
动态场景中轮式移动机器人的视觉镇定控制.pdf

葫芦****io

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
动态场景中轮式移动机器人的视觉镇定控制.pdf
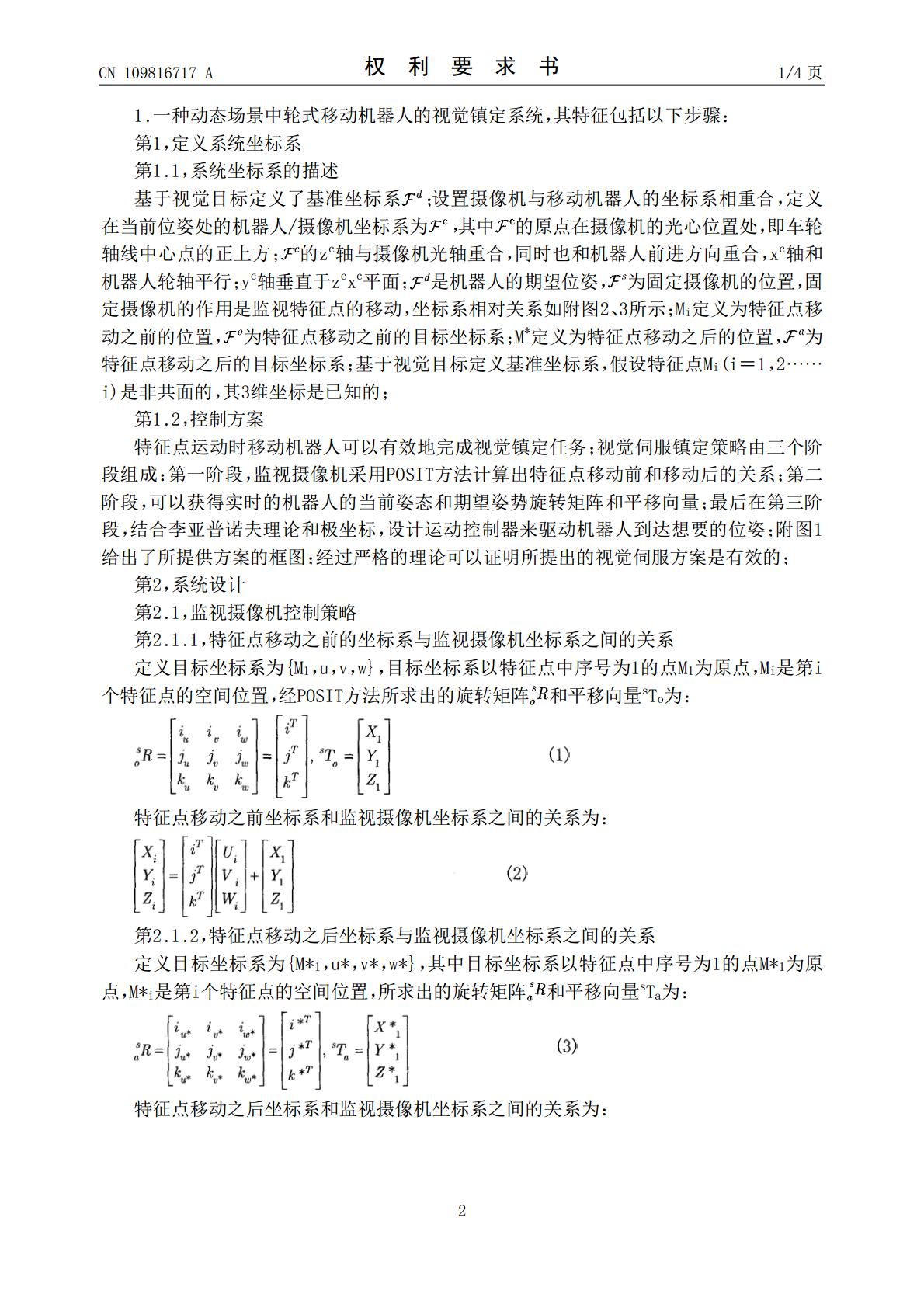
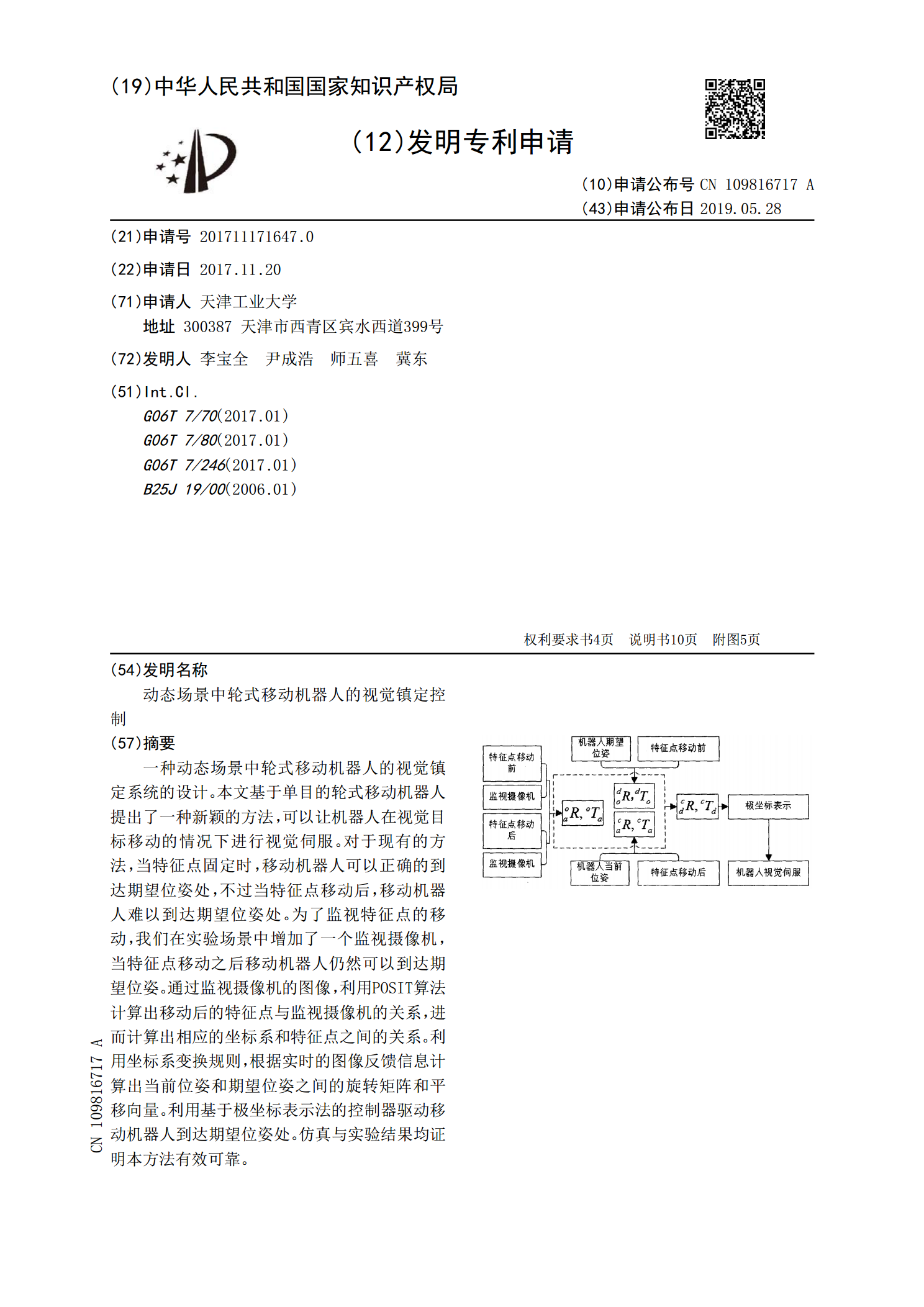
一种动态场景中轮式移动机器人的视觉镇定系统的设计。本文基于单目的轮式移动机器人提出了一种新颖的方法,可以让机器人在视觉目标移动的情况下进行视觉伺服。对于现有的方法,当特征点固定时,移动机器人可以正确的到达期望位姿处,不过当特征点移动后,移动机器人难以到达期望位姿处。为了监视特征点的移动,我们在实验场景中增加了一个监视摄像机,当特征点移动之后移动机器人仍然可以到达期望位姿。通过监视摄像机的图像,利用POSIT算法计算出移动后的特征点与监视摄像机的关系,进而计算出相应的坐标系和特征点之间的关系。利用坐标系变换

动态场景下的轮式移动机器人视觉伺服镇定.docx
动态场景下的轮式移动机器人视觉伺服镇定标题:基于视觉伺服的动态场景下轮式移动机器人的镇定摘要:随着科技的发展,轮式移动机器人在各个领域得到了广泛的应用。在动态场景中,轮式移动机器人必须能够实现稳定的移动和镇定,以确保任务的高效执行和安全性。本论文主要探讨了基于视觉伺服的方法来解决动态场景下轮式移动机器人的镇定问题,并提出了一种相应的算法,并通过模拟实验进行验证。第一节:引言介绍轮式移动机器人的应用背景和特点,以及动态场景对其镇定的要求。简要介绍视觉伺服的概念和应用领域,并提出本论文的目标。第二节:相关工作

动态场景下的轮式移动机器人视觉伺服镇定的开题报告.docx
动态场景下的轮式移动机器人视觉伺服镇定的开题报告一、研究背景随着机器人技术的不断发展,轮式移动机器人已经被广泛用于各种场景下的物流和仓储管理,农业作业,矿山勘探等移动自主机器人领域。由于噪声、光线、环境变化和其他干扰等不可控因素的存在,移动机器人任务执行过程中往往伴随着诸多的不确定性,这也给机器人视觉伺服控制带来了较大的挑战。因此,构建一个稳定、鲁棒的视觉伺服控制算法已经成为了轮式移动机器人技术研究领域的热点问题之一。二、研究目的本文旨在针对动态场景下的移动机器人,提出一种基于视觉伺服控制的实时运动目标跟
模型未知动态场景下移动机器人视觉镇定.pdf
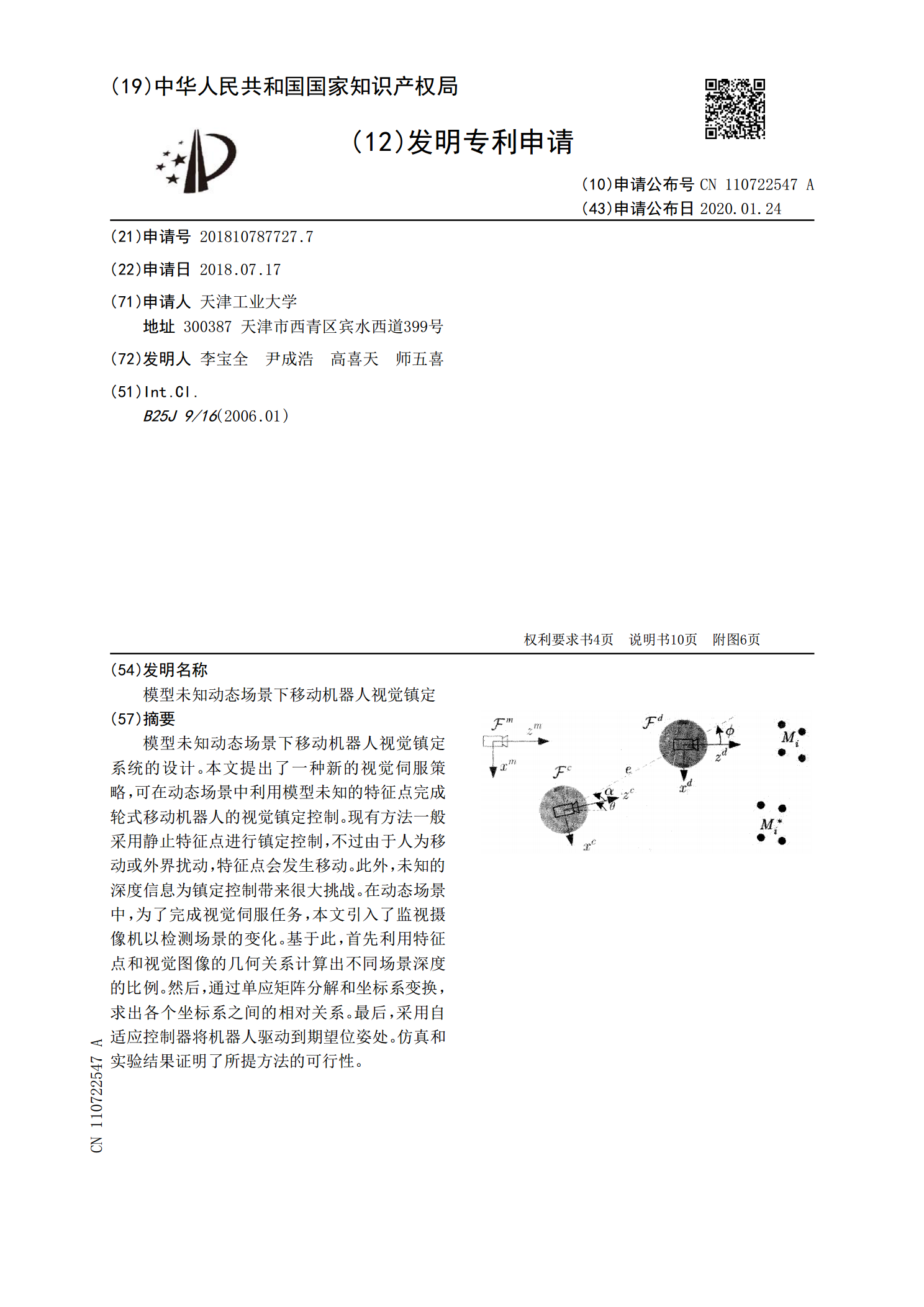
模型未知动态场景下移动机器人视觉镇定系统的设计。本文提出了一种新的视觉伺服策略,可在动态场景中利用模型未知的特征点完成轮式移动机器人的视觉镇定控制。现有方法一般采用静止特征点进行镇定控制,不过由于人为移动或外界扰动,特征点会发生移动。此外,未知的深度信息为镇定控制带来很大挑战。在动态场景中,为了完成视觉伺服任务,本文引入了监视摄像机以检测场景的变化。基于此,首先利用特征点和视觉图像的几何关系计算出不同场景深度的比例。然后,通过单应矩阵分解和坐标系变换,求出各个坐标系之间的相对关系。最后,采用自适应控制器将
一种轮式移动机器人点镇定滚动优化控制方法.pdf
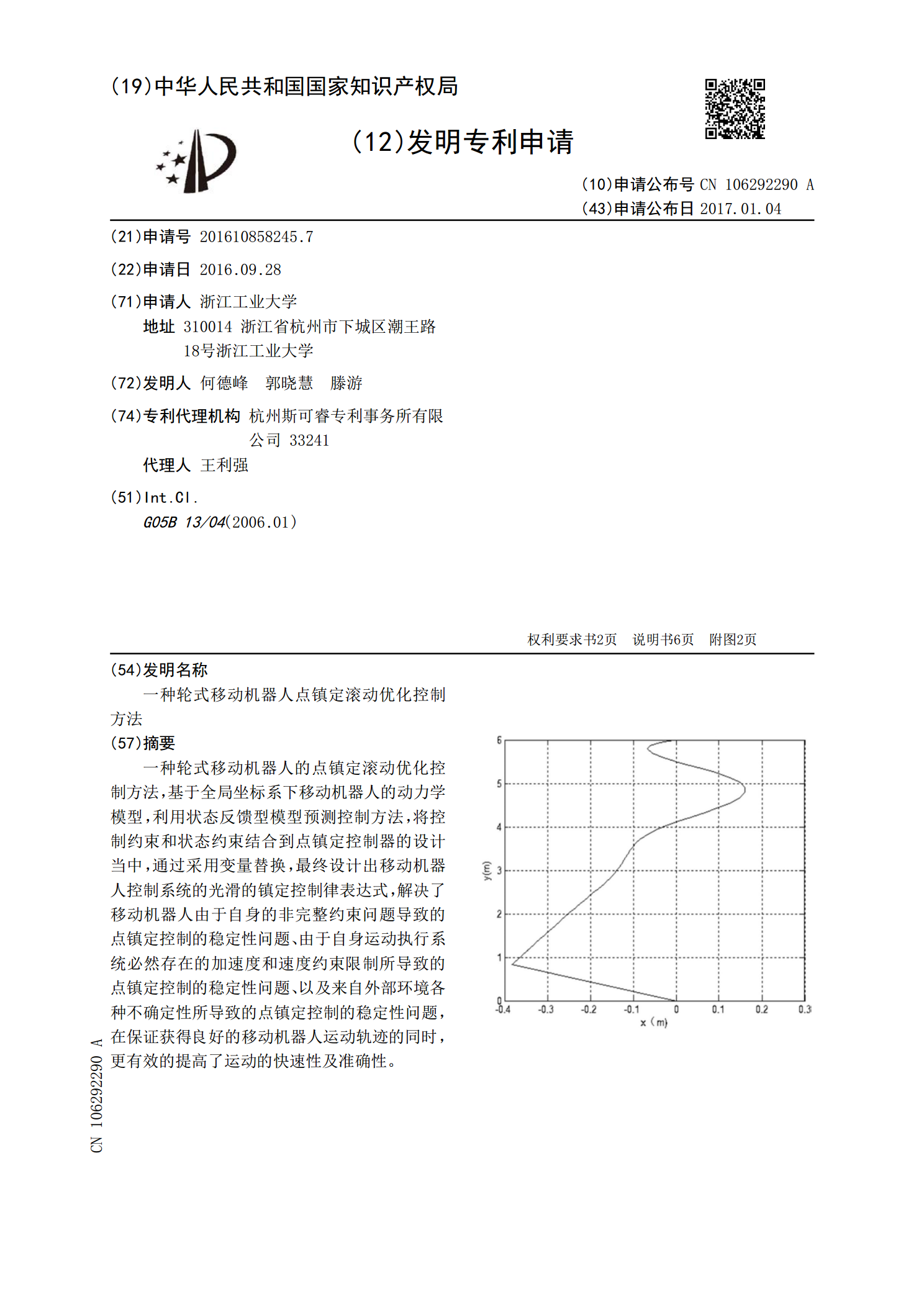
一种轮式移动机器人的点镇定滚动优化控制方法,基于全局坐标系下移动机器人的动力学模型,利用状态反馈型模型预测控制方法,将控制约束和状态约束结合到点镇定控制器的设计当中,通过采用变量替换,最终设计出移动机器人控制系统的光滑的镇定控制律表达式,解决了移动机器人由于自身的非完整约束问题导致的点镇定控制的稳定性问题、由于自身运动执行系统必然存在的加速度和速度约束限制所导致的点镇定控制的稳定性问题、以及来自外部环境各种不确定性所导致的点镇定控制的稳定性问题,在保证获得良好的移动机器人运动轨迹的同时,更有效的提高了运动