
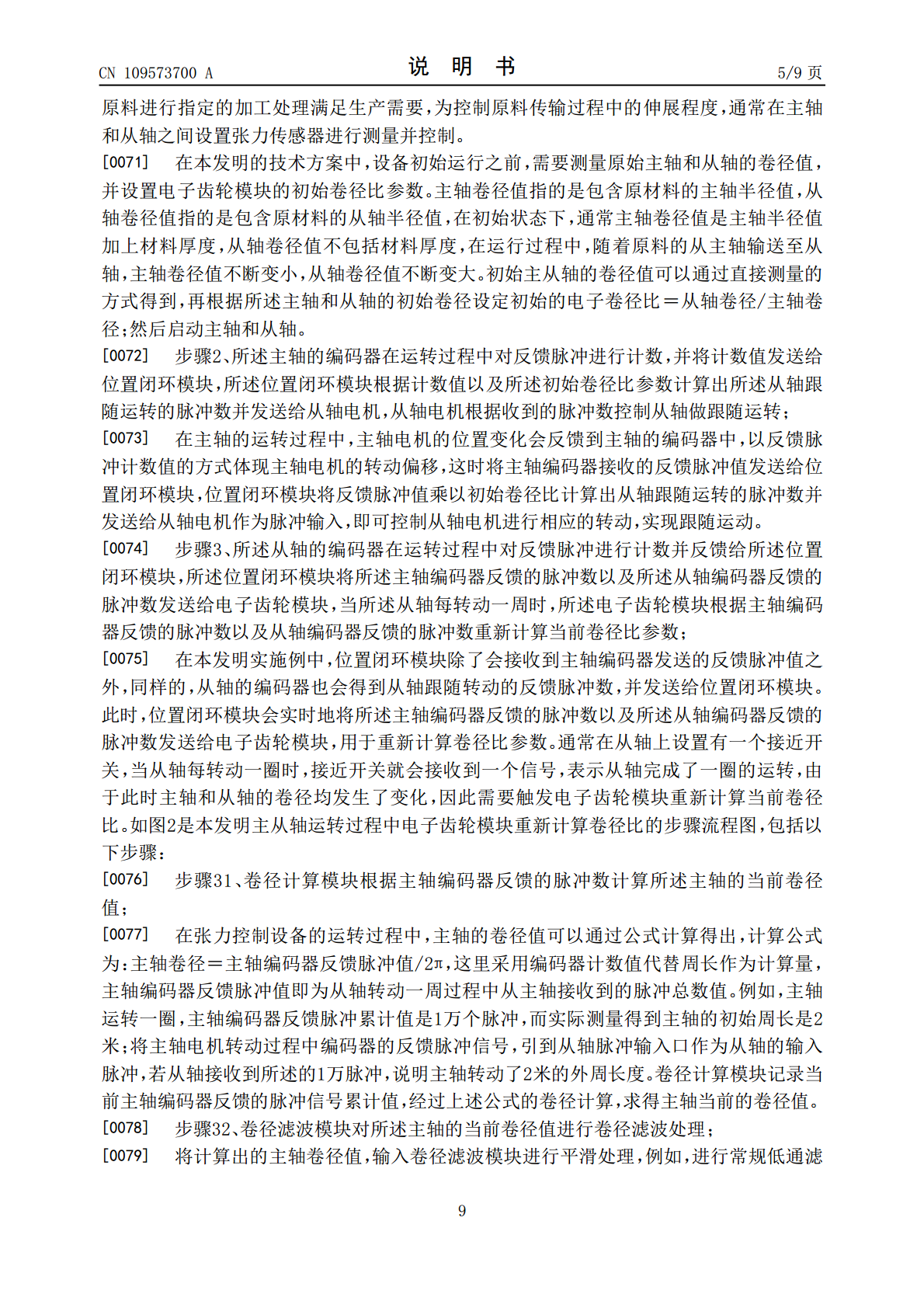
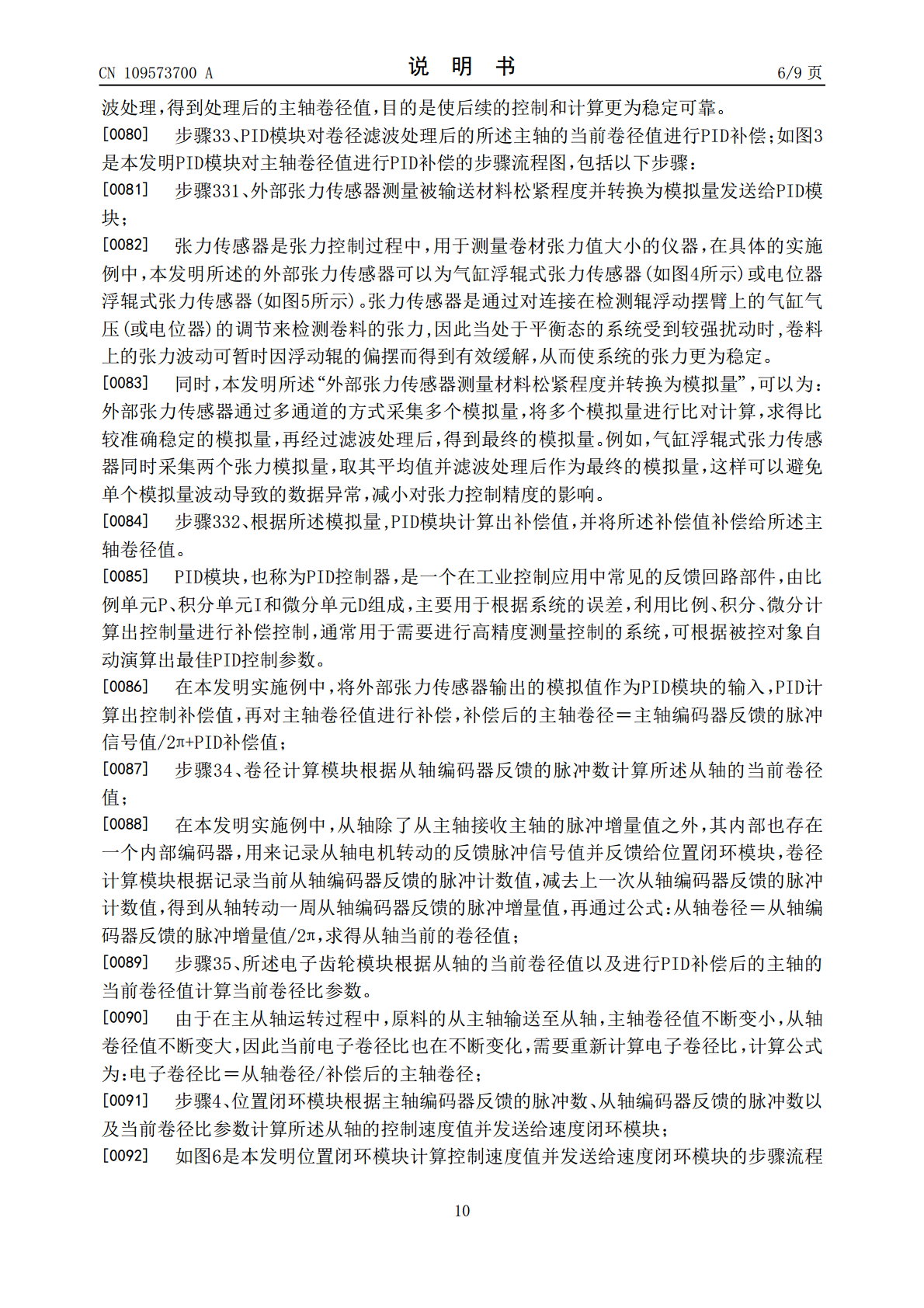
张力控制方法及张力控制系统.pdf

邻家****文章

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

张力控制方法及张力控制系统.pdf
本发明属于工业控制技术领域,具体涉及一种张力控制方法及张力控制系统。发明方法包括以下步骤:设置电子齿轮模块的初始卷径比,并启动主轴和从轴运转;主轴的编码器在运转过程中对反馈脉冲进行计数,并将计数值发送给所述从轴,所述从轴根据收到的脉冲数做跟随运转;当所述从轴转动一周时,重新计算所述卷径比;位置闭环模块计算控制速度值并发送给速度闭环模块;所述速度闭环模块对所述控制速度值进行调节后发送给扭矩闭环模块;所述扭矩闭环模块计算扭矩值并发送给所述从轴电机进行张力的控制;重复上述步骤,实现张力的持续控制。本发明的方法具
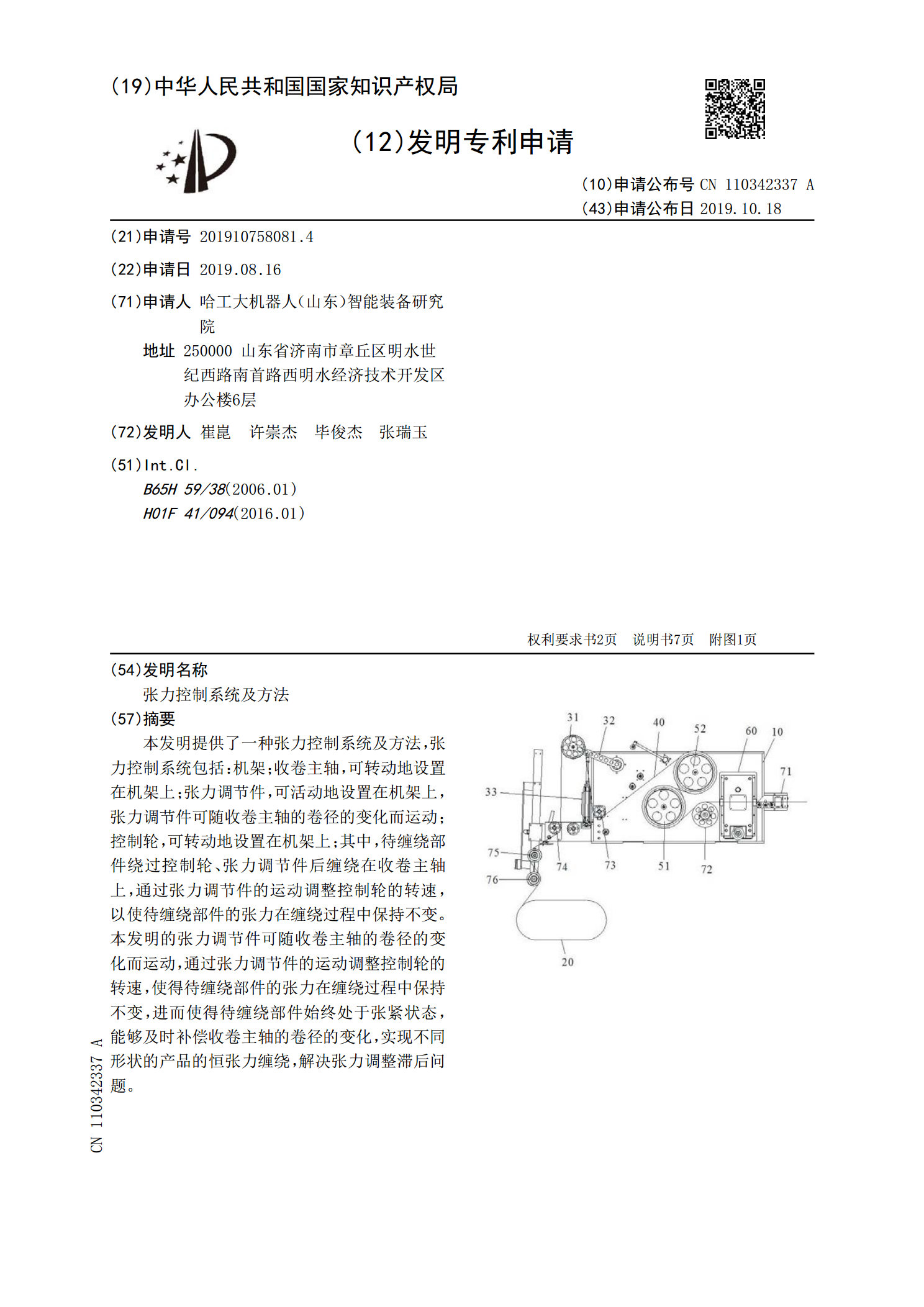
张力控制系统及方法.pdf
本发明提供了一种张力控制系统及方法,张力控制系统包括:机架;收卷主轴,可转动地设置在机架上;张力调节件,可活动地设置在机架上,张力调节件可随收卷主轴的卷径的变化而运动;控制轮,可转动地设置在机架上;其中,待缠绕部件绕过控制轮、张力调节件后缠绕在收卷主轴上,通过张力调节件的运动调整控制轮的转速,以使待缠绕部件的张力在缠绕过程中保持不变。本发明的张力调节件可随收卷主轴的卷径的变化而运动,通过张力调节件的运动调整控制轮的转速,使得待缠绕部件的张力在缠绕过程中保持不变,进而使得待缠绕部件始终处于张紧状态,能够及时

张力控制系统.pdf
本发明公开了一种张力控制系统,它包括主动辊、从动辊、张力调节装置,其特征是:在从薄膜某位置的张力传感器,到张力变送器,到卷绕专用变频器,到电机,再到主动辊,到一组从动辊,又到薄膜上该位置的张力传感器组成的闭环式全自动张力控制系统中,从薄膜的张力传感器,到张力变送器,到卷绕专用变频器,是通过信号线连接,卷绕专用变频器到电机是通过电缆线连接,电机直接连接主动辊,主动辊与从动辊之间为链轮连接。本发明采用变频卷绕控制传动技术,克服了旧式传动方式的缺陷和不足,生产线各位置的张力能直观显示,全线的整体张力可
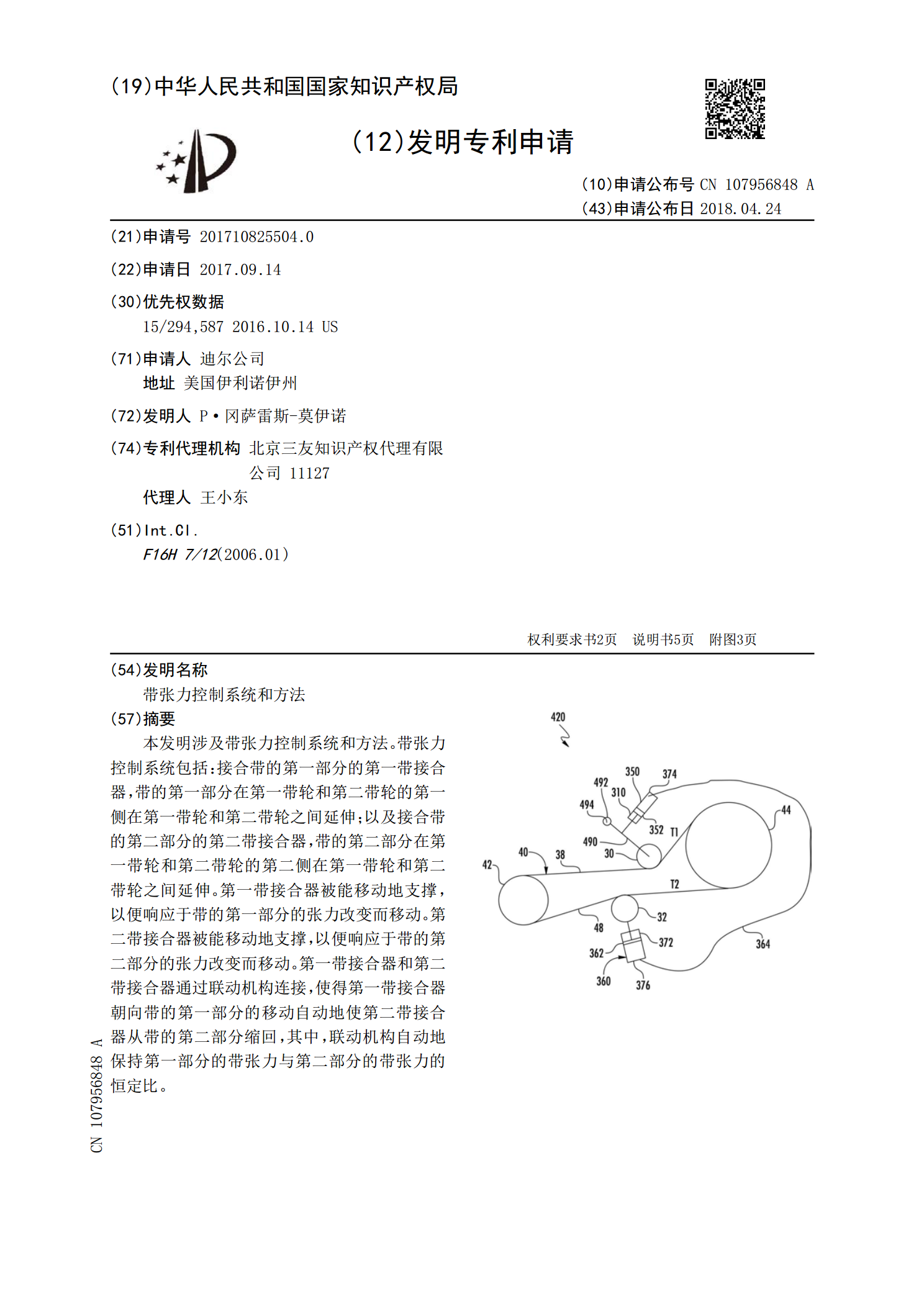
带张力控制系统和方法.pdf
本发明涉及带张力控制系统和方法。带张力控制系统包括:接合带的第一部分的第一带接合器,带的第一部分在第一带轮和第二带轮的第一侧在第一带轮和第二带轮之间延伸;以及接合带的第二部分的第二带接合器,带的第二部分在第一带轮和第二带轮的第二侧在第一带轮和第二带轮之间延伸。第一带接合器被能移动地支撑,以便响应于带的第一部分的张力改变而移动。第二带接合器被能移动地支撑,以便响应于带的第二部分的张力改变而移动。第一带接合器和第二带接合器通过联动机构连接,使得第一带接合器朝向带的第一部分的移动自动地使第二带接合器从带的第二部
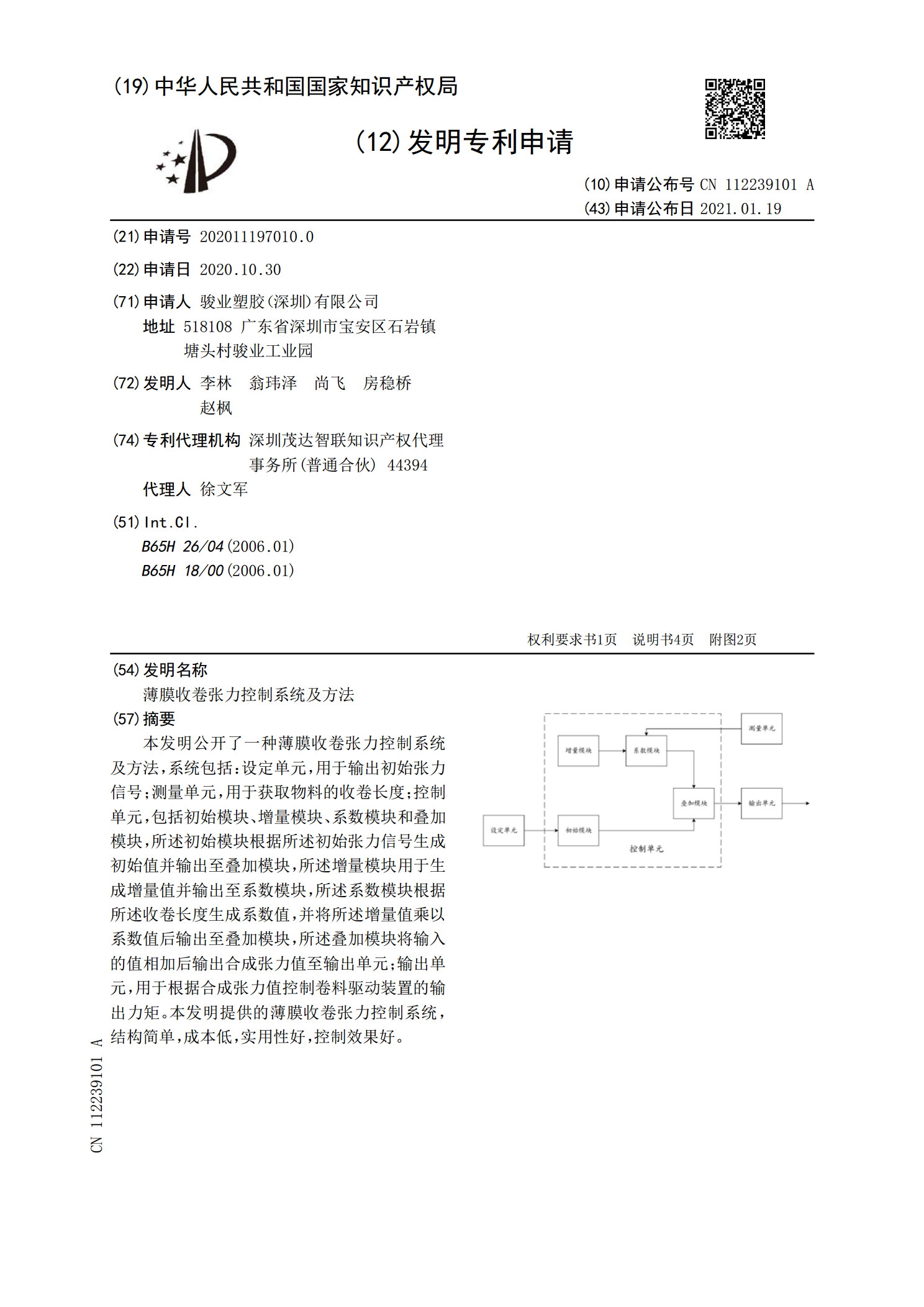
薄膜收卷张力控制系统及方法.pdf
本发明公开了一种薄膜收卷张力控制系统及方法,系统包括:设定单元,用于输出初始张力信号;测量单元,用于获取物料的收卷长度;控制单元,包括初始模块、增量模块、系数模块和叠加模块,所述初始模块根据所述初始张力信号生成初始值并输出至叠加模块,所述增量模块用于生成增量值并输出至系数模块,所述系数模块根据所述收卷长度生成系数值,并将所述增量值乘以系数值后输出至叠加模块,所述叠加模块将输入的值相加后输出合成张力值至输出单元;输出单元,用于根据合成张力值控制卷料驱动装置的输出力矩。本发明提供的薄膜收卷张力控制系统,结构简