
具有越障功能的摆动臂式高压线爬行机器人.pdf

沛芹****ng


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有越障功能的摆动臂式高压线爬行机器人.pdf
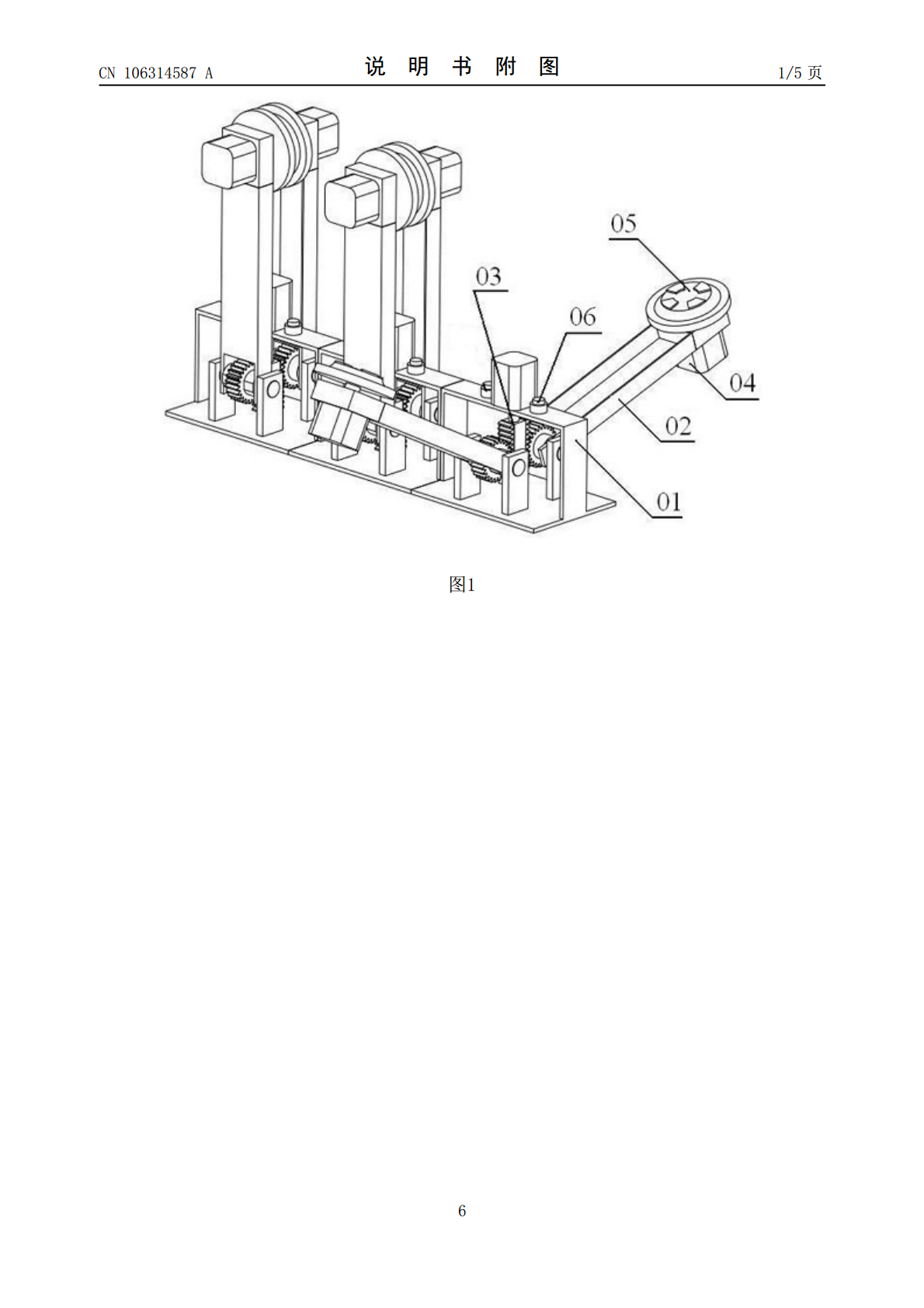
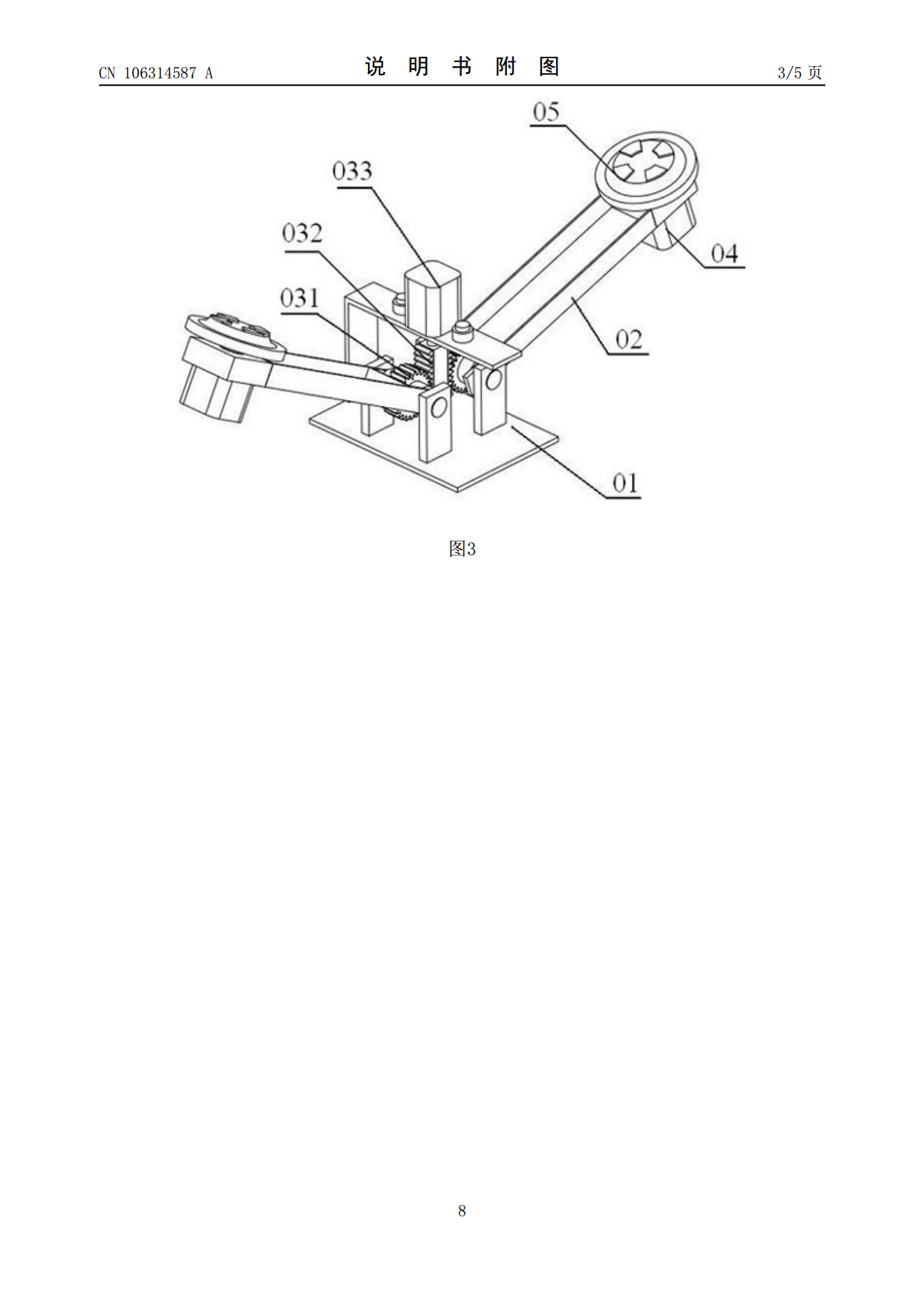
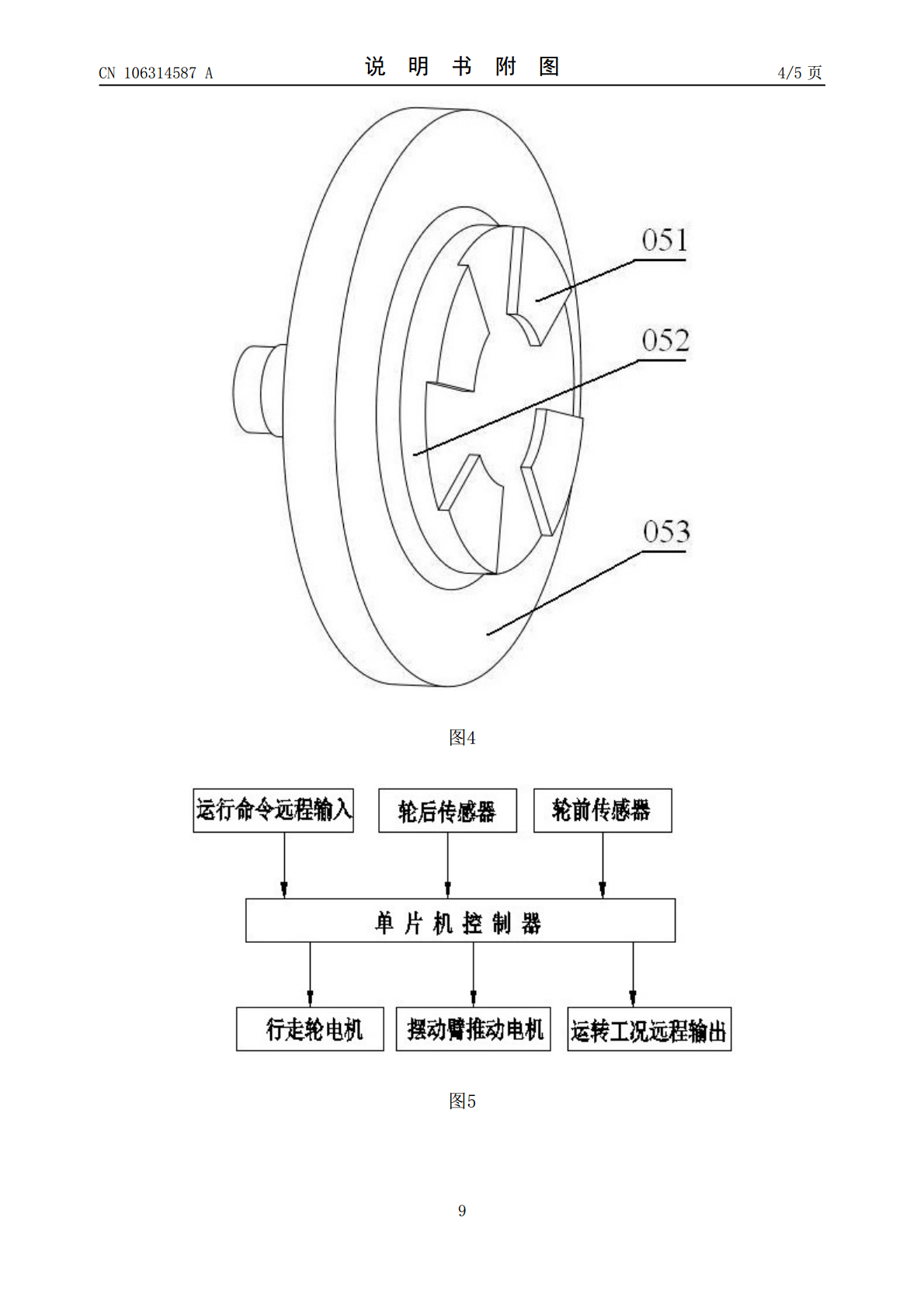
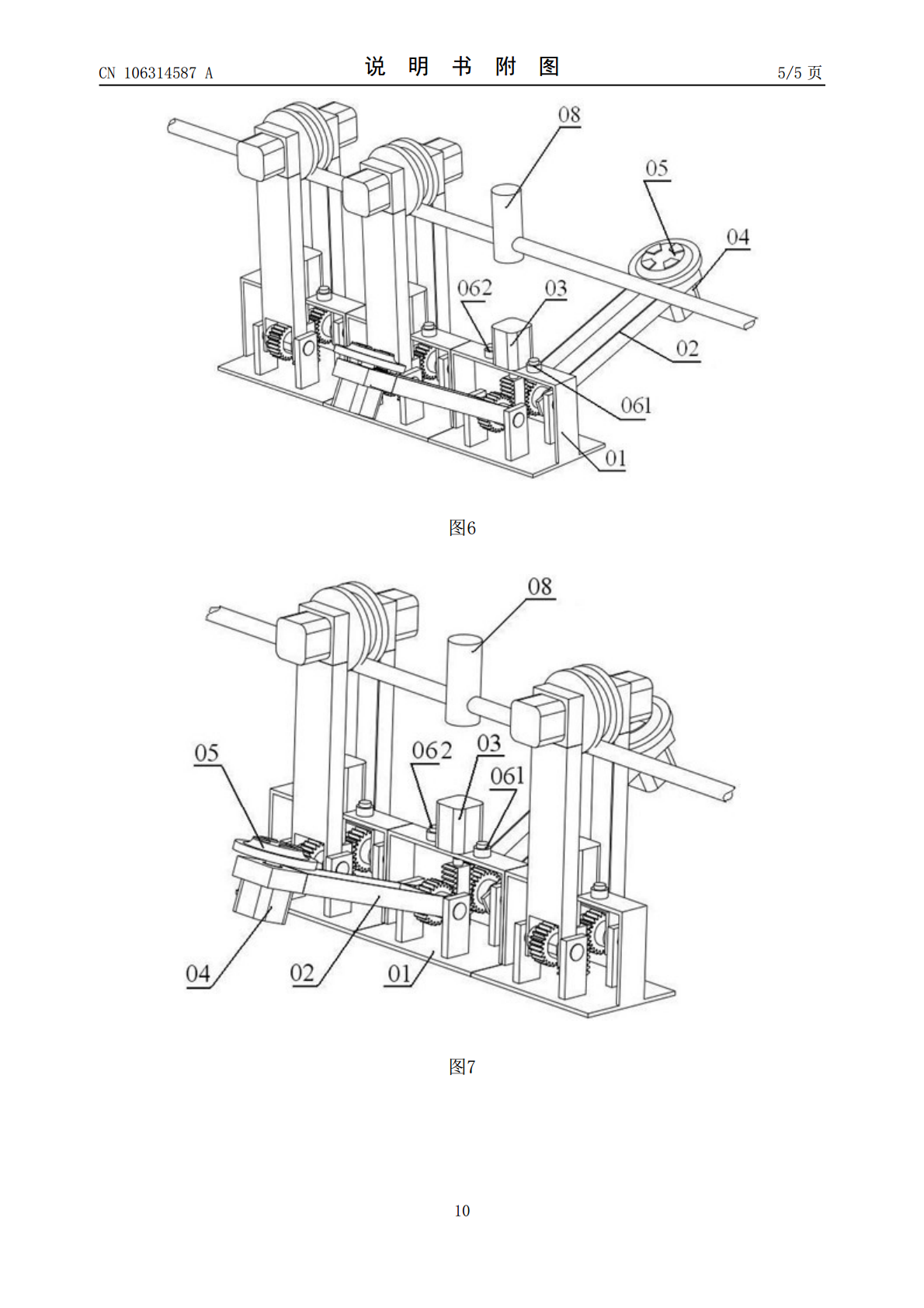
本发明提供了一种具有越障功能的摆动臂式高压线爬行机器人,其底座上方沿单一方向设置多组摆动臂组合,每组摆动臂组合包含两个呈对称布置的摆动臂,摆动臂上端的内侧设置有电机驱动的行走轮元件,摆动臂的下端与底座铰接,摆动臂与底座之间设置有实现摆动臂张开或闭合动作的推动机构。在没有障碍物的高压线上,摆动臂向内闭合,两个摆动臂上端的行走轮元件压紧而组合成行走轮,电机驱动行走轮转动,机器人沿着高压线前进;当遇到障碍物时,相应的摆动臂带动行走轮元件向外张开,越过障碍物。本发明提供的高压线爬行机器人能够越过高压线上的障碍物,

基于移动臂越障的高压线爬行机器人.pdf
本发明提供了一种基于移动臂越障的高压线爬行机器人,其底座上方沿单一方向设置多组移动臂组合,每组移动臂组合包含两个沿底座竖直中心面对称布置的移动臂,移动臂上端的内侧设置有电机驱动的行走轮组件,移动臂与底座之间设置有实现移动臂同时向外或向内移动的推动机构。移动臂向内移动闭合,两个移动臂上端的行走轮组件端面压紧而组成具有双轮缘的行走轮,行走轮转动而带动机器人沿着高压线前进;当遇到障碍物时,移动臂同时向外移动,行走轮组件分开,越过障碍物。本发明提供的高压线爬行机器人结构简单,能够越过高压线上的障碍物,增强了越障能

具有越障功能的线路机器人驱动臂.pdf
本发明公开了一种具有越障功能的线路机器人驱动臂,是一种高压输电线路巡线及作业机器人驱动臂,尤其是用在沿输电导线行走、进行检测、作业的机器人驱动臂。本发明包括驱动轮机构、旋转关节和升降关节,驱动轮机构包括固定板,固定板上活动连接有驱动装置;旋转关节包括旋转轴和电磁离合器,电磁离合器套设在旋转轴上,旋转轴的中部活动连接有连接件;升降关节包括底板,底板上设有滑动装置和丝杠装置,两者通过连接板固定连接;驱动轮机构通过固定板与旋转关节的连接件连接,旋转关节旋转轴的一端与升降关节的连接板相连。本发明可根据机器人总体结

摆动式升降越障机器人.pdf
本发明公开了一种摆动式升降越障机器人,包括车架,车架于前端的两侧部装设有两个前驱动轮,车架于后端的两侧部装设有两个后驱动轮,车架上装设有摆动支撑机构,摆动支撑机构上装设有升降导向支撑架,升降导向支撑架的前后端均装设有可独立升降和行进的升降行进机构,前驱动轮和后驱动轮中的一组轮体位于两个升降行进机构之间。通过升降导向支撑架的前后摆动,使得越障机器人在上、下台阶式障碍的模态间转换,该越障机器人具有结构简单可靠,成本低廉,易于制作、作业灵活、越障能力强的优点。

具有越障功能的机器人.pdf
本发明涉及机器人设备技术领域,尤其是涉及一种具有越障功能的机器人,包括基座、连接杆、滚轮、支撑板、第一弹簧、第二弹簧、限位柱和第一杆,所述连接杆转动设置在所述基座上,所述基座上设置有用于驱动连接杆摆动的第一电机,所述连接杆的两端均设置有所述滚轮,所述连接杆上设置有用于驱动滚轮转动的第二电机,本发明具有越障功能的机器人在使用时,通过基座上的支撑板支撑在管道上,同时控制连接杆往复摆动,使得连接杆上一端的滚轮与管道连接,从而控制机器人在管道上行走,在越障时,通过第一杆与法兰盘接触带动限位柱脱离卡槽,同时法兰盘作