
一种轮式移动机器人控制方法.pdf

一条****轩吗

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮式移动机器人控制方法.pdf
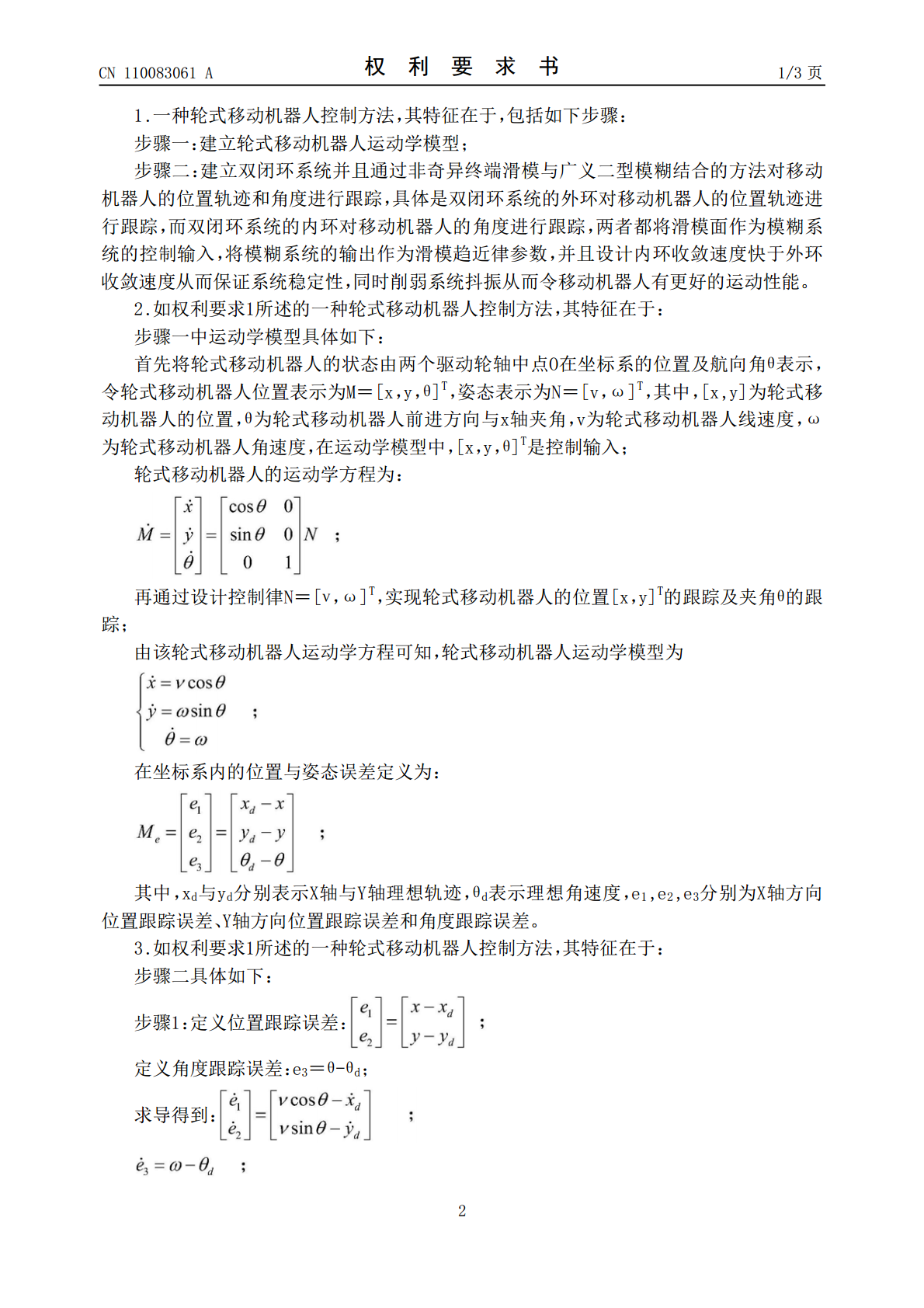
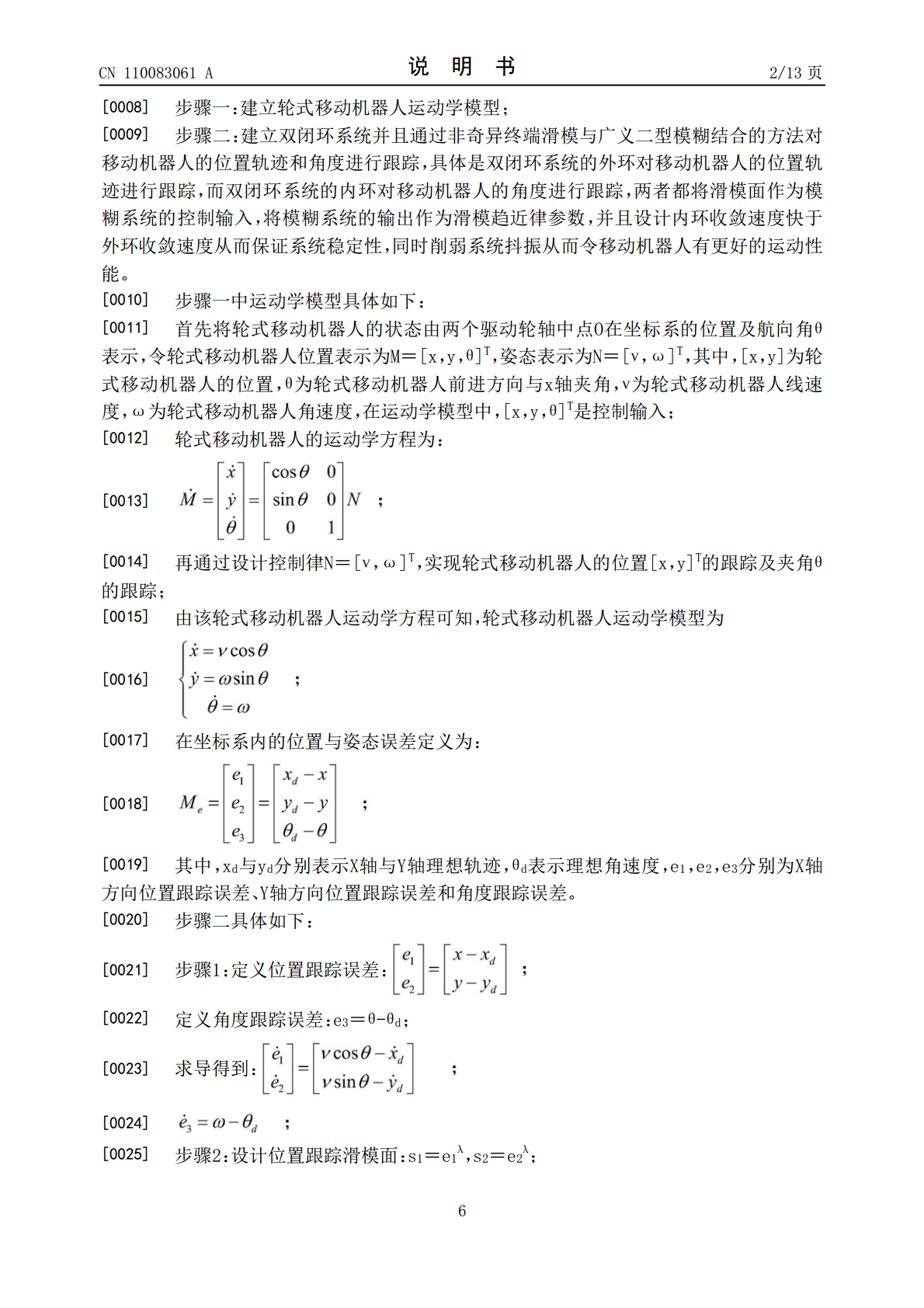
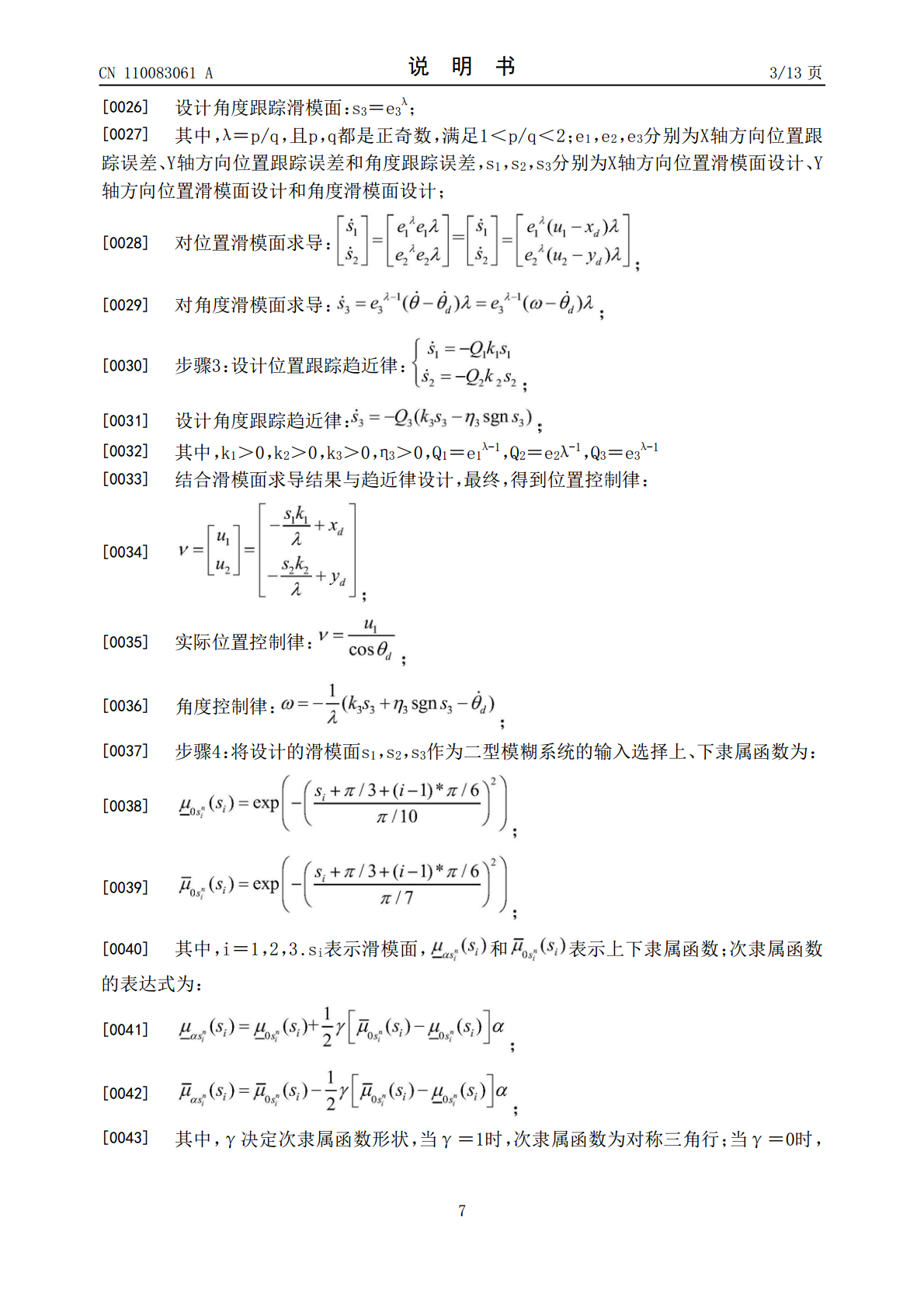
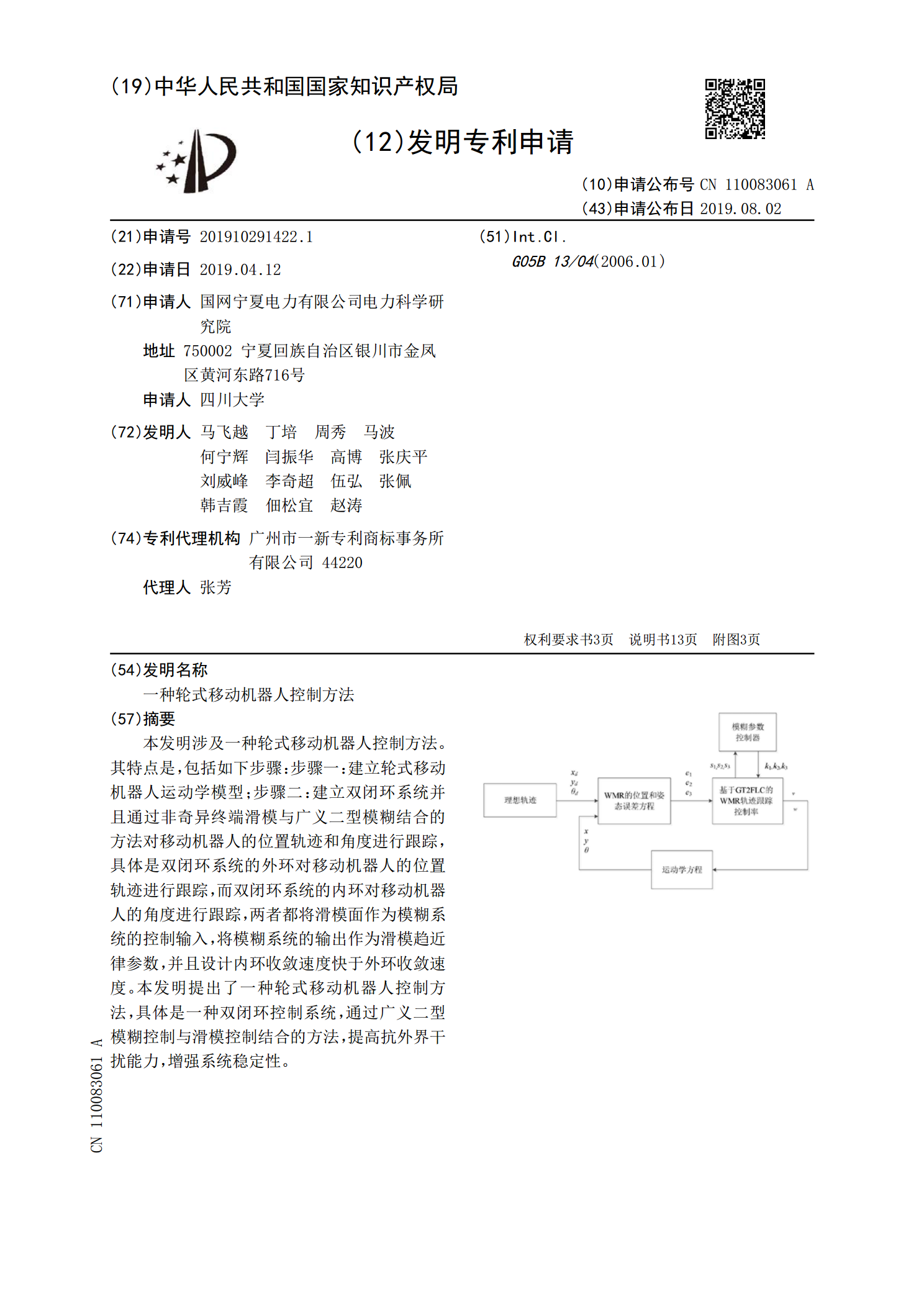
本发明涉及一种轮式移动机器人控制方法。其特点是,包括如下步骤:步骤一:建立轮式移动机器人运动学模型;步骤二:建立双闭环系统并且通过非奇异终端滑模与广义二型模糊结合的方法对移动机器人的位置轨迹和角度进行跟踪,具体是双闭环系统的外环对移动机器人的位置轨迹进行跟踪,而双闭环系统的内环对移动机器人的角度进行跟踪,两者都将滑模面作为模糊系统的控制输入,将模糊系统的输出作为滑模趋近律参数,并且设计内环收敛速度快于外环收敛速度。本发明提出了一种轮式移动机器人控制方法,具体是一种双闭环控制系统,通过广义二型模糊控制与滑模
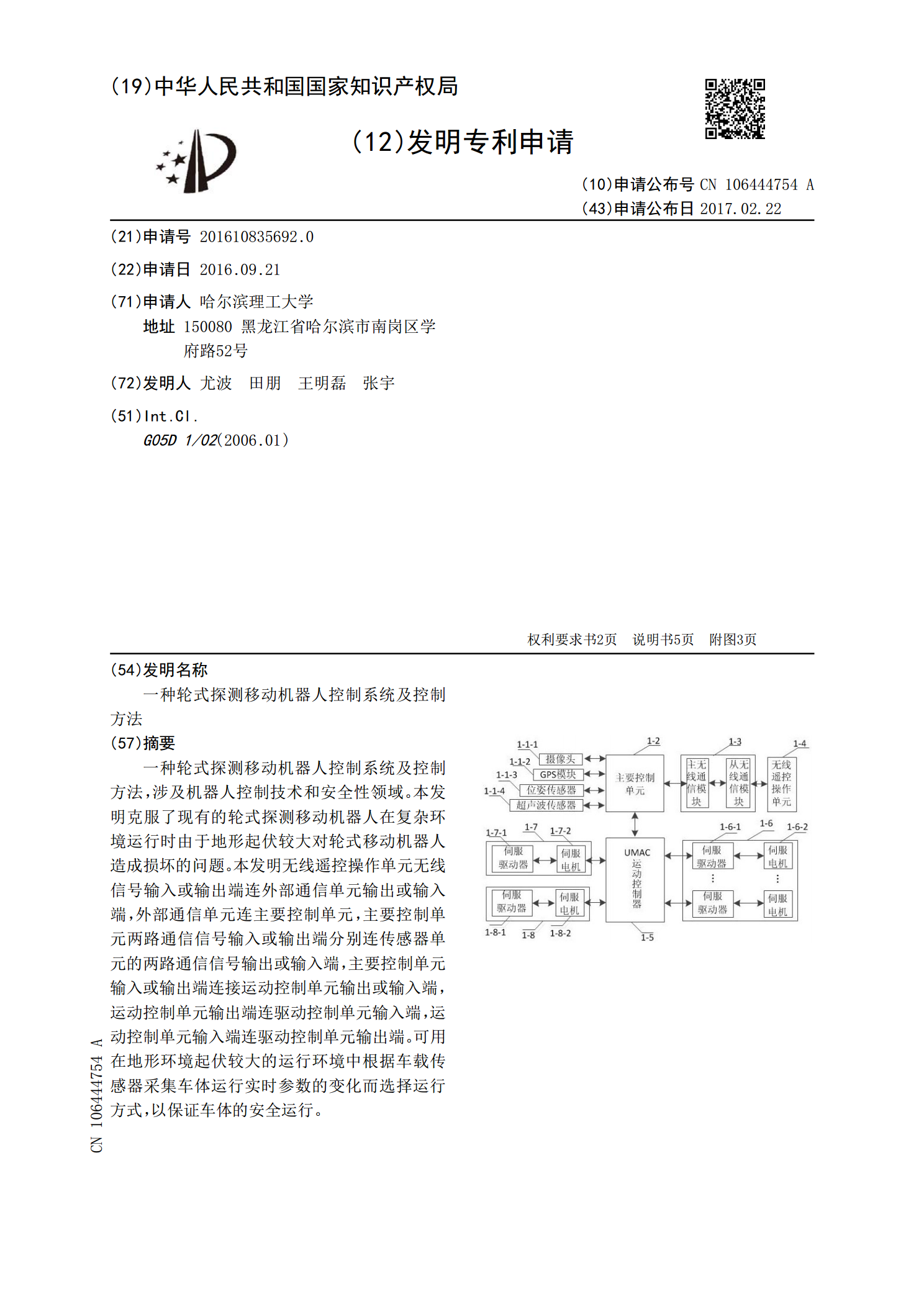
一种轮式探测移动机器人控制系统及控制方法.pdf
一种轮式探测移动机器人控制系统及控制方法,涉及机器人控制技术和安全性领域。本发明克服了现有的轮式探测移动机器人在复杂环境运行时由于地形起伏较大对轮式移动机器人造成损坏的问题。本发明无线遥控操作单元无线信号输入或输出端连外部通信单元输出或输入端,外部通信单元连主要控制单元,主要控制单元两路通信信号输入或输出端分别连传感器单元的两路通信信号输出或输入端,主要控制单元输入或输出端连接运动控制单元输出或输入端,运动控制单元输出端连驱动控制单元输入端,运动控制单元输入端连驱动控制单元输出端。可用在地形环境起伏较大的

轮式移动机器人轨迹跟踪控制方法.docx
轮式移动机器人轨迹跟踪控制方法轮式移动机器人轨迹跟踪控制方法摘要:轮式移动机器人是一种灵活、高效的移动机器人,在许多应用领域具有重要价值。轨迹跟踪控制是轮式移动机器人的核心技术之一,它在机器人自主导航和路径规划中起着重要作用。本论文主要介绍轮式移动机器人轨迹跟踪控制的相关方法和技术,包括基于模型的控制方法、模糊控制方法和神经网络控制方法。同时,本文还将对这些方法进行比较和评估,为轮式移动机器人的轨迹跟踪控制提供参考和指导。关键词:轮式移动机器人、轨迹跟踪控制、基于模型的控制、模糊控制、神经网络控制1.引言

轮式移动机器人的变结构控制方法.pdf
本发明公开了一种轮式移动机器人的变结构控制方法,采用多模态PID控制方法来控制机器人的直线移动;采用PID控制与规则控制相结合的控制方法来校正小车的前进方向;这两种控制方式通过方向角和中心偏移量的变化进行转换,机器人的转弯控制通过转弯方向信息与位置信息来控制机器人以原地直角转弯方式进行转弯,本发明采用多模态PID控制和规则控制与PID控制相结合,该算法针对机器人所处的不同状态采用不同的控制算法以及相应的控制参数,有效地提高和改善了机器运动控制性能,按照误差的变化情况来划分控制模态,更合理地模拟了人的控制行
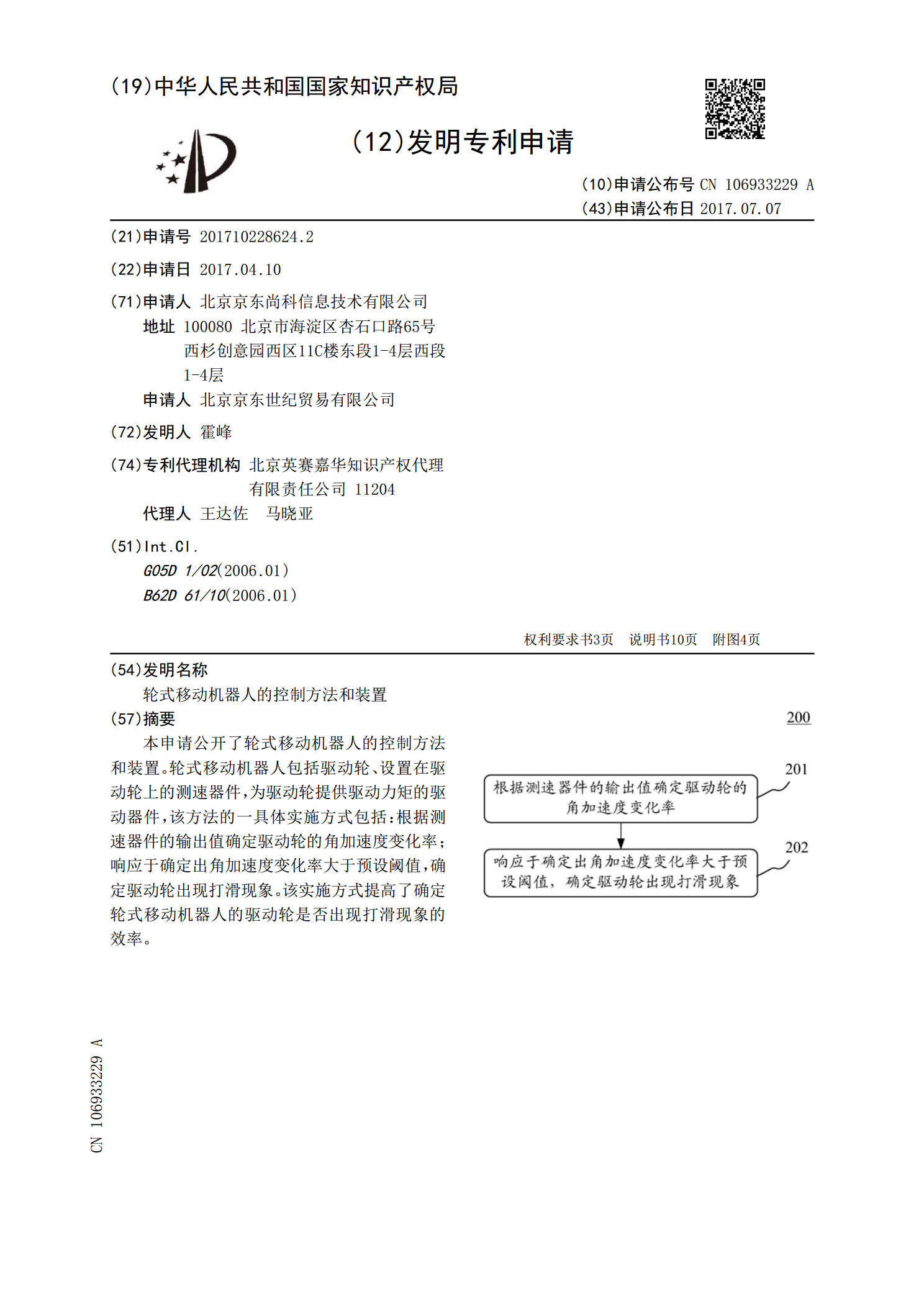
轮式移动机器人的控制方法和装置.pdf
本申请公开了轮式移动机器人的控制方法和装置。轮式移动机器人包括驱动轮、设置在驱动轮上的测速器件,为驱动轮提供驱动力矩的驱动器件,该方法的一具体实施方式包括:根据测速器件的输出值确定驱动轮的角加速度变化率;响应于确定出角加速度变化率大于预设阈值,确定驱动轮出现打滑现象。该实施方式提高了确定轮式移动机器人的驱动轮是否出现打滑现象的效率。