
一种轮式移动机器人点镇定滚动优化控制方法.pdf

Wi****m7


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮式移动机器人点镇定滚动优化控制方法.pdf
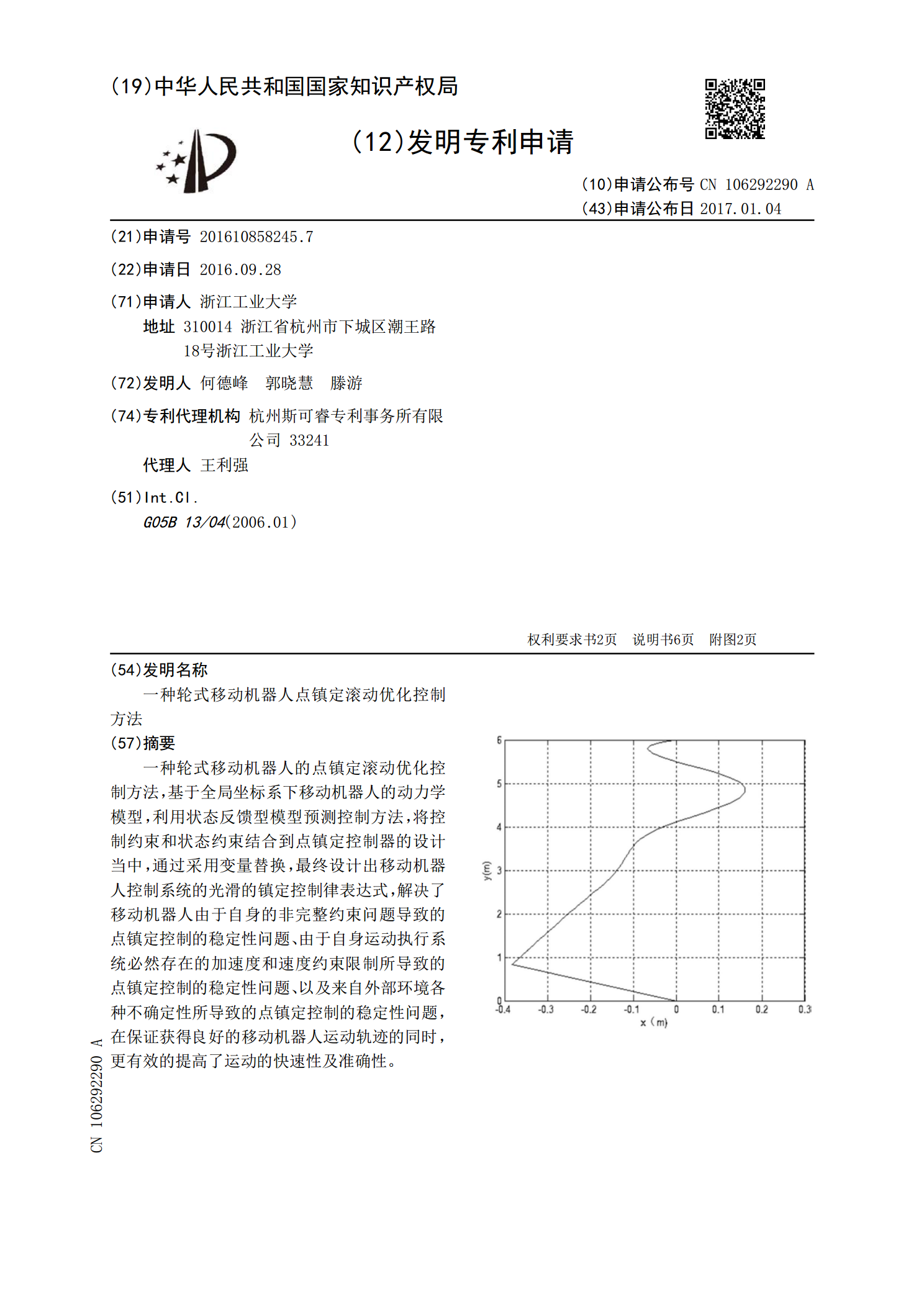
一种轮式移动机器人的点镇定滚动优化控制方法,基于全局坐标系下移动机器人的动力学模型,利用状态反馈型模型预测控制方法,将控制约束和状态约束结合到点镇定控制器的设计当中,通过采用变量替换,最终设计出移动机器人控制系统的光滑的镇定控制律表达式,解决了移动机器人由于自身的非完整约束问题导致的点镇定控制的稳定性问题、由于自身运动执行系统必然存在的加速度和速度约束限制所导致的点镇定控制的稳定性问题、以及来自外部环境各种不确定性所导致的点镇定控制的稳定性问题,在保证获得良好的移动机器人运动轨迹的同时,更有效的提高了运动
一种基于点镇定的轮式移动机器人目标跟踪控制方法.pdf
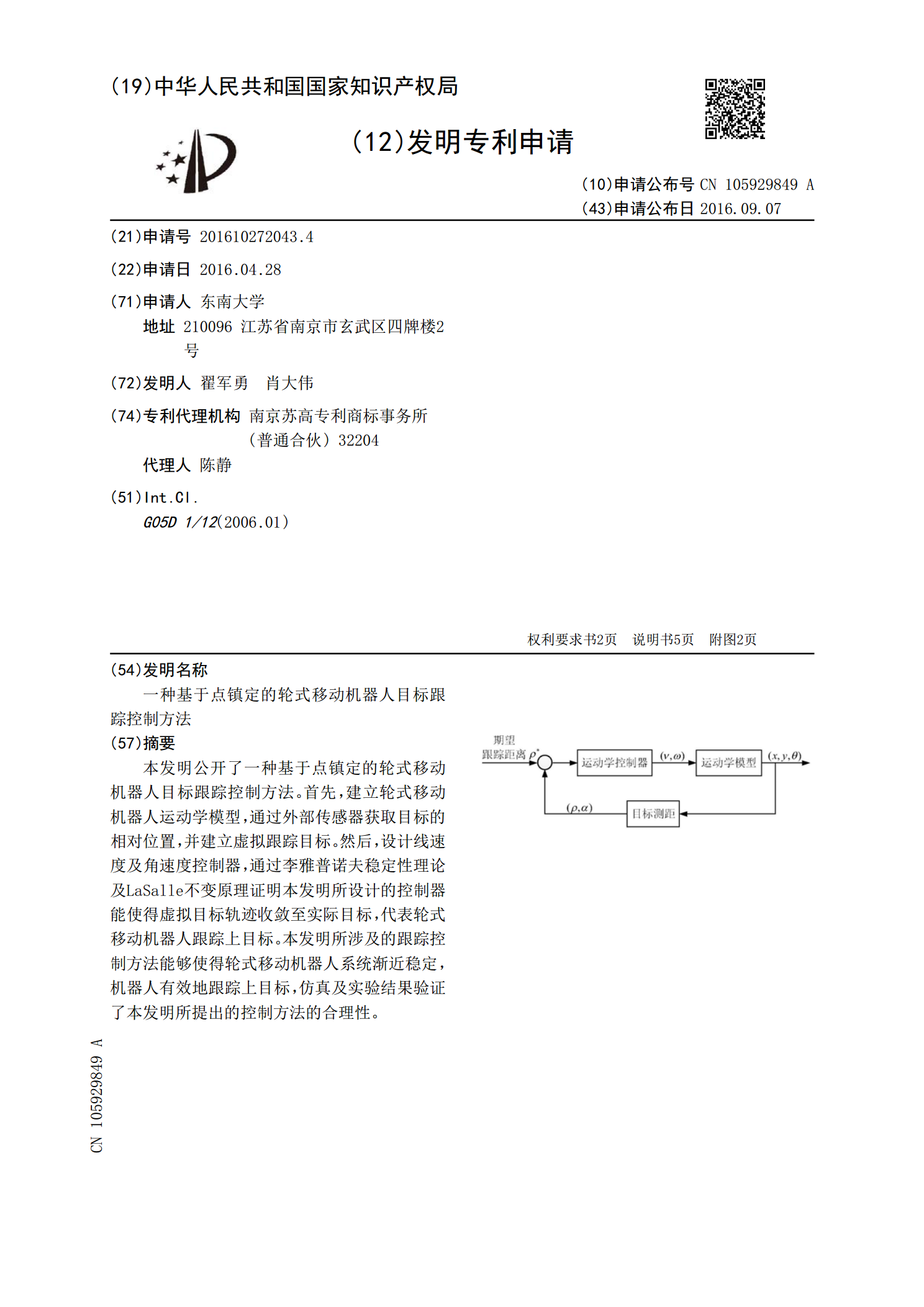
本发明公开了一种基于点镇定的轮式移动机器人目标跟踪控制方法。首先,建立轮式移动机器人运动学模型,通过外部传感器获取目标的相对位置,并建立虚拟跟踪目标。然后,设计线速度及角速度控制器,通过李雅普诺夫稳定性理论及LaSalle不变原理证明本发明所设计的控制器能使得虚拟目标轨迹收敛至实际目标,代表轮式移动机器人跟踪上目标。本发明所涉及的跟踪控制方法能够使得轮式移动机器人系统渐近稳定,机器人有效地跟踪上目标,仿真及实验结果验证了本发明所提出的控制方法的合理性。
动态场景中轮式移动机器人的视觉镇定控制.pdf
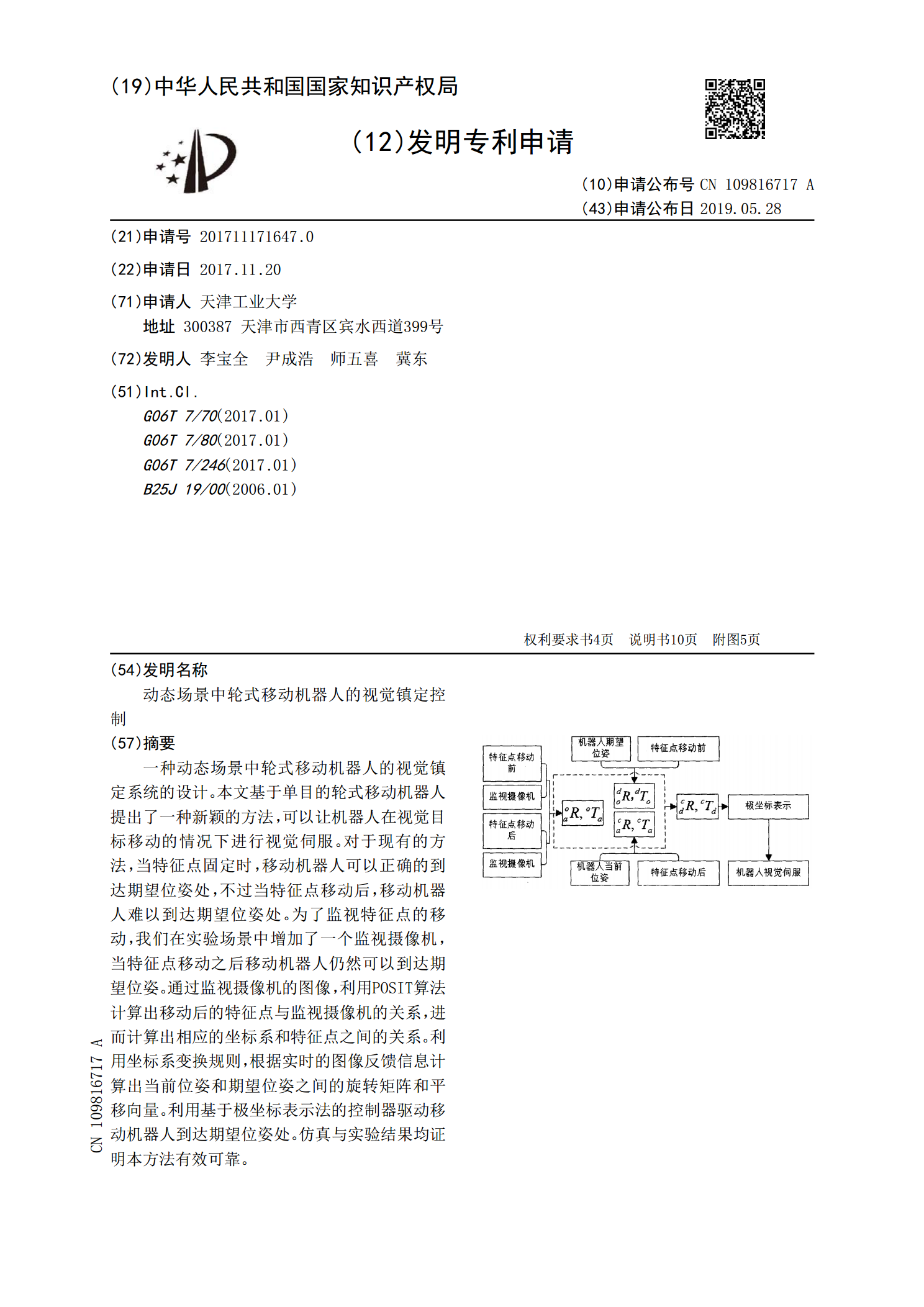
一种动态场景中轮式移动机器人的视觉镇定系统的设计。本文基于单目的轮式移动机器人提出了一种新颖的方法,可以让机器人在视觉目标移动的情况下进行视觉伺服。对于现有的方法,当特征点固定时,移动机器人可以正确的到达期望位姿处,不过当特征点移动后,移动机器人难以到达期望位姿处。为了监视特征点的移动,我们在实验场景中增加了一个监视摄像机,当特征点移动之后移动机器人仍然可以到达期望位姿。通过监视摄像机的图像,利用POSIT算法计算出移动后的特征点与监视摄像机的关系,进而计算出相应的坐标系和特征点之间的关系。利用坐标系变换

两轮轮式机器人点镇定增量式智能控制方法.pdf
本发明提供了一种两轮轮式机器人点镇定增量式智能控制方法,该方法提出了一种包含任务适应级和运行控制级的增量式控制器,该增量式控制器在现有技术的基础上,将现有技术中作为比例控制器输出的期望轮速作为本发明增量式控制器中任务适应级输出的期望轮速适应值,解决了机器人的非完整约束问题导致的点镇定控制的稳定性问题;并增加了运行控制级对期望轮速适应值进行进一步的增量式轮速跟随控制,解决了因运动执行系统必然存在的加速度和速度约束限制所导致的点镇定控制的稳定性问题,在保证获得优良的机器人运动轨迹的同时,更有效提高机器人运动的
一种轮式移动机器人控制方法.pdf
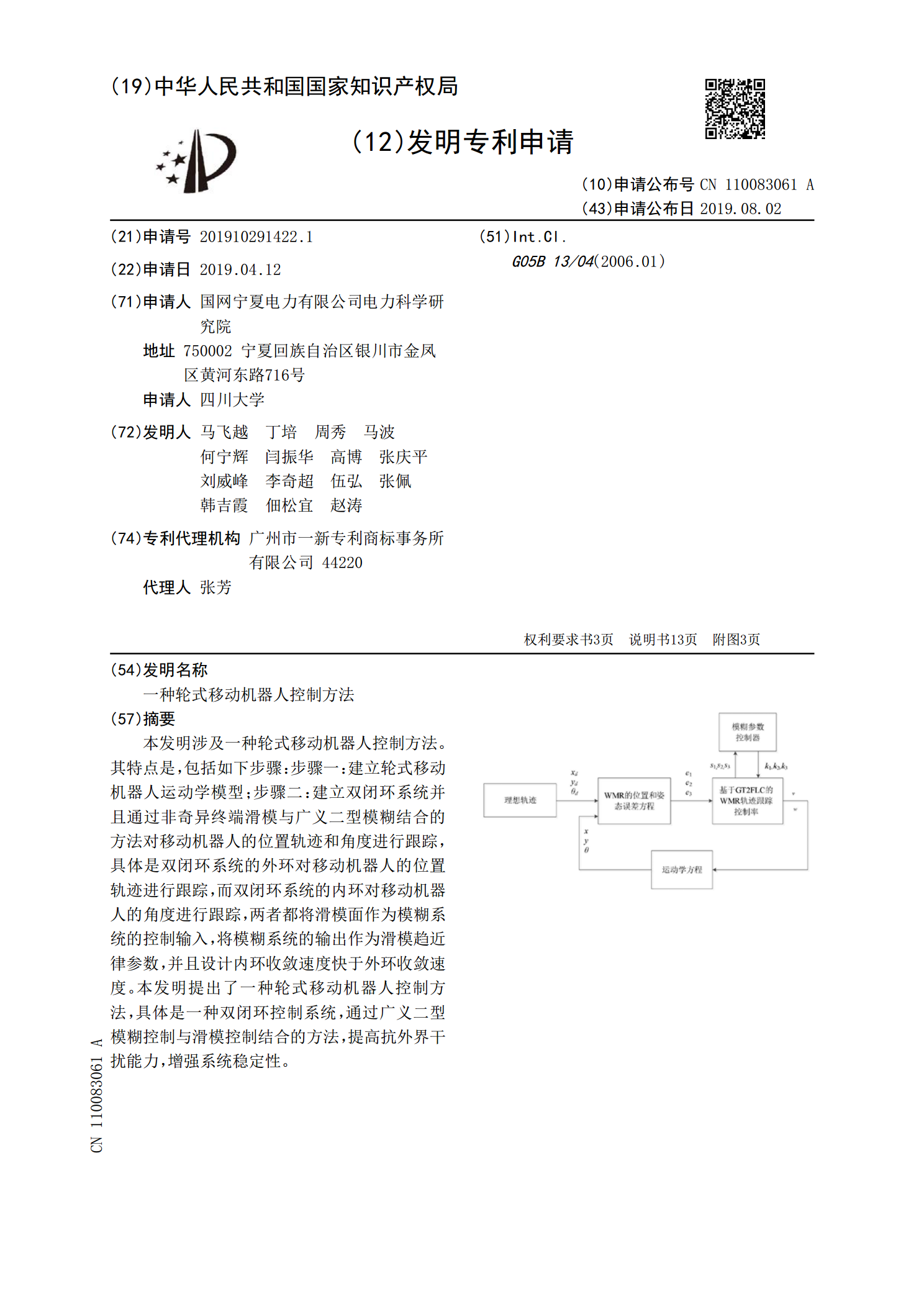
本发明涉及一种轮式移动机器人控制方法。其特点是,包括如下步骤:步骤一:建立轮式移动机器人运动学模型;步骤二:建立双闭环系统并且通过非奇异终端滑模与广义二型模糊结合的方法对移动机器人的位置轨迹和角度进行跟踪,具体是双闭环系统的外环对移动机器人的位置轨迹进行跟踪,而双闭环系统的内环对移动机器人的角度进行跟踪,两者都将滑模面作为模糊系统的控制输入,将模糊系统的输出作为滑模趋近律参数,并且设计内环收敛速度快于外环收敛速度。本发明提出了一种轮式移动机器人控制方法,具体是一种双闭环控制系统,通过广义二型模糊控制与滑模