
一种机械臂减速关节结构.pdf

秀华****魔王


1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
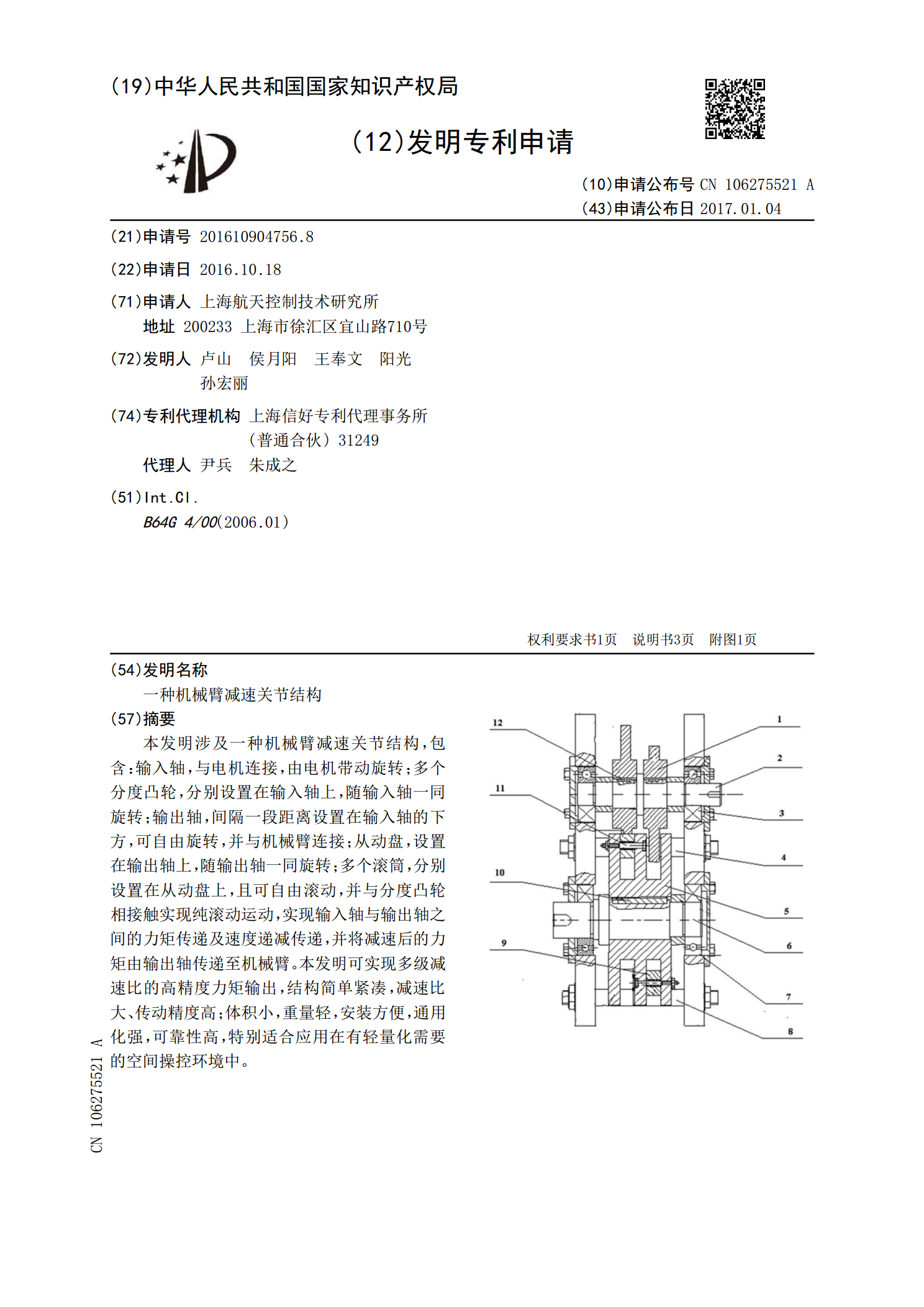
一种机械臂减速关节结构.pdf
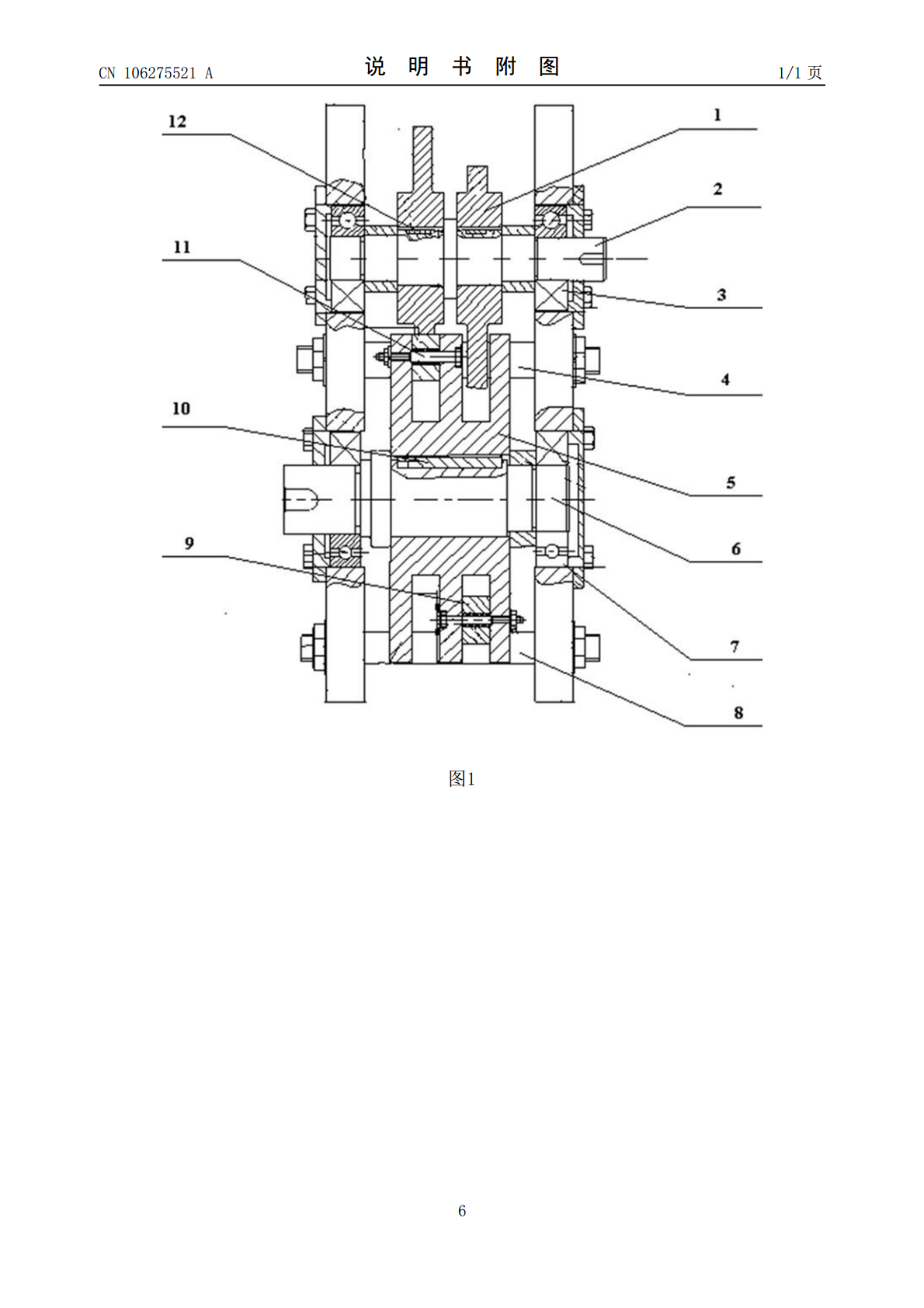
本发明涉及一种机械臂减速关节结构,包含:输入轴,与电机连接,由电机带动旋转;多个分度凸轮,分别设置在输入轴上,随输入轴一同旋转;输出轴,间隔一段距离设置在输入轴的下方,可自由旋转,并与机械臂连接;从动盘,设置在输出轴上,随输出轴一同旋转;多个滚筒,分别设置在从动盘上,且可自由滚动,并与分度凸轮相接触实现纯滚动运动,实现输入轴与输出轴之间的力矩传递及速度递减传递,并将减速后的力矩由输出轴传递至机械臂。本发明可实现多级减速比的高精度力矩输出,结构简单紧凑,减速比大、传动精度高;体积小,重量轻,安装方便,通用化
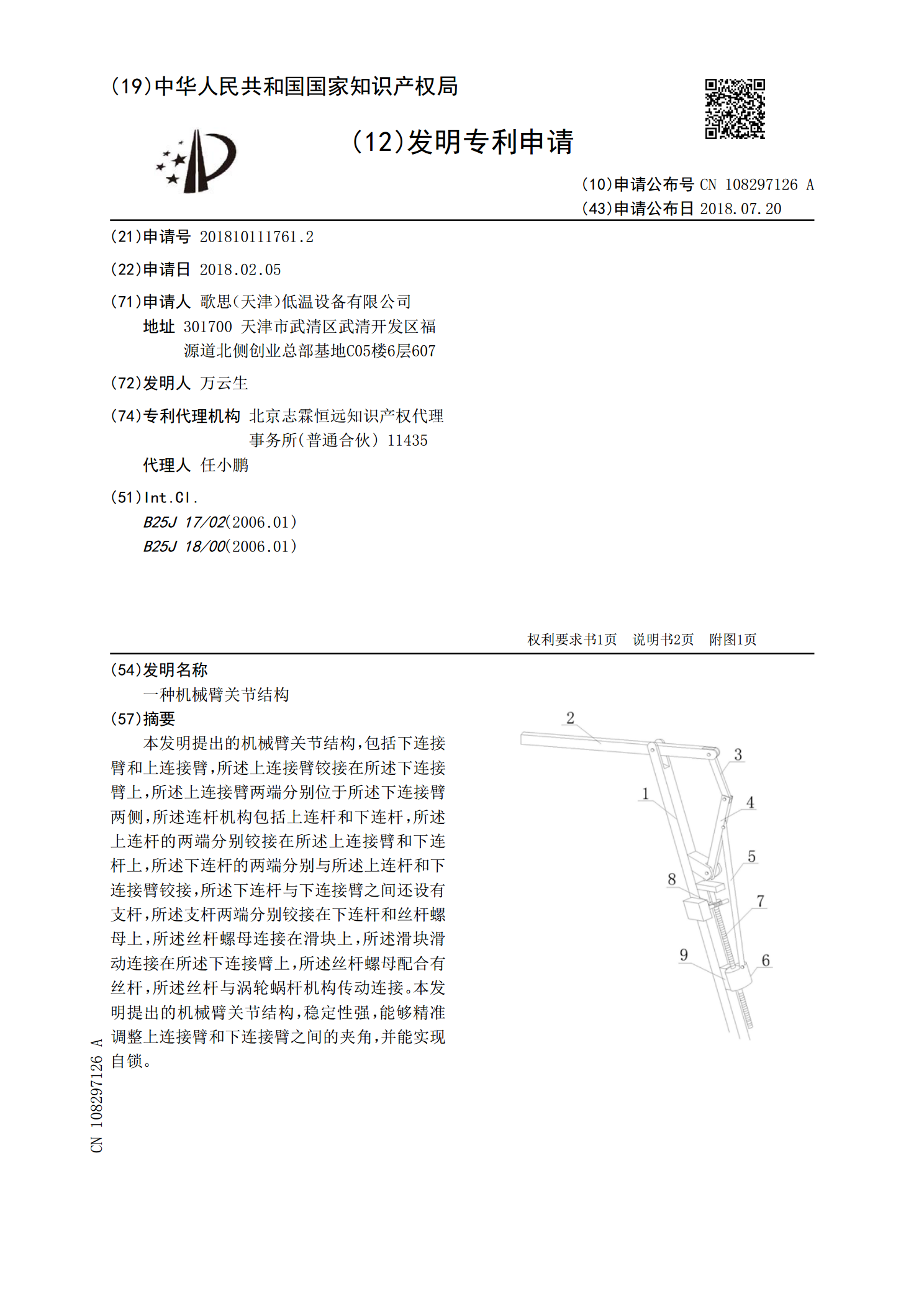
一种机械臂关节结构.pdf
本发明提出的机械臂关节结构,包括下连接臂和上连接臂,所述上连接臂铰接在所述下连接臂上,所述上连接臂两端分别位于所述下连接臂两侧,所述连杆机构包括上连杆和下连杆,所述上连杆的两端分别铰接在所述上连接臂和下连杆上,所述下连杆的两端分别与所述上连杆和下连接臂铰接,所述下连杆与下连接臂之间还设有支杆,所述支杆两端分别铰接在下连杆和丝杆螺母上,所述丝杆螺母连接在滑块上,所述滑块滑动连接在所述下连接臂上,所述丝杆螺母配合有丝杆,所述丝杆与涡轮蜗杆机构传动连接。本发明提出的机械臂关节结构,稳定性强,能够精准调整上连接臂
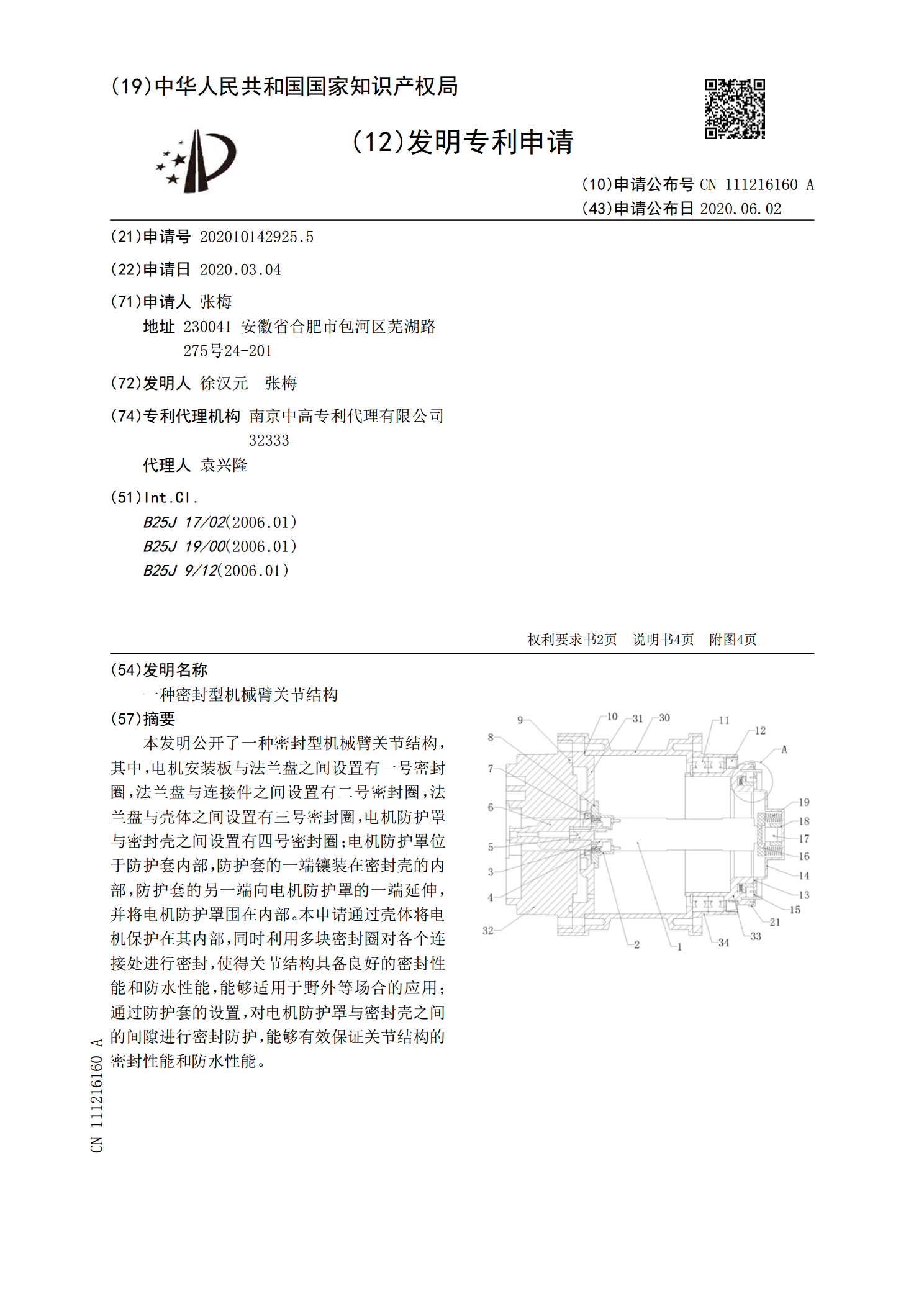
一种密封型机械臂关节结构.pdf
本发明公开了一种密封型机械臂关节结构,其中,电机安装板与法兰盘之间设置有一号密封圈,法兰盘与连接件之间设置有二号密封圈,法兰盘与壳体之间设置有三号密封圈,电机防护罩与密封壳之间设置有四号密封圈;电机防护罩位于防护套内部,防护套的一端镶装在密封壳的内部,防护套的另一端向电机防护罩的一端延伸,并将电机防护罩围在内部。本申请通过壳体将电机保护在其内部,同时利用多块密封圈对各个连接处进行密封,使得关节结构具备良好的密封性能和防水性能,能够适用于野外等场合的应用;通过防护套的设置,对电机防护罩与密封壳之间的间隙进行

一种用于水下机械臂的大功率减速关节.pdf
本发明公开了一种用于水下机械臂的大功率减速关节,包括驱动仓和与驱动仓连接的主壳体,驱动仓内设置有转动驱动装置,转动驱动装置的转动端伸出驱动仓后与转动设置在主壳体内的激波凸轮连接,主壳体的内壁设置有与激波凸轮的偏心传动面对应的活齿固定齿圈,主壳体内转动设置有活动支架,活动支架上周向间隔设置有若干与活齿固定齿圈的内圆周齿面以及激波凸轮的偏心传动面配合的滚轮组件,活动支架的输出端与主壳体外的主输出端连接,当转动驱动装置的转动端转动时,带动激波凸轮转动,滚轮组件在激波凸轮的偏心传动面与活齿固定齿圈的内圆周齿面的共
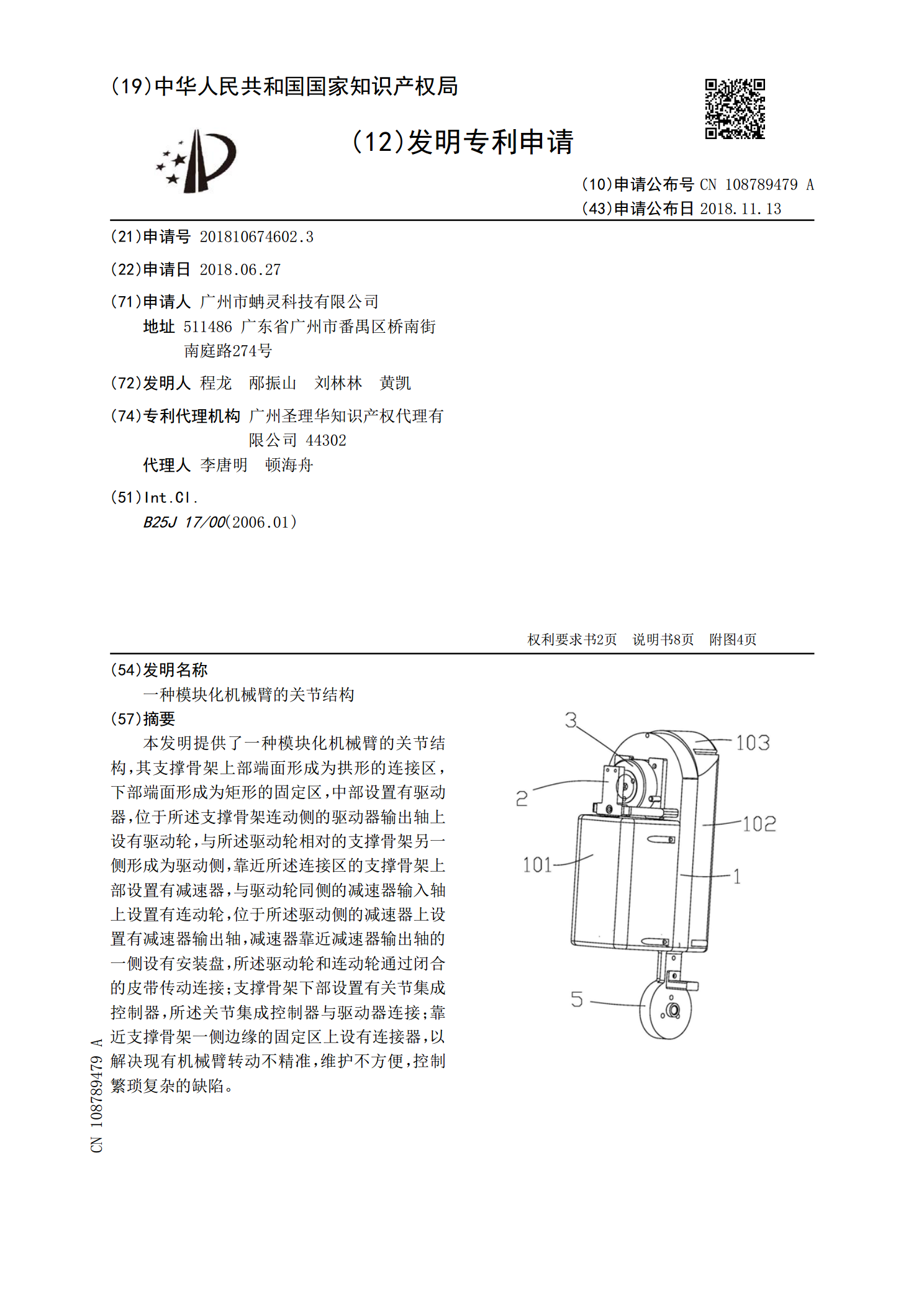
一种模块化机械臂的关节结构.pdf
本发明提供了一种模块化机械臂的关节结构,其支撑骨架上部端面形成为拱形的连接区,下部端面形成为矩形的固定区,中部设置有驱动器,位于所述支撑骨架连动侧的驱动器输出轴上设有驱动轮,与所述驱动轮相对的支撑骨架另一侧形成为驱动侧,靠近所述连接区的支撑骨架上部设置有减速器,与驱动轮同侧的减速器输入轴上设置有连动轮,位于所述驱动侧的减速器上设置有减速器输出轴,减速器靠近减速器输出轴的一侧设有安装盘,所述驱动轮和连动轮通过闭合的皮带传动连接;支撑骨架下部设置有关节集成控制器,所述关节集成控制器与驱动器连接;靠近支撑骨架一