
一种高精度张力控制系统及控制方法.pdf

一条****杉淑

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度张力控制系统及控制方法.pdf
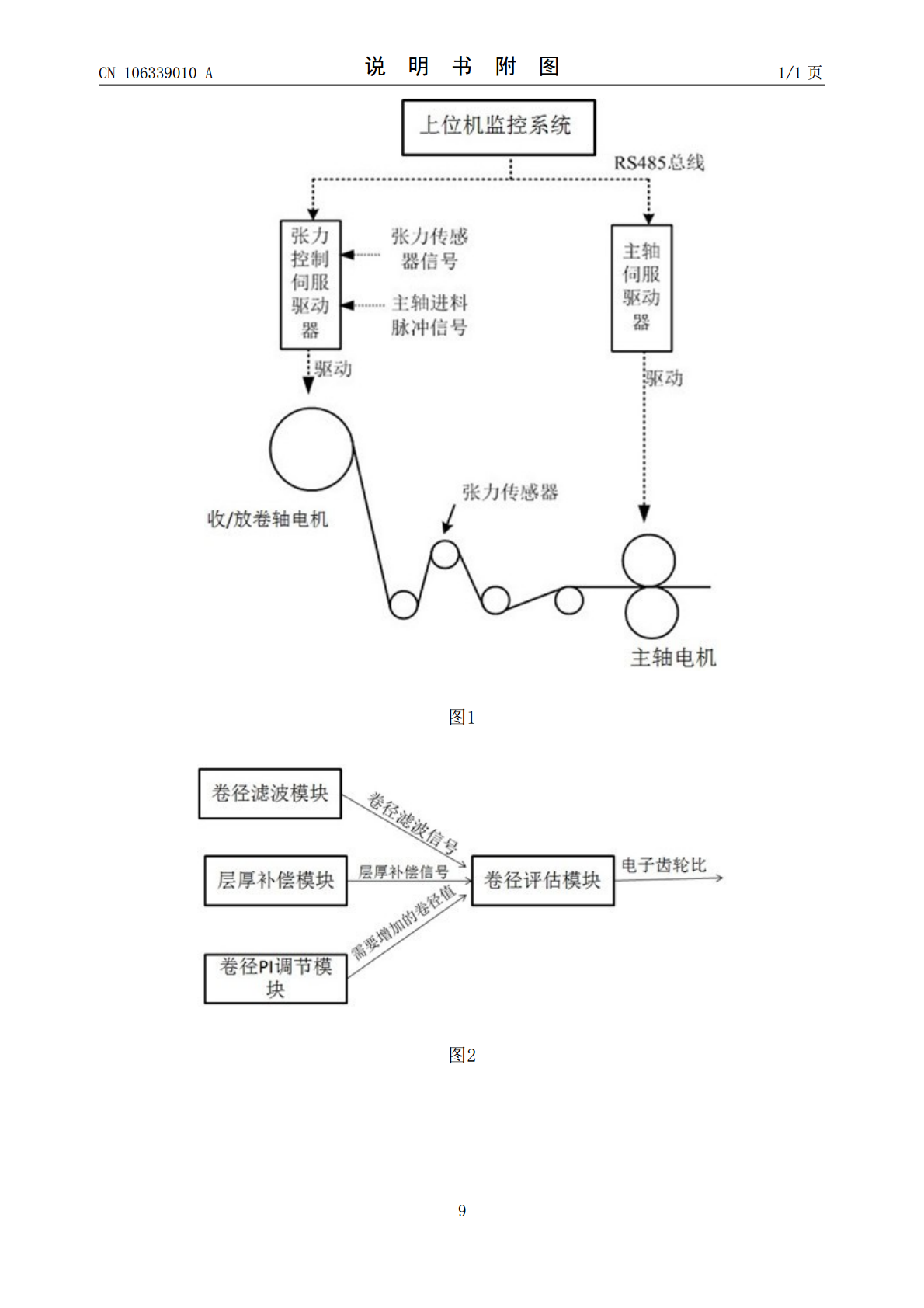
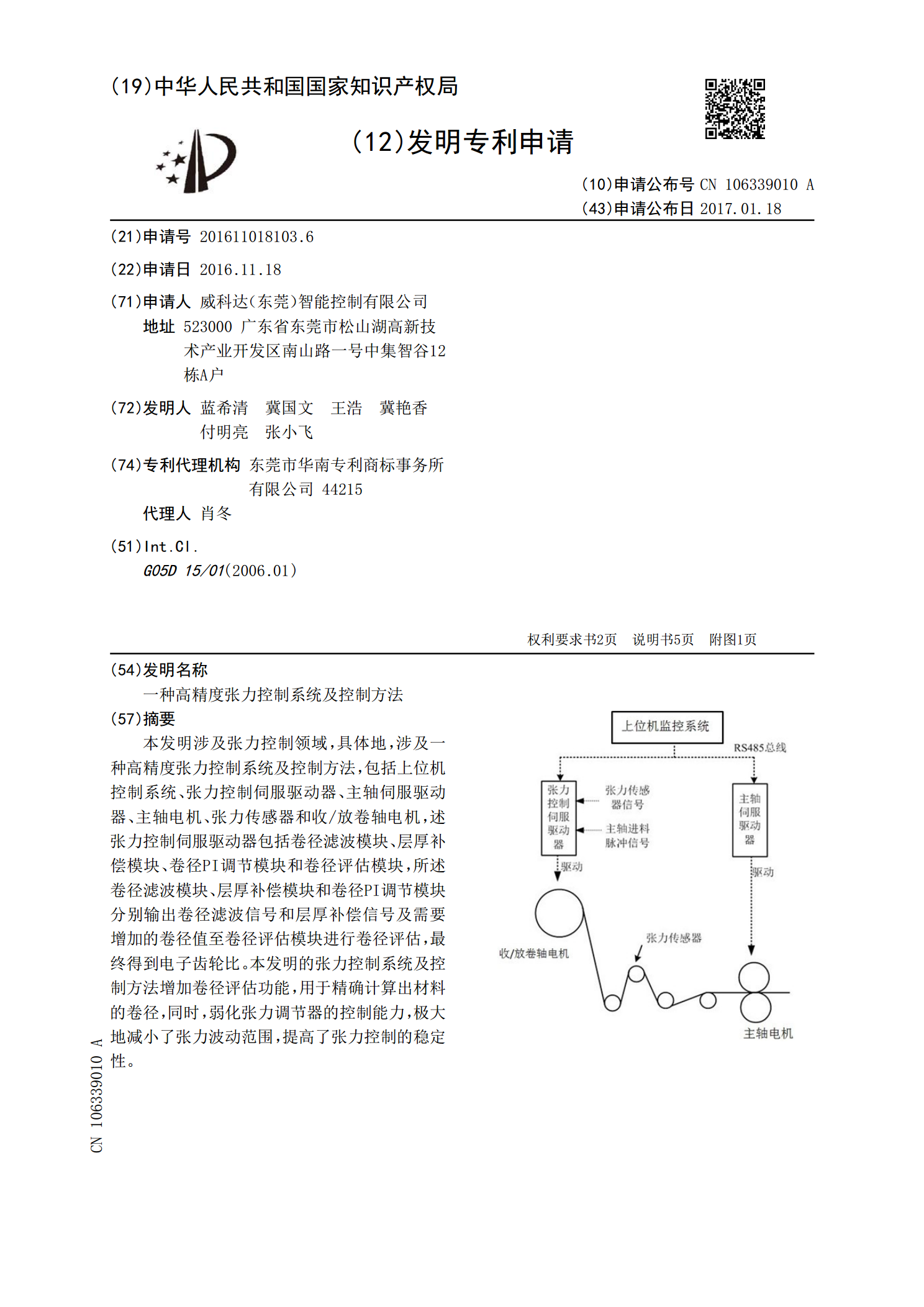
本发明涉及张力控制领域,具体地,涉及一种高精度张力控制系统及控制方法,包括上位机控制系统、张力控制伺服驱动器、主轴伺服驱动器、主轴电机、张力传感器和收/放卷轴电机,述张力控制伺服驱动器包括卷径滤波模块、层厚补偿模块、卷径PI调节模块和卷径评估模块,所述卷径滤波模块、层厚补偿模块和卷径PI调节模块分别输出卷径滤波信号和层厚补偿信号及需要增加的卷径值至卷径评估模块进行卷径评估,最终得到电子齿轮比。本发明的张力控制系统及控制方法增加卷径评估功能,用于精确计算出材料的卷径,同时,弱化张力调节器的控制能力,极大地减

张力控制方法及张力控制系统.pdf
本发明属于工业控制技术领域,具体涉及一种张力控制方法及张力控制系统。发明方法包括以下步骤:设置电子齿轮模块的初始卷径比,并启动主轴和从轴运转;主轴的编码器在运转过程中对反馈脉冲进行计数,并将计数值发送给所述从轴,所述从轴根据收到的脉冲数做跟随运转;当所述从轴转动一周时,重新计算所述卷径比;位置闭环模块计算控制速度值并发送给速度闭环模块;所述速度闭环模块对所述控制速度值进行调节后发送给扭矩闭环模块;所述扭矩闭环模块计算扭矩值并发送给所述从轴电机进行张力的控制;重复上述步骤,实现张力的持续控制。本发明的方法具
张力控制系统及方法.pdf
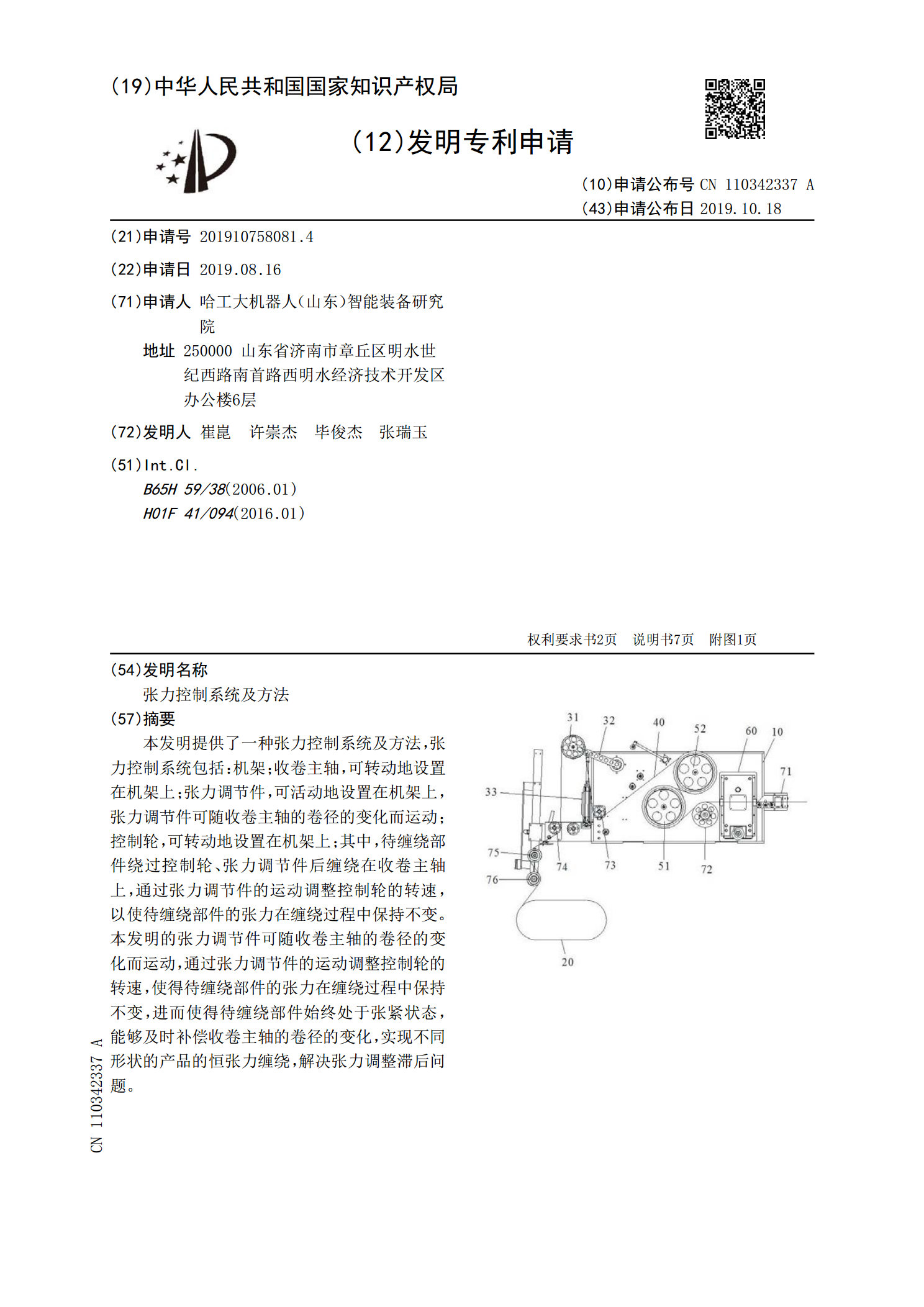
本发明提供了一种张力控制系统及方法,张力控制系统包括:机架;收卷主轴,可转动地设置在机架上;张力调节件,可活动地设置在机架上,张力调节件可随收卷主轴的卷径的变化而运动;控制轮,可转动地设置在机架上;其中,待缠绕部件绕过控制轮、张力调节件后缠绕在收卷主轴上,通过张力调节件的运动调整控制轮的转速,以使待缠绕部件的张力在缠绕过程中保持不变。本发明的张力调节件可随收卷主轴的卷径的变化而运动,通过张力调节件的运动调整控制轮的转速,使得待缠绕部件的张力在缠绕过程中保持不变,进而使得待缠绕部件始终处于张紧状态,能够及时
一种绕线张力控制装置、控制系统及控制方法.pdf
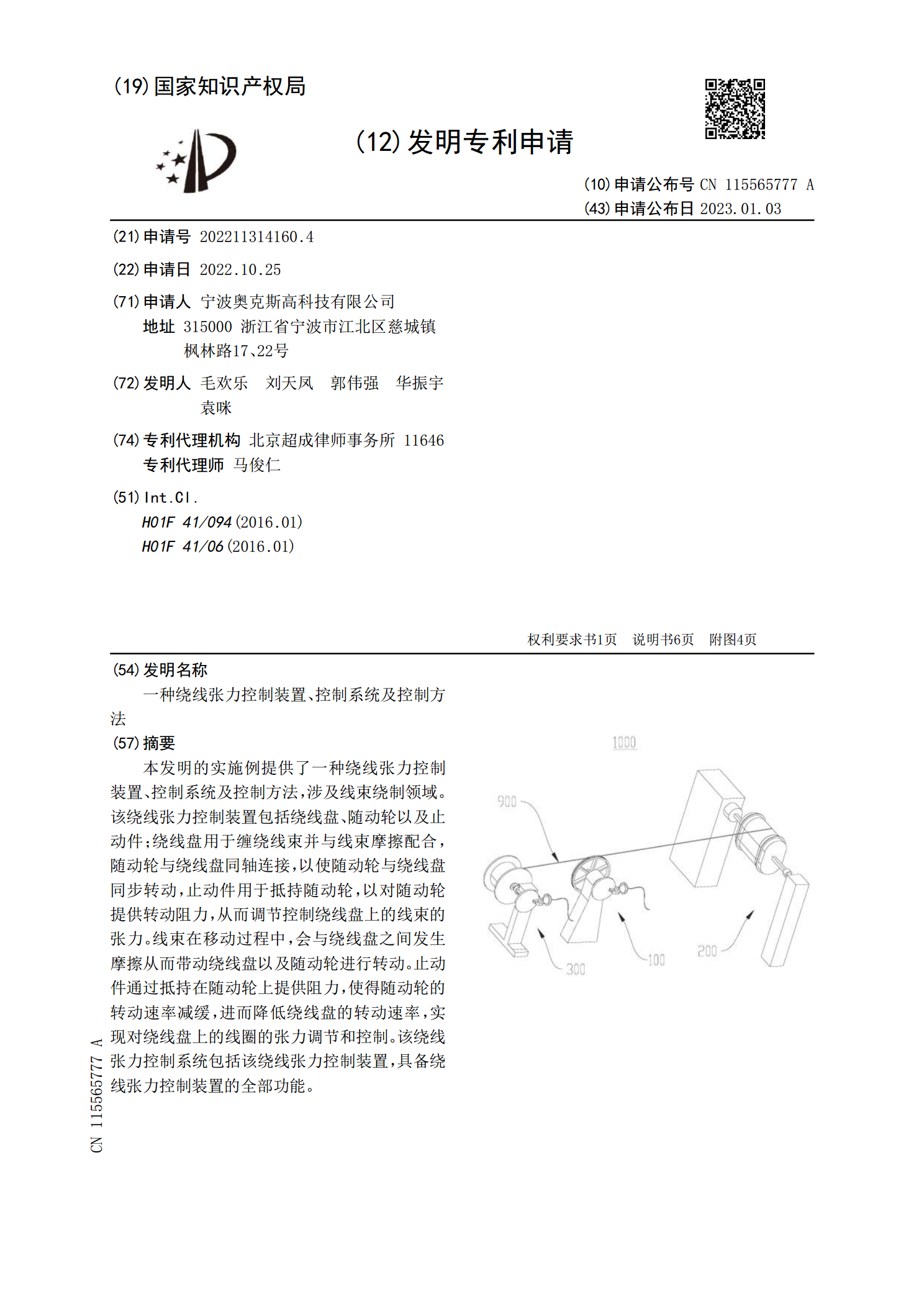
本发明的实施例提供了一种绕线张力控制装置、控制系统及控制方法,涉及线束绕制领域。该绕线张力控制装置包括绕线盘、随动轮以及止动件;绕线盘用于缠绕线束并与线束摩擦配合,随动轮与绕线盘同轴连接,以使随动轮与绕线盘同步转动,止动件用于抵持随动轮,以对随动轮提供转动阻力,从而调节控制绕线盘上的线束的张力。线束在移动过程中,会与绕线盘之间发生摩擦从而带动绕线盘以及随动轮进行转动。止动件通过抵持在随动轮上提供阻力,使得随动轮的转动速率减缓,进而降低绕线盘的转动速率,实现对绕线盘上的线圈的张力调节和控制。该绕线张力控制系
带张力控制系统和方法.pdf
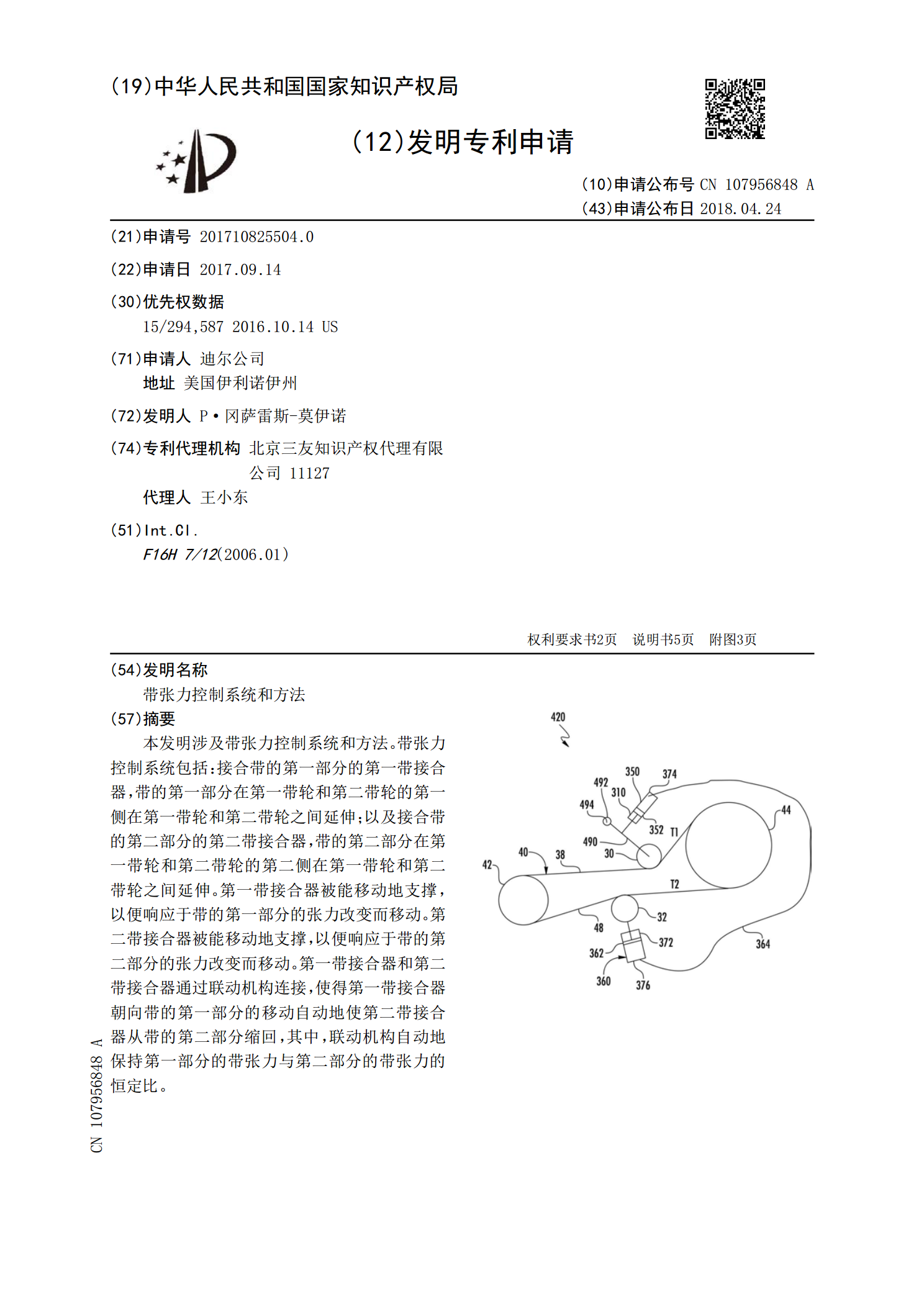
本发明涉及带张力控制系统和方法。带张力控制系统包括:接合带的第一部分的第一带接合器,带的第一部分在第一带轮和第二带轮的第一侧在第一带轮和第二带轮之间延伸;以及接合带的第二部分的第二带接合器,带的第二部分在第一带轮和第二带轮的第二侧在第一带轮和第二带轮之间延伸。第一带接合器被能移动地支撑,以便响应于带的第一部分的张力改变而移动。第二带接合器被能移动地支撑,以便响应于带的第二部分的张力改变而移动。第一带接合器和第二带接合器通过联动机构连接,使得第一带接合器朝向带的第一部分的移动自动地使第二带接合器从带的第二部