
利用对接装置实现水中悬浮隧道水下对接的方法.pdf

一条****淑淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

利用对接装置实现水中悬浮隧道水下对接的方法.pdf
本发明公开了一种利用对接装置实现水中悬浮隧道水下对接的方法,其特征是:设置一呈圆筒状的钢架,以其后半段套装并支撑在上节管上,在钢架的前半段的内侧壁上、处在不同的轴向位置上设置各道环绕钢轨和相贯通的轴向钢轨;多个可伸缩机械臂利用可旋转的滚轮支撑在轴向钢轨上,并能够在轴向钢轨及环绕钢轨中移动,利用成对设置的可伸缩机械臂对于下节管形成夹持;在对接管的外侧壁上沿轴向设置临时轨道,辊轮是支撑在临时轨道中,使对接管与钢架处在同轴位置上并能够相对轴向移动。本发明以半自动化的形式实现了水中悬浮隧道水下准确对接。

一种水中悬浮隧道水下对接装置及其应用.pdf
本发明公开了一种水中悬浮隧道水下对接装置及其应用,其特征是:设置一呈圆筒状的钢架,以其后半段套装并支撑在上节管上,在钢架的前半段的内侧壁上、处在不同的轴向位置上设置各道环绕钢轨和相贯通的轴向钢轨;多个可伸缩机械臂利用可旋转的滚轮支撑在轴向钢轨上,并能够在轴向钢轨及环绕钢轨中移动,利用成对设置的可伸缩机械臂对于下节管形成夹持;在对接管的外侧壁上沿轴向设置临时轨道,辊轮是支撑在临时轨道中,使对接管与钢架处在同轴位置上并能够相对轴向移动。本发明以半自动化的形式实现了水中悬浮隧道水下准确对接。
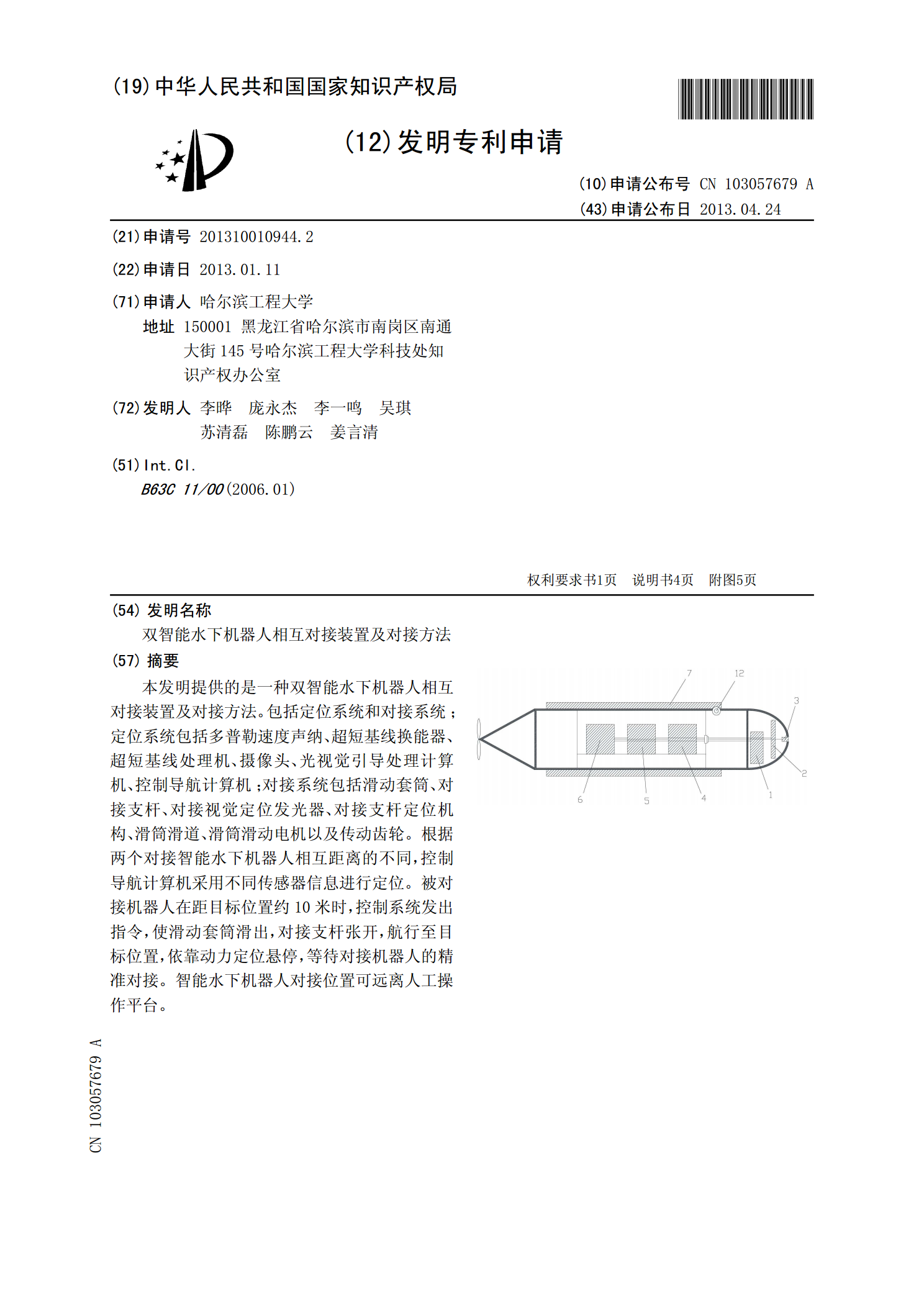
双智能水下机器人相互对接装置及对接方法.pdf
本发明提供的是一种双智能水下机器人相互对接装置及对接方法。包括定位系统和对接系统;定位系统包括多普勒速度声纳、超短基线换能器、超短基线处理机、摄像头、光视觉引导处理计算机、控制导航计算机;对接系统包括滑动套筒、对接支杆、对接视觉定位发光器、对接支杆定位机构、滑筒滑道、滑筒滑动电机以及传动齿轮。根据两个对接智能水下机器人相互距离的不同,控制导航计算机采用不同传感器信息进行定位。被对接机器人在距目标位置约10米时,控制系统发出指令,使滑动套筒滑出,对接支杆张开,航行至目标位置,依靠动力定位悬停,等待对接机器人

一种AUV水下布放与回收对接装置和对接方法.pdf
本发明公开了一种AUV水下布放与回收对接装置和对接方法,属于无缆水下机器人技术领域。由主体支撑结构,导引灯阵,夹紧装置和限位固定装置组成。导引灯阵由两个大灯和两个小灯组成,大灯安装在主体支撑结构两端,小灯安装在主体支撑结构中间部分。夹紧装置位于主体支撑结构两端的内部,夹紧臂与连杆铰接,连杆与摆动杆铰接,摆动杆固定在电机轴上。限位固定装置由半圆柱翻盖,电磁铁,传动齿轮和电机组成。半圆柱翻盖安装在主体支撑结构中部下方,电磁铁安装在半圆柱翻盖中部边上,半圆柱翻盖两端为不完全齿轮结构,与传动齿轮相啮合,传动齿轮固
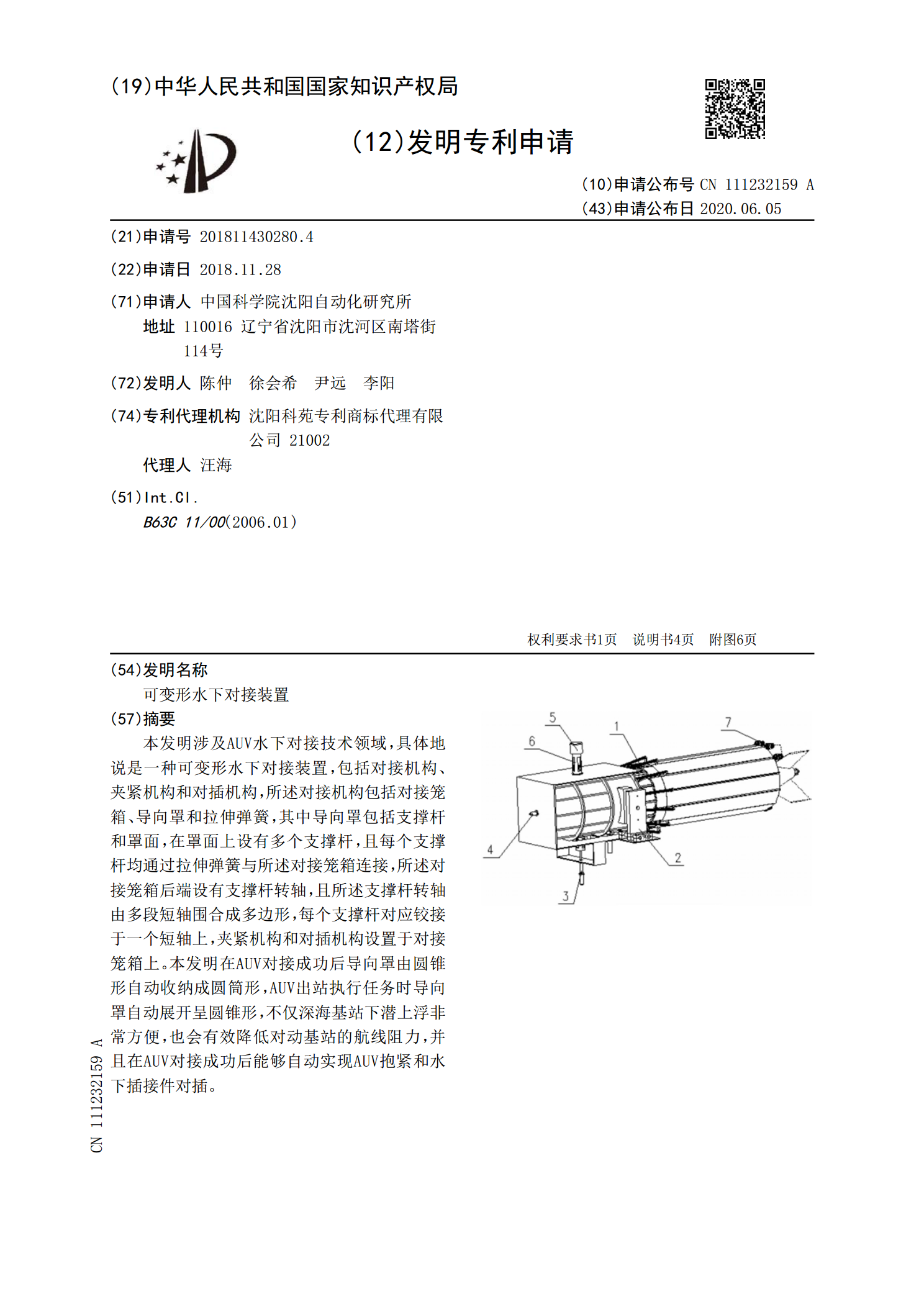
可变形水下对接装置.pdf
本发明涉及AUV水下对接技术领域,具体地说是一种可变形水下对接装置,包括对接机构、夹紧机构和对插机构,所述对接机构包括对接笼箱、导向罩和拉伸弹簧,其中导向罩包括支撑杆和罩面,在罩面上设有多个支撑杆,且每个支撑杆均通过拉伸弹簧与所述对接笼箱连接,所述对接笼箱后端设有支撑杆转轴,且所述支撑杆转轴由多段短轴围合成多边形,每个支撑杆对应铰接于一个短轴上,夹紧机构和对插机构设置于对接笼箱上。本发明在AUV对接成功后导向罩由圆锥形自动收纳成圆筒形,AUV出站执行任务时导向罩自动展开呈圆锥形,不仅深海基站下潜上浮非常方