
一种辅助架空地线巡线机器人跨越直线杆的无障碍通道.pdf

猫巷****正德


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种辅助架空地线巡线机器人跨越直线杆的无障碍通道.pdf
本发明公开了一种辅助架空地线巡线机器人跨越直线杆的无障碍通道,包括对称设置于悬垂线夹两侧导向件,导向件的顶端固定导轨的两端,所述导轨的中端具有一外凸于悬垂线夹的弯曲部分,且此弯曲部分所在平面与地线平行,所述导向件为顶端具有一坡度的弧形,所述导向件朝向悬垂线夹的一侧高度大于其远离悬垂线夹的一侧,使得导轨的水平面与悬垂线夹不在同一平面,当机器人的行走轮沿导向件行驶至导轨上,跨越悬垂线夹,本发明结构简单、安装方便,不改变地线直线杆塔悬垂线夹的机械特性和电气特性。
架空地线巡线机器人跨越直线杆及防震锤的无障碍通道.pdf
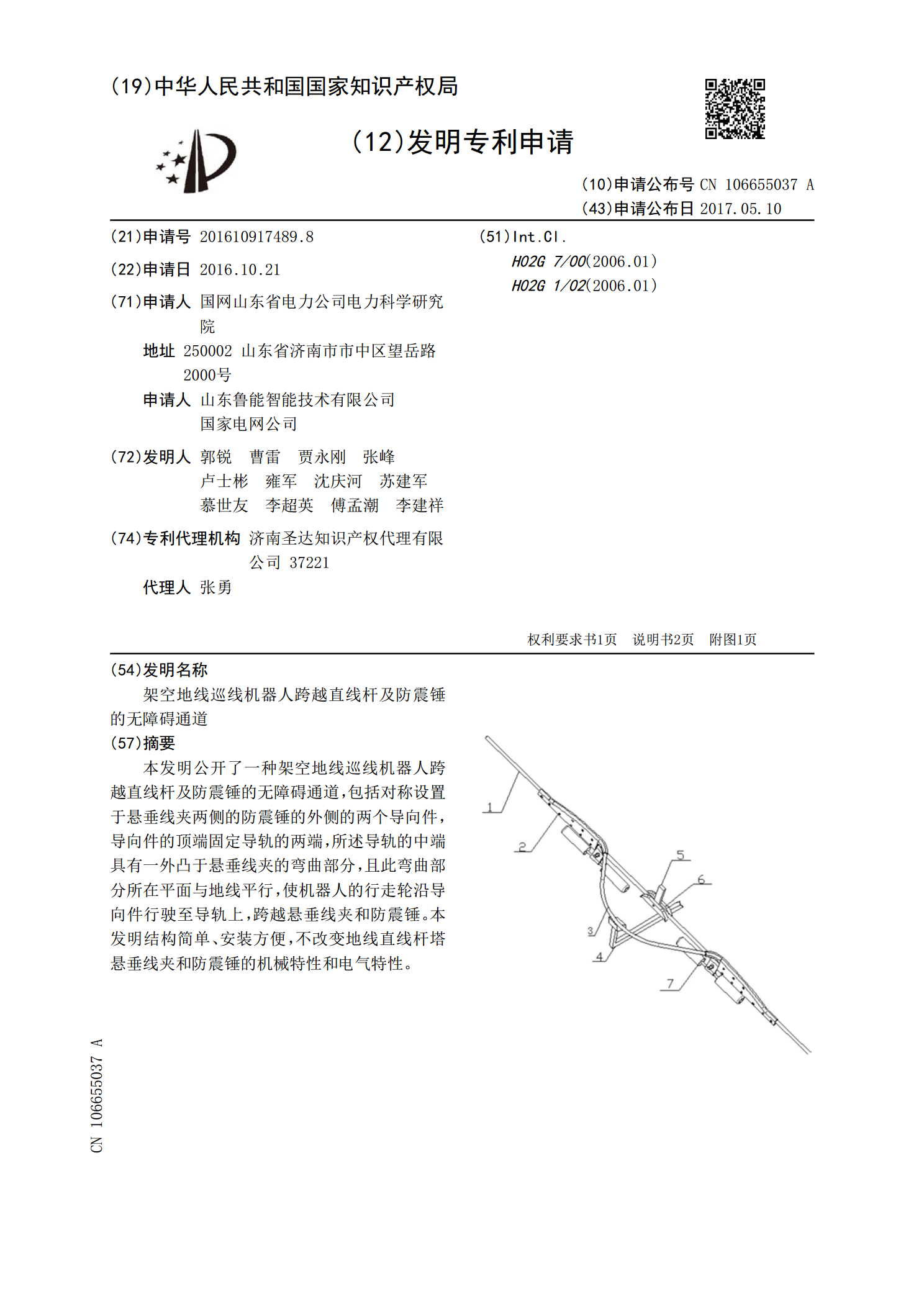
本发明公开了一种架空地线巡线机器人跨越直线杆及防震锤的无障碍通道,包括对称设置于悬垂线夹两侧的防震锤的外侧的两个导向件,导向件的顶端固定导轨的两端,所述导轨的中端具有一外凸于悬垂线夹的弯曲部分,且此弯曲部分所在平面与地线平行,使机器人的行走轮沿导向件行驶至导轨上,跨越悬垂线夹和防震锤。本发明结构简单、安装方便,不改变地线直线杆塔悬垂线夹和防震锤的机械特性和电气特性。

一种以架空地线为轨道的巡线机器人.pdf
本发明公开了一种以架空地线为轨道的巡线机器人,包括巡线车、轨道和钢缆,所述巡线车包括车体、前主动轮、后主动轮、夹紧轮和弹簧机构,所述前主动轮、后主动轮和夹紧轮安装在车体上;采用机械结构进行定位和运动,通过设计能够同时在钢缆和轨道上行驶的轮子,借助轨道端头的斜面、轮子的特殊形状和夹紧轮的弹簧机构相互配合实现巡线装置从钢缆到导轨的过渡三轮夹紧机构保证了巡线装置在钢缆上安全行驶,摒弃了复杂仿生机械臂。本装置结构简单、可靠性高、体积小、重量轻,方便安装、拆卸和维护,适用于大规模生产实践。

一种以架空地线为轨道的巡线机器人升降装置.pdf
本发明公开了一种以架空地线为轨道的巡线机器人升降装置,包括升降机构和搭载机构,通过机器人的搭载机构与升降机构相结合,采用搭载机构上的电机驱动升降驱动轮转动从而带动升降机构的蜗杆和蜗轮螺旋传动,可将机器人搭载机构升降至指定轨道位置,并可自动实现机器人搭载机构的轨道过度。同时,采用蜗杆和蜗轮的机构可实现自锁功能,不会出现升降过程中意外掉落的危险。本装置结构设计巧妙,具有很强的实用性。

一种巡线机器人跨越障碍滑移机构及巡线机器人设备.pdf
本发明涉及一种巡线机器人跨越障碍滑移机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组滑移组件,每组滑移组件均具有用于悬挂在输电线缆上随设备机架的带动而滑移的滑移挂轮;且所述滑移机构还包括:设置在位于前侧的滑移组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据线路障碍检测结果发送控制信号给所述至少三组滑移组件,以沿输电线缆方向依次控制每组滑移组件的滑移挂轮脱离所述输电线缆以跨越所述线路障碍。本发明的巡线机器人跨越障碍滑移机构及巡线机器人设备通过悬挂于输电线缆上的滑移挂轮支撑设备整体重量