
一种卫星绕空间轴的最短路径姿态机动控制方法.pdf

一吃****瀚文


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种卫星绕空间轴的最短路径姿态机动控制方法.pdf
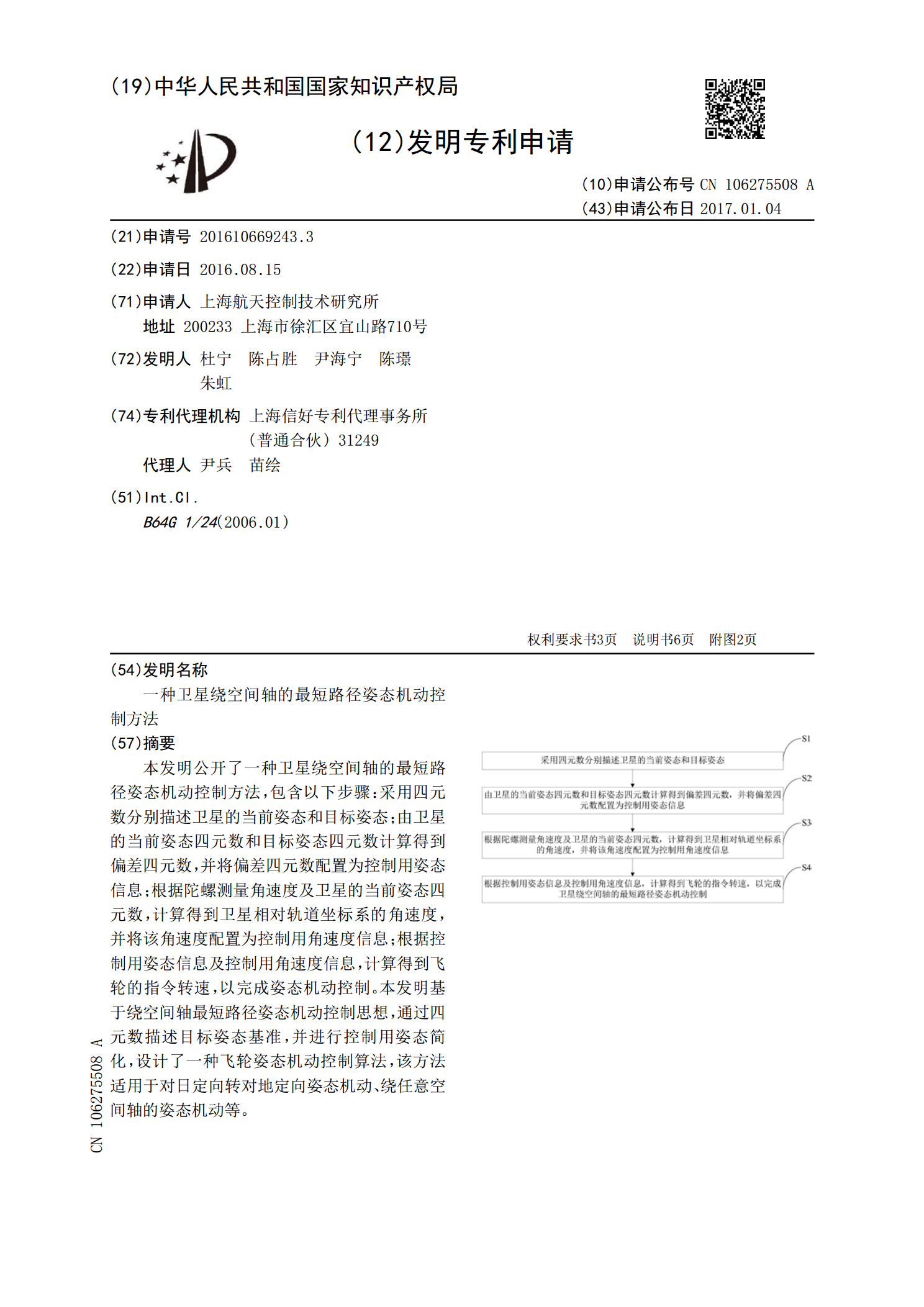
本发明公开了一种卫星绕空间轴的最短路径姿态机动控制方法,包含以下步骤:采用四元数分别描述卫星的当前姿态和目标姿态;由卫星的当前姿态四元数和目标姿态四元数计算得到偏差四元数,并将偏差四元数配置为控制用姿态信息;根据陀螺测量角速度及卫星的当前姿态四元数,计算得到卫星相对轨道坐标系的角速度,并将该角速度配置为控制用角速度信息;根据控制用姿态信息及控制用角速度信息,计算得到飞轮的指令转速,以完成姿态机动控制。本发明基于绕空间轴最短路径姿态机动控制思想,通过四元数描述目标姿态基准,并进行控制用姿态简化,设计了一种飞
一种基于最短空间轴的姿态机动控制和导引律规划方法.pdf
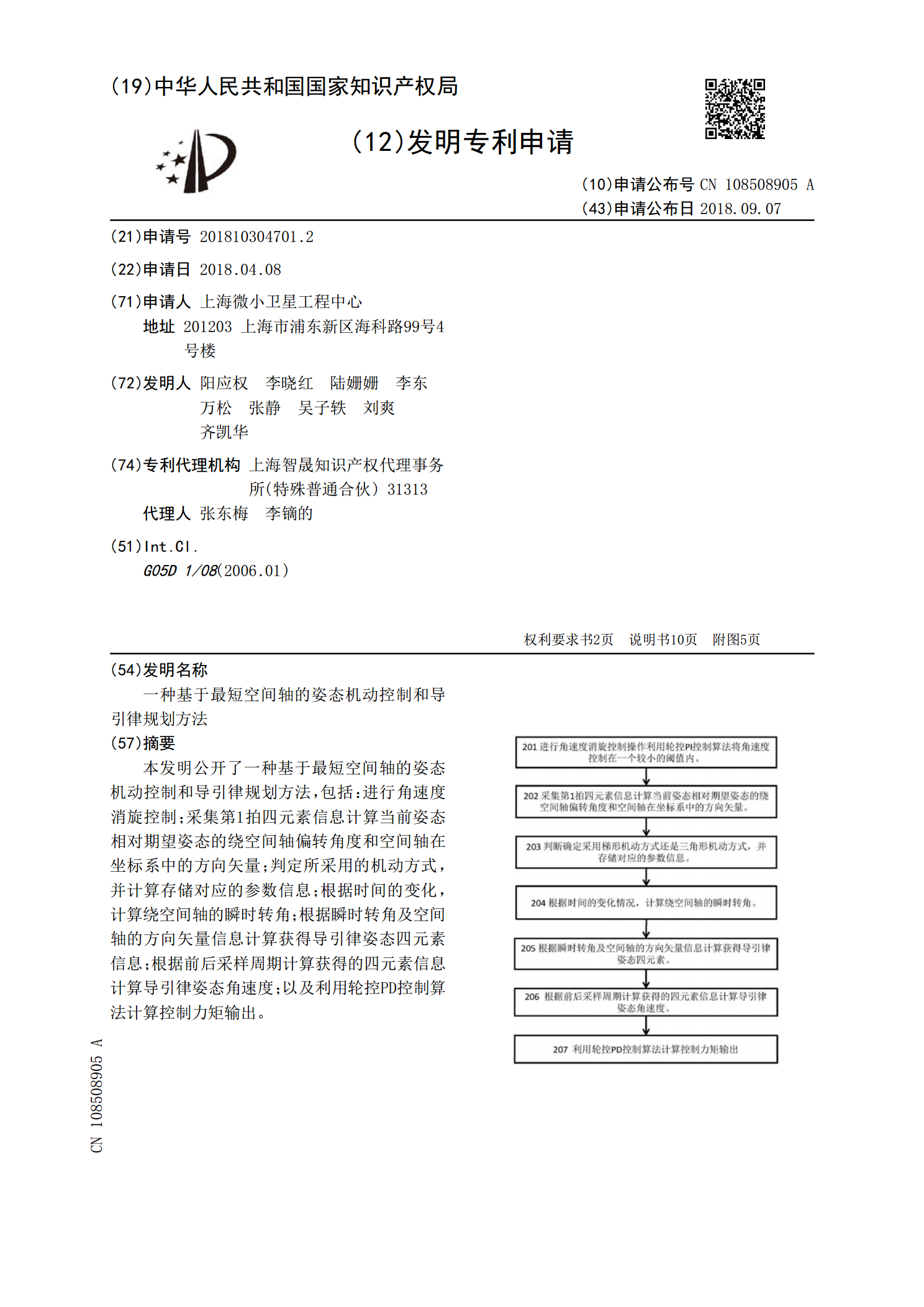
本发明公开了一种基于最短空间轴的姿态机动控制和导引律规划方法,包括:进行角速度消旋控制;采集第1拍四元素信息计算当前姿态相对期望姿态的绕空间轴偏转角度和空间轴在坐标系中的方向矢量;判定所采用的机动方式,并计算存储对应的参数信息;根据时间的变化,计算绕空间轴的瞬时转角;根据瞬时转角及空间轴的方向矢量信息计算获得导引律姿态四元素信息;根据前后采样周期计算获得的四元素信息计算导引律姿态角速度;以及利用轮控PD控制算法计算控制力矩输出。

基于飞轮的卫星绕瞬时欧拉轴逐次逼近姿态机动控制装置及其控制方法.pdf
基于飞轮的卫星绕瞬时欧拉轴逐次逼近姿态机动控制装置及其控制方法,它涉及卫星姿态调整的控制装置及其控制方法。它为解决采用喷气控制实现卫星大角度姿态机动存在的燃料消耗大,卫星的使用寿命短,且喷气的控制系统配置复杂,卫星的体积和重量都难以减小的问题而提出。先根据所述控制装置的系统要求,设定控制装置的参数,根据运动方程得出姿态偏差角速度;姿态误差四元数表达卫星当前姿态与目标姿态的瞬时欧拉轴和偏差角的关系得到控制信号再计算得出卫星控制器计算的飞轮控制输入力矩向量并作为反作用飞轮产生力矩所依据控制数据指令。它不消耗其

基于路径规划的敏捷卫星姿态机动反馈控制方法.docx
基于路径规划的敏捷卫星姿态机动反馈控制方法摘要卫星姿态机动控制是实现卫星在轨姿态控制的重要手段,针对卫星姿态控制中路径规划和反馈控制的相关问题,本文提出了基于路径规划的敏捷卫星姿态机动反馈控制方法。首先介绍了卫星姿态机动控制的背景和意义,然后分析了卫星姿态机动控制中存在的路径规划和反馈控制问题,并提出了基于路径规划的敏捷姿态机动控制方法以及反馈控制方法。最后,通过数值实验验证了本文提出的方法的可行性和有效性。关键词:卫星姿态机动、路径规划、反馈控制、敏捷姿态控制、数值实验一、引言随着卫星技术的快速发展,遥

单轴轮控快速姿态机动卫星的变结构控制模型的建模方法.pdf
单轴轮控快速姿态机动卫星的变结构控制模型的建模方法,它涉及卫星姿态控制技术领域。该方法解决现有传统变结构控制器不适用于快速机动卫星,以及传统变结构控制器设计方法不具通用性的问题。所述方法包括以下步骤:所述方法包括以下步骤:求解a、T、Δ、ε、K、ΔI为需要设计的参数;设计的参数的具体含义为:a为减少输入力矩幅值的参数,T为输入段惯性环节的时间常数,其作用增加控制器设计自由度、减少“抖振”,Δ为判断是否进行力矩幅值切换的变量,ε是消除抖振的参数,K为滑模面中姿态角的系数,为滑模面中姿态角的饱和值,ΔI为减少