
一种膨胀装置抓取果蔬的无损采摘机械手.pdf

瀚玥****魔王


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种膨胀装置抓取果蔬的无损采摘机械手.pdf
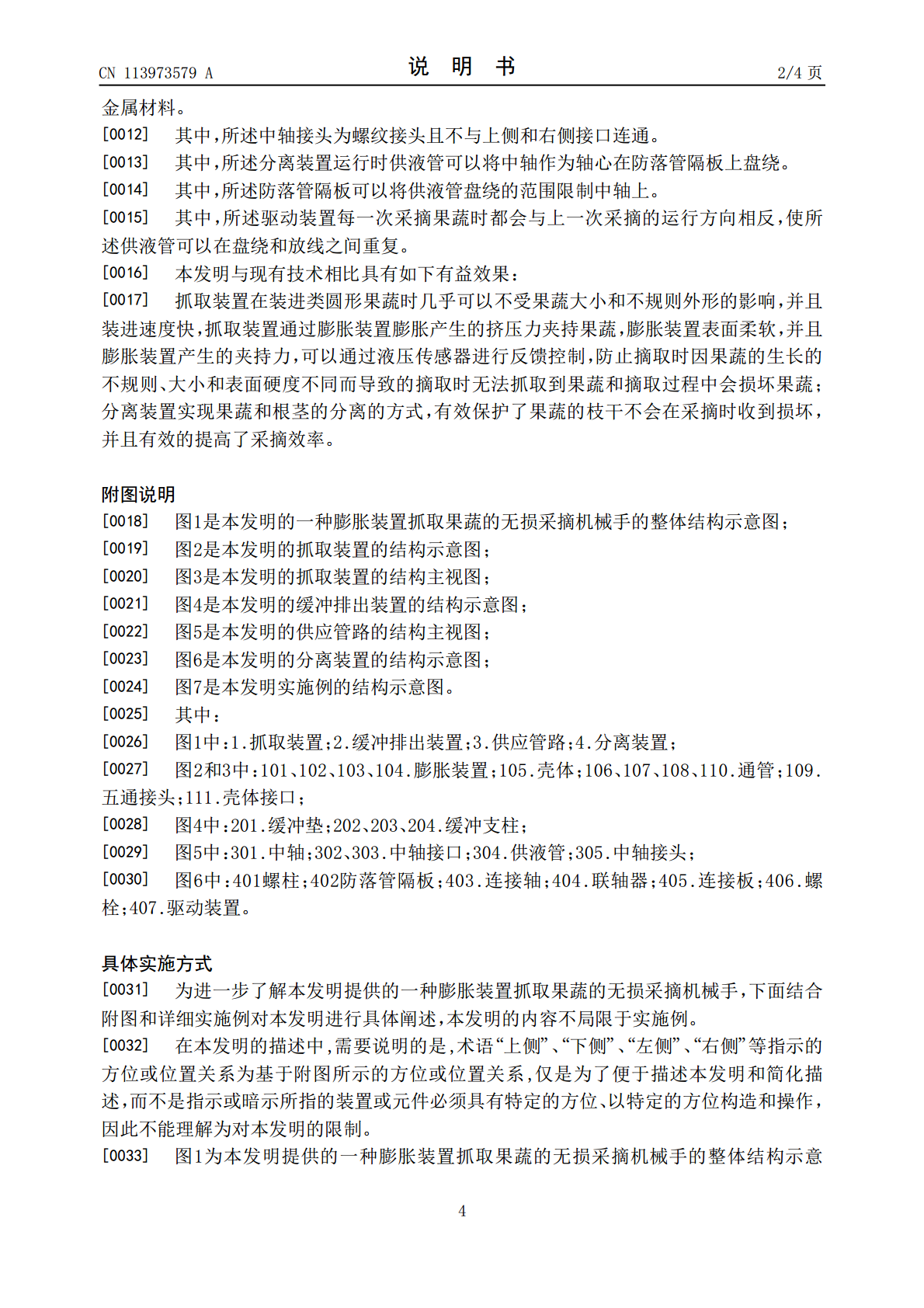
一种膨胀装置抓取果蔬的无损采摘机械手,其包括抓取装置、缓冲排出装置、供应管路和分离装置四部分组成,所述抓取装置包括膨胀装置、壳体、通管和五通接头,所述缓冲排出装置包括缓冲垫和缓冲支柱,所述供应管路包括中轴和供液管,所述分离装置包括防落管隔板、连接轴、联轴器、连接板和驱动装置。本发明在采摘果蔬时可以将果蔬装进抓取装置中,然后膨胀装置膨胀,将果蔬限制在抓取装置中,然后分离装置启动,将果蔬与根茎分离,分离结束后,膨胀装置收缩,果蔬落入缓冲垫上,之后由缓冲垫的一侧出口滚出,从而达到采摘果蔬的目的,代替人工采摘的同
一种果蔬采摘机械手装置.pdf
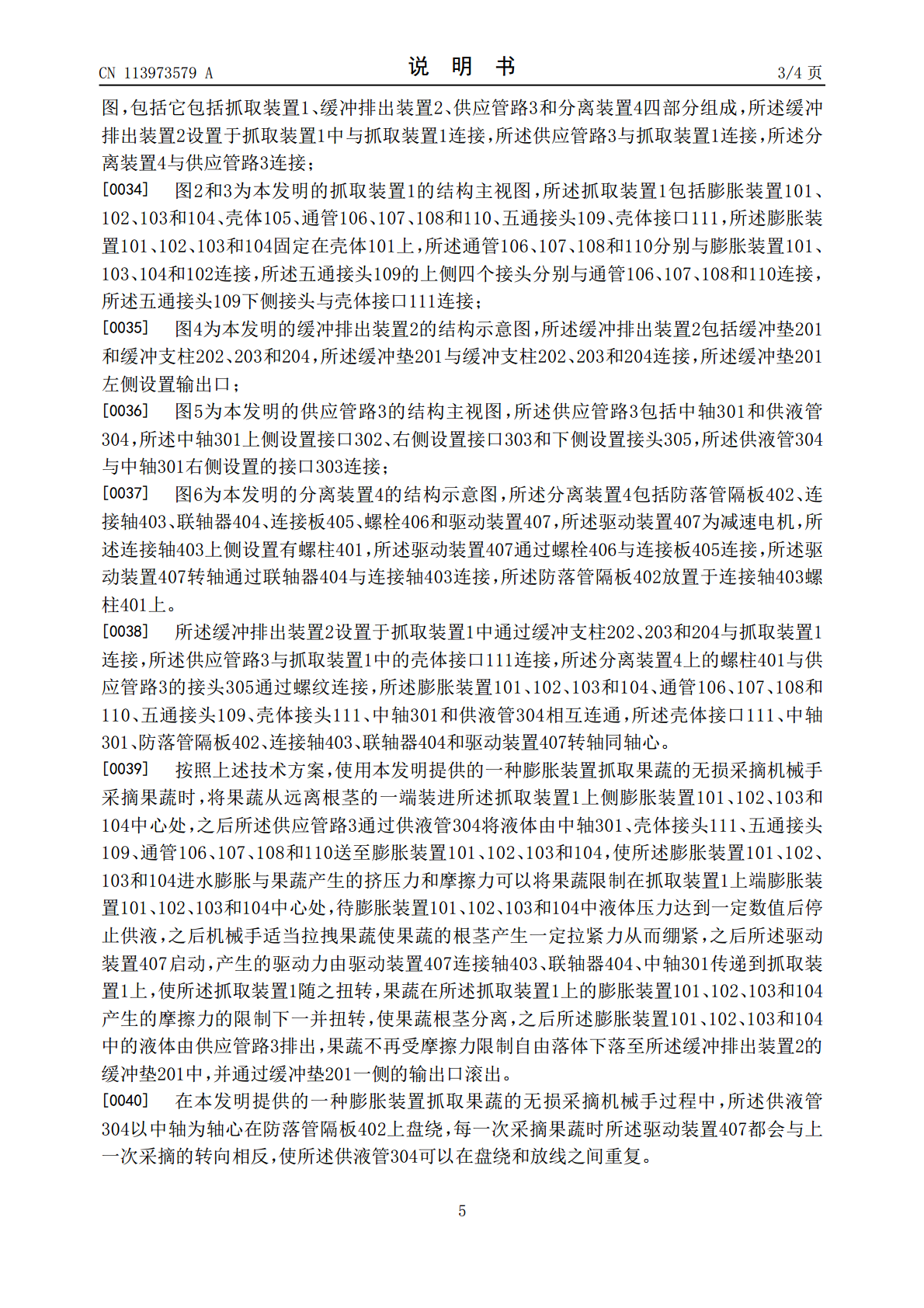
本发明公开了一种果蔬采摘机械手装置,农业机械技术领域,包括采摘机械手机构,所述采摘机械手机构包括夹持机构和旋转切割机构;所述夹持机构包括连接座、拉伸气缸、多个夹持爪和多个支撑杆;所述拉伸气缸固定在拉伸气缸支座上,所述拉伸气缸的活塞杆与所述连接座连接;所述夹持爪的一端铰接在所述连接座上;所述支撑杆的第一端铰接在所述拉伸气缸支座上,所述支撑杆的第二端铰接在所述夹持爪的中部;所述夹持爪的内侧面嵌设有压电薄膜传感器;所述旋转切割机构包括伺服摆动气缸和切割刀片;所述切割刀片安装在所述夹持抓的外侧面上,且所述切割刀片
一种果蔬采摘机械手.pdf
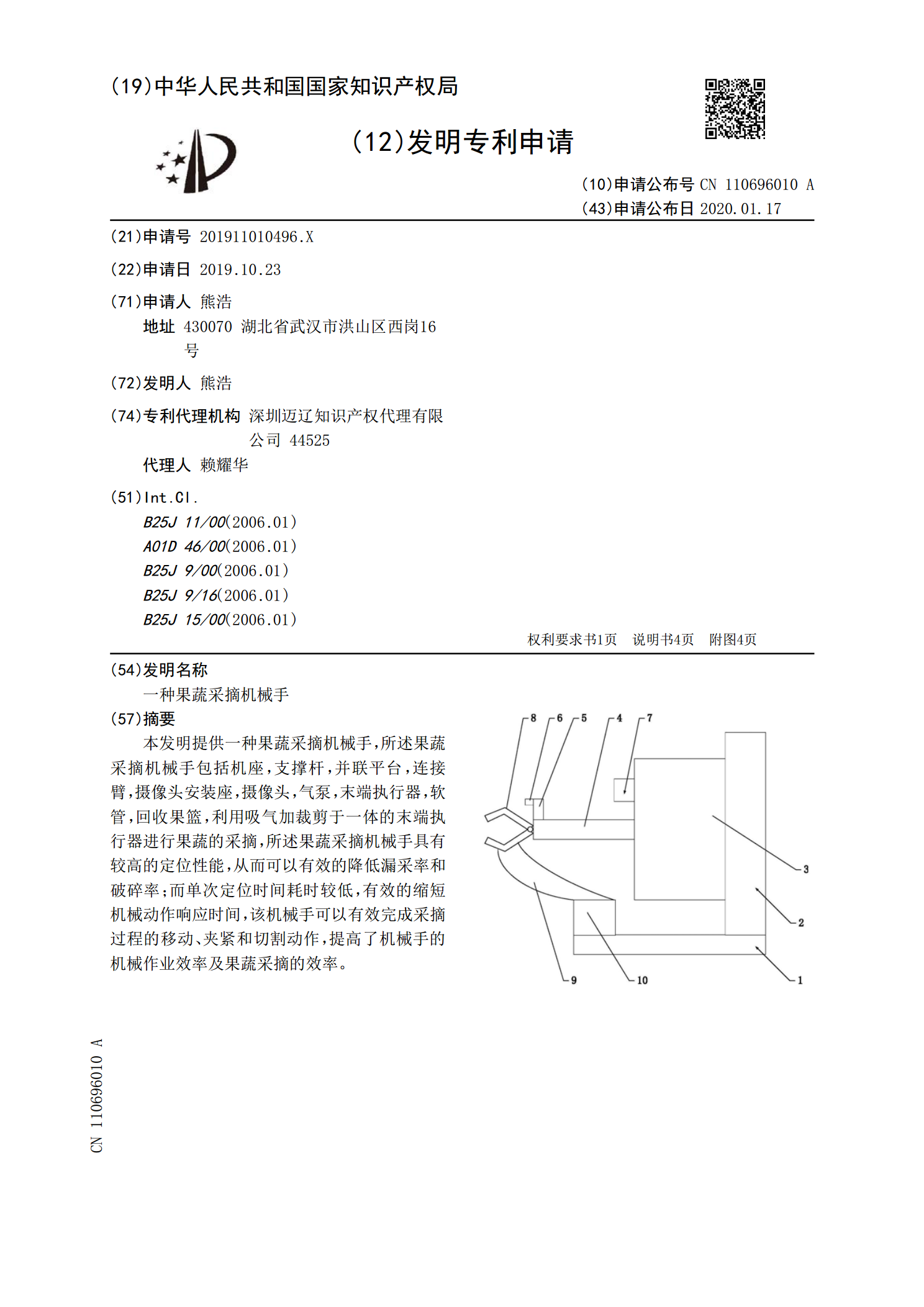
本发明提供一种果蔬采摘机械手,所述果蔬采摘机械手包括机座,支撑杆,并联平台,连接臂,摄像头安装座,摄像头,气泵,末端执行器,软管,回收果篮,利用吸气加裁剪于一体的末端执行器进行果蔬的采摘,所述果蔬采摘机械手具有较高的定位性能,从而可以有效的降低漏采率和破碎率;而单次定位时间耗时较低,有效的缩短机械动作响应时间,该机械手可以有效完成采摘过程的移动、夹紧和切割动作,提高了机械手的机械作业效率及果蔬采摘的效率。

一种果蔬采摘装置.pdf
一种果蔬采摘装置,包括采集部、切割部和伸缩机构,该采集部具有一个管道式的入口,采集部入口铰接两个以上的弹簧片。所述弹簧片通过弹簧与采摘装置相连接。当果蔬自采集部入口外放入采摘装置时,果蔬按压弹簧片使弹簧片转动,为果蔬进入采集部留出空间。当果蔬完全进入采集部,弹簧驱使弹簧片弹回。所述两个以上的弹簧片间留有一定的开放空间,用于避免果蔬的根茎被弹簧片夹住。切割部通过伸缩机构安装在采集部入口处。所述切割部与采集部入口形状相吻合。当伸缩机构伸缩时,切割部在伸缩机构的驱动下沿采集部入口平移切割。本发明能够实现对果蔬的

一种压力可控的扭转式自动果蔬采摘机械手.pdf
本发明公开了一种压力可控的扭转式自动果蔬采摘机械手,包括抓取单元、旋转驱动单元、扭矩控制单元以及自动识别单元。所述抓取单元包括上限位盘、导向圆盘、推进圆盘、下限位盘以及机械手;所述扭矩控制单元包括球形销、弹簧、弹簧支撑座以及旋转螺母;所述自动识别单元包括控制器、红外传感器、电机驱动模块以及电源模块。本发明通过齿轮传动以及红外传感器的判断,推动推进圆盘旋转,驱动机械爪压紧果蔬后,扭矩控制单元控制抓取单元扭转,分离果蔬,而后电机反转收回机械爪,果蔬落入下落管道。该机械手可通过预设压力控制抓紧力,结构紧凑,简化