
基于路径规划的敏捷卫星姿态机动反馈控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于路径规划的敏捷卫星姿态机动反馈控制方法.docx
基于路径规划的敏捷卫星姿态机动反馈控制方法摘要卫星姿态机动控制是实现卫星在轨姿态控制的重要手段,针对卫星姿态控制中路径规划和反馈控制的相关问题,本文提出了基于路径规划的敏捷卫星姿态机动反馈控制方法。首先介绍了卫星姿态机动控制的背景和意义,然后分析了卫星姿态机动控制中存在的路径规划和反馈控制问题,并提出了基于路径规划的敏捷姿态机动控制方法以及反馈控制方法。最后,通过数值实验验证了本文提出的方法的可行性和有效性。关键词:卫星姿态机动、路径规划、反馈控制、敏捷姿态控制、数值实验一、引言随着卫星技术的快速发展,遥

基于力矩陀螺的高分敏捷小卫星姿态机动控制研究.docx
基于力矩陀螺的高分敏捷小卫星姿态机动控制研究标题:基于力矩陀螺的高分辨率敏捷小卫星姿态机动控制研究摘要:小卫星作为现代航天技术发展的重要组成部分,具有成本低、开发周期短、可灵活组网等优势。然而,小卫星的姿态控制问题一直是限制其应用范围和性能提升的瓶颈之一。本文针对小卫星的姿态机动控制问题,提出了一种基于力矩陀螺技术的策略。通过文献综述和实验验证,本研究证明了力矩陀螺在提高小卫星姿态机动控制精度和稳定性方面的潜力。本文对小卫星姿态机动控制方案的设计和优化进行了详细的描述,并提出了一种有效的控制算法。实验结果

基于有向无圈图的敏捷卫星姿态机动策略.pdf
"#$%!&"!"#$#%&''(<,8!"#$%!#%#$#&%'()*+,-(./0121+34+150*6178(.90*(+,)71:6,+;967*(+,)71:6=(->%#!?(@&摇摇5=¿k1}V@~Õd{|ÁÂÃ!!Ä!Å#?@ABACD+:A+L$?@$##$G$%!!P!!!Q!+,ÁÆÇÈB´b|·¸]HZÉÊˤZïºÞ|ËÑíH̪ÎWyz>?$@ABCDE·¸Í¯lÿ΢HÁÆÇÈ̪ÎWyz¶L>«¶L¬a¿Ï'¤º'e~PÐÑÄå'$ ba
一种敏捷小卫星姿态快速机动控制方法.pdf
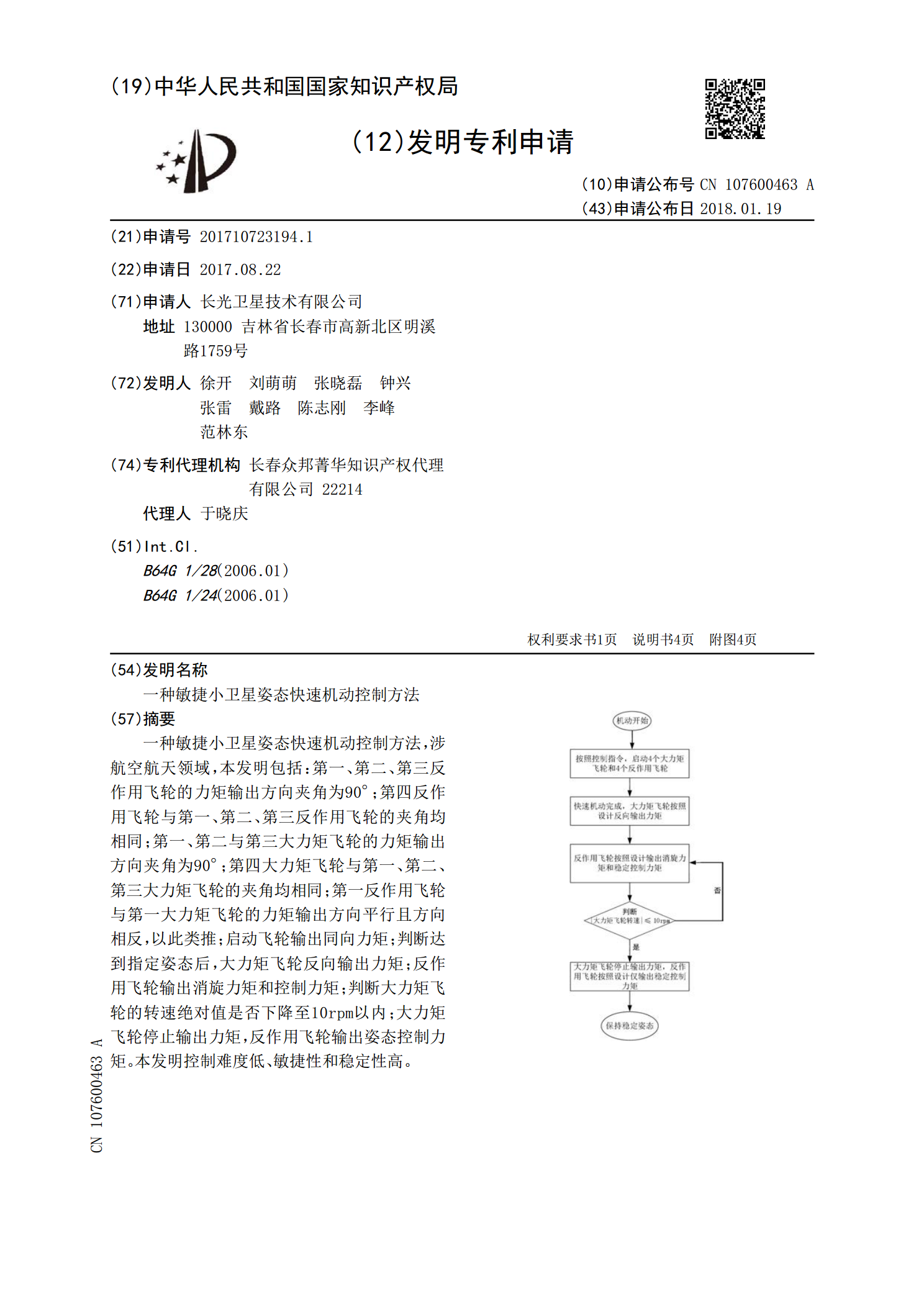
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力

超敏捷卫星姿态机动与稳定控制算法研究的任务书.docx
超敏捷卫星姿态机动与稳定控制算法研究的任务书一、任务背景卫星在现代战争、通信、遥感等领域扮演着非常重要的角色,因而卫星技术日益发展,从初期的简单轨道卫星逐渐发展到现在多功能、高技术的卫星。但在卫星的运行过程中,由于外部环境的影响以及自身其他因素的影响,卫星姿态可能会产生变化,最终导致卫星失控甚至失效。因此,如何实现卫星的姿态机动控制和稳定控制是一个非常关键的技术问题。为了解决这一问题,需要研究超敏捷卫星姿态机动与稳定控制算法。超敏捷卫星在储备姿态变化的同时,能够快速响应外部环境的变化,并通过控制器来实现对