
单轴轮控快速姿态机动卫星的变结构控制模型的建模方法.pdf

Wi****m7


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单轴轮控快速姿态机动卫星的变结构控制模型的建模方法.pdf
单轴轮控快速姿态机动卫星的变结构控制模型的建模方法,它涉及卫星姿态控制技术领域。该方法解决现有传统变结构控制器不适用于快速机动卫星,以及传统变结构控制器设计方法不具通用性的问题。所述方法包括以下步骤:所述方法包括以下步骤:求解a、T、Δ、ε、K、ΔI为需要设计的参数;设计的参数的具体含义为:a为减少输入力矩幅值的参数,T为输入段惯性环节的时间常数,其作用增加控制器设计自由度、减少“抖振”,Δ为判断是否进行力矩幅值切换的变量,ε是消除抖振的参数,K为滑模面中姿态角的系数,为滑模面中姿态角的饱和值,ΔI为减少

单轴台的大角度姿态快速机动联合控制方法.docx
单轴台的大角度姿态快速机动联合控制方法本文将介绍一种单轴台的大角度姿态快速机动联合控制方法。该方法主要分为三个部分:姿态控制器设计、控制器参数调整和控制器稳定性分析。一、姿态控制器设计在单轴台系统中,姿态控制器的主要任务是将系统保持在期望姿态下。在本方法中,设计了一个两级级联控制器,准确地跟踪期望态勾的姿态。第一级是基于PID控制器的角速度控制器,通过比较期望角速度和实际角速度来调整系统响应。第二级是基于LQR(线性二次型调节器)控制器的姿态控制器,通过计算正确的控制输入来产生所需的期望角度。该控制器是由

三轴稳定挠性卫星的PD及滑模变结构姿态控制方法研究.docx
三轴稳定挠性卫星的PD及滑模变结构姿态控制方法研究随着航天技术的不断发展,卫星的应用范围越来越广泛,但是卫星在航天过程中对于姿态的控制非常重要,因此卫星姿态控制技术也越来越受到关注。稳定挠性卫星是一种特殊的卫星,其具有很高的挠度和柔性,因此对于其姿态控制具有很高的要求。本论文研究了三轴稳定挠性卫星的PD及滑模变结构姿态控制方法。一、卫星姿态控制概述卫星姿态控制主要是为了调整卫星的姿态,让其保持在所需的方向、角度和速度,以满足其特定的任务需求。卫星姿态控制方法包括机械陀螺、反作用轮、磁强计、星敏感器等多种形
一种敏捷小卫星姿态快速机动控制方法.pdf
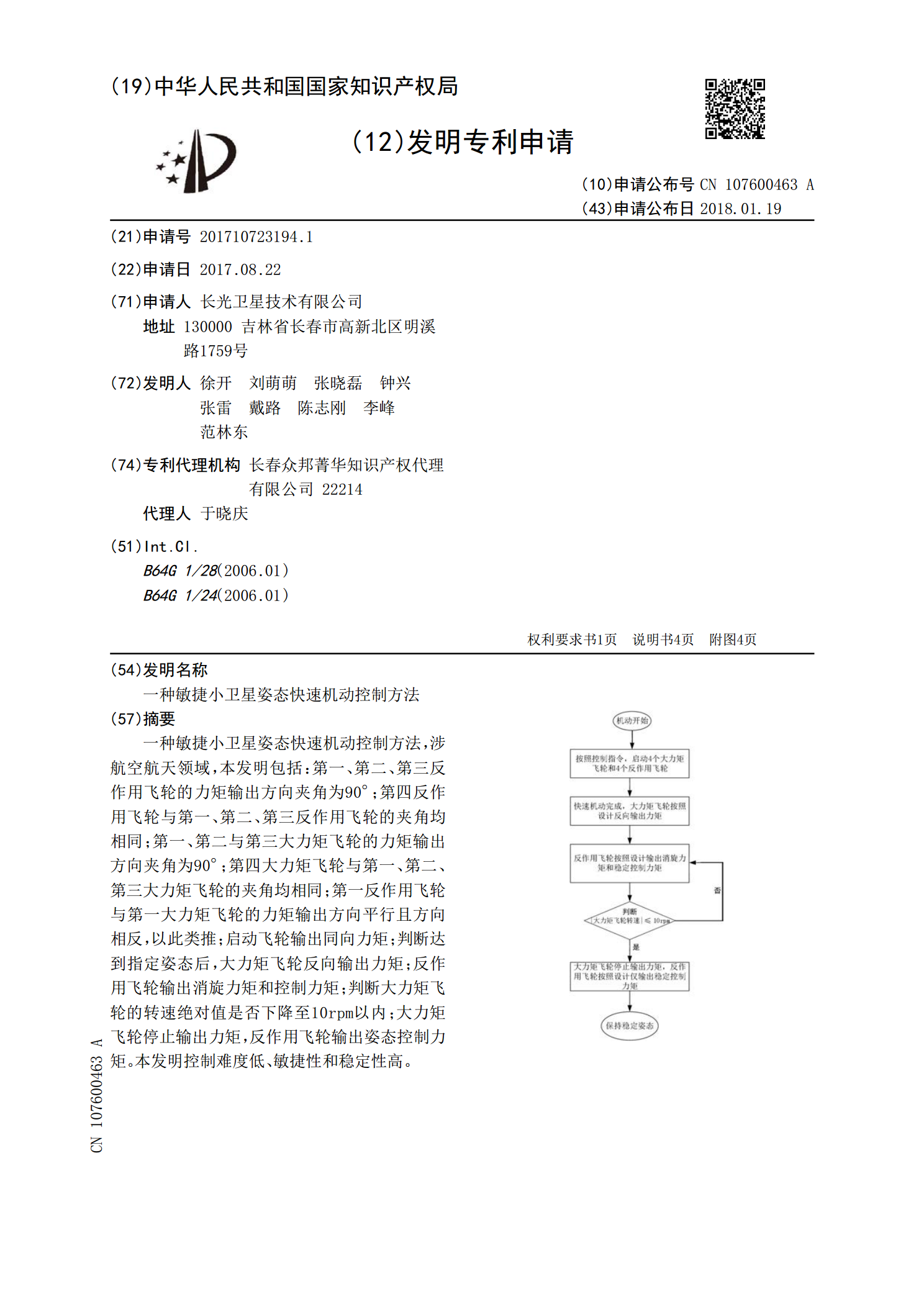
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力

三轴稳定挠性卫星的PD及滑模变结构姿态控制方法研究的综述报告.docx
三轴稳定挠性卫星的PD及滑模变结构姿态控制方法研究的综述报告随着卫星技术的不断发展和应用范围的扩大,对卫星姿态精度和稳定性的要求越来越高。稳定挠性卫星是一种结构灵活性大、动态响应特性复杂的卫星,其姿态控制面临许多挑战。因此,对于稳定挠性卫星的姿态控制方法研究至关重要。本文将综述三轴稳定挠性卫星的PD控制及滑模变结构控制方法,其技术原理、特点以及应用情况等方面。一、PD控制方法PD控制方法简单易懂,常用于三轴稳定卫星的姿态控制中。PD控制方法分为比例控制和微分控制两部分。比例控制是根据姿态误差与比例系数之间