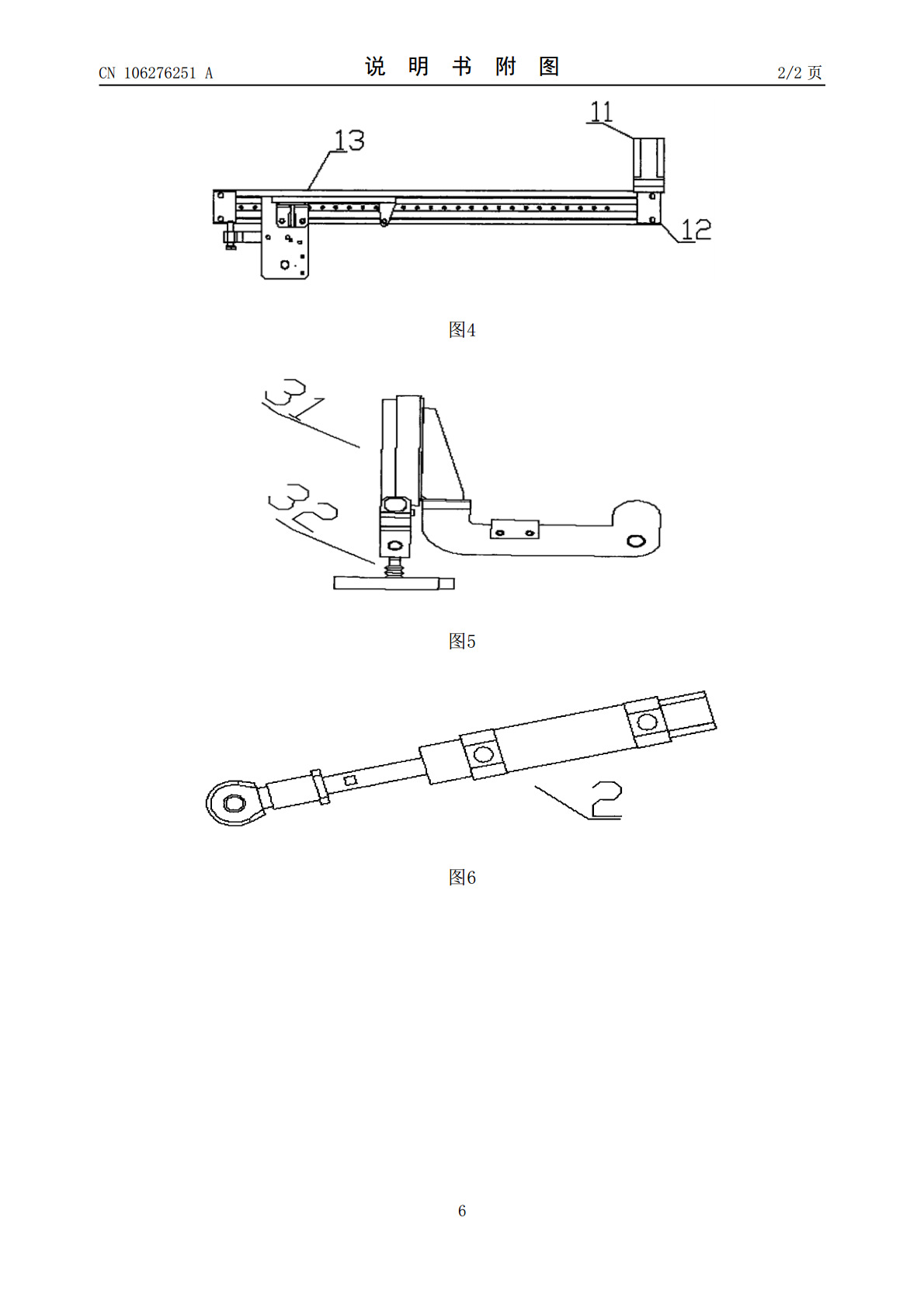
本发明公开了一种西林瓶无损抓取装置,包括驱动机构、抓取机构角度气缸,驱动机构包括步进电机、同步轮、驱动皮带;抓取机构包括机械臂、上下气缸、吸嘴;步进电机驱动同步轮运动带动驱动皮带工作进而带动抓取机构进行往复运动,角度气缸带动抓取机构进行不同角度的调整;本发明采用多排吸嘴接触西林瓶,代替了人工作业,提高了生产效率的同时保证了西林瓶的无损伤。
一种液态瓶自动抓取装置.pdf
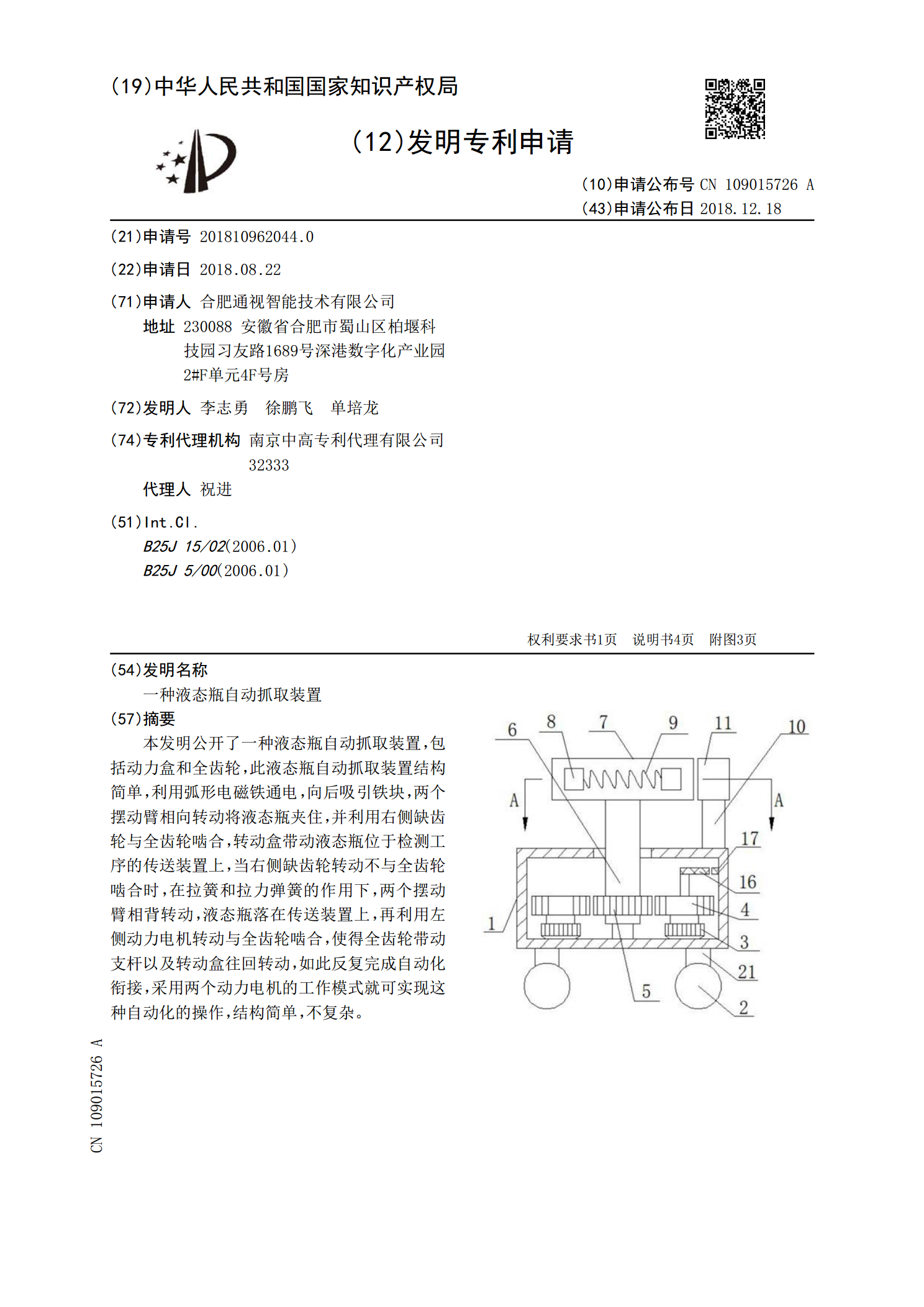
本发明公开了一种液态瓶自动抓取装置,包括动力盒和全齿轮,此液态瓶自动抓取装置结构简单,利用弧形电磁铁通电,向后吸引铁块,两个摆动臂相向转动将液态瓶夹住,并利用右侧缺齿轮与全齿轮啮合,转动盒带动液态瓶位于检测工序的传送装置上,当右侧缺齿轮转动不与全齿轮啮合时,在拉簧和拉力弹簧的作用下,两个摆动臂相背转动,液态瓶落在传送装置上,再利用左侧动力电机转动与全齿轮啮合,使得全齿轮带动支杆以及转动盒往回转动,如此反复完成自动化衔接,采用两个动力电机的工作模式就可实现这种自动化的操作,结构简单,不复杂。
一种膨胀装置抓取果蔬的无损采摘机械手.pdf
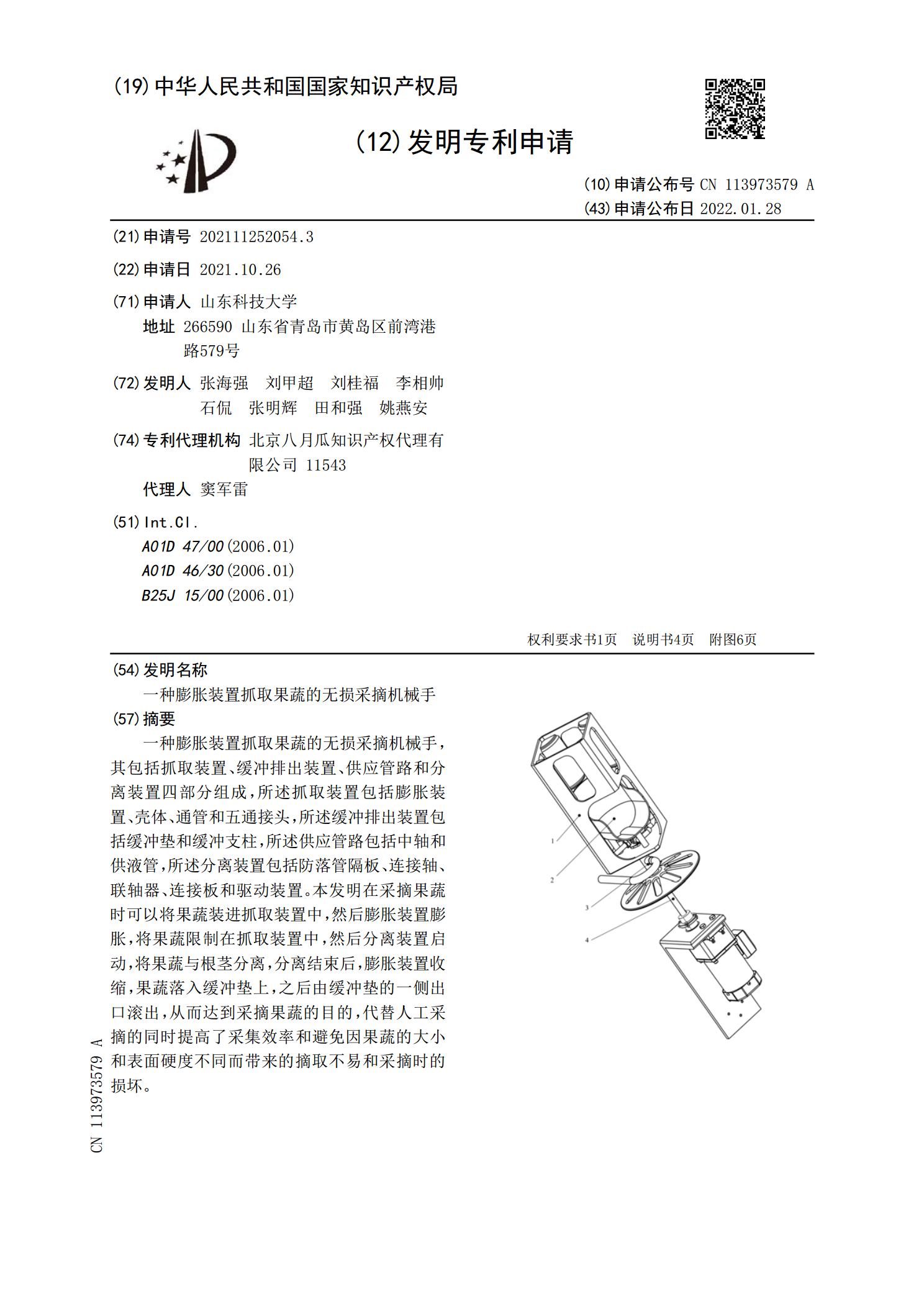
一种膨胀装置抓取果蔬的无损采摘机械手,其包括抓取装置、缓冲排出装置、供应管路和分离装置四部分组成,所述抓取装置包括膨胀装置、壳体、通管和五通接头,所述缓冲排出装置包括缓冲垫和缓冲支柱,所述供应管路包括中轴和供液管,所述分离装置包括防落管隔板、连接轴、联轴器、连接板和驱动装置。本发明在采摘果蔬时可以将果蔬装进抓取装置中,然后膨胀装置膨胀,将果蔬限制在抓取装置中,然后分离装置启动,将果蔬与根茎分离,分离结束后,膨胀装置收缩,果蔬落入缓冲垫上,之后由缓冲垫的一侧出口滚出,从而达到采摘果蔬的目的,代替人工采摘的同

一种西林瓶在线检测装置.pdf
本发明公开了一种西林瓶在线检测装置,旨在提供一种能够实现在线自动检测西林瓶的长度和/或西林瓶的底凹深度,从而提高检测效率,降低劳动强度与人工本的西林瓶在线检测装置。它包括用于输送西林瓶的输送带,支撑架;西林瓶定位装置,西林瓶定位装置包括设置在支撑架上的开口朝上的定位槽,且定位槽位于输送带的上方;西林瓶检测装置,西林瓶检测装置用于检测定位槽内的西林瓶的长度和/或西林瓶的底凹深度;西林瓶上下料装置,西林瓶上下料装置用于将输送带上的未经西林瓶检测装置检测的西林瓶抓取放置到定位槽上以及用于将定位槽上经西林瓶检测装

一种西林瓶拆包装置.pdf
本发明涉及医药注射器预灌封技术领域,公开了一种西林瓶拆包装置,包括滑台、切割机构、去膜机构和扣瓶机构,滑台沿x轴方向设置,切割机构和扣瓶机构分别设于滑台的两侧,切割机构包括割刀,割刀可沿x轴方向、y轴方向和z轴方向移动设置,扣瓶机构包括支架和用于扣在西林瓶组顶部的扣盖,支架可沿x轴方向移动,扣盖可沿z轴方向移动地连接在支架上,去膜机构设于滑台的一侧,去膜机构包括取出装置,取出装置可沿y轴方向和z轴方向移动设置,可将西林瓶组外的塑膜的周侧和四角割开,且扣盖扣在西林瓶组上方,通过支架的移动拖动西林瓶组,使底膜