
一种AUV水下布放与回收对接装置和对接方法.pdf

闪闪****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种AUV水下布放与回收对接装置和对接方法.pdf
本发明公开了一种AUV水下布放与回收对接装置和对接方法,属于无缆水下机器人技术领域。由主体支撑结构,导引灯阵,夹紧装置和限位固定装置组成。导引灯阵由两个大灯和两个小灯组成,大灯安装在主体支撑结构两端,小灯安装在主体支撑结构中间部分。夹紧装置位于主体支撑结构两端的内部,夹紧臂与连杆铰接,连杆与摆动杆铰接,摆动杆固定在电机轴上。限位固定装置由半圆柱翻盖,电磁铁,传动齿轮和电机组成。半圆柱翻盖安装在主体支撑结构中部下方,电磁铁安装在半圆柱翻盖中部边上,半圆柱翻盖两端为不完全齿轮结构,与传动齿轮相啮合,传动齿轮固

一种水下探测设备的布放与回收装置及其布放、回收方法.pdf
本发明公开了一种水下探测设备的布放与回收装置,该回收装置设置于舰船上,对于第二悬臂吊:其吊臂前端安装定滑轮、其吊臂两端分别设置处于同一直线上的第一耳环和第二耳环、其吊臂后端设置与第二耳环成直角夹角的第三耳环、其基座上设置定滑轮组;牵引索从第一绞车上发出,通过定滑轮组绕至吊臂前端的定滑轮,再经第二悬臂吊的基座上的定滑轮组收回到第二绞车上;第一浮球通过绳索穿过第一、第三耳环固定于船上,第二浮球通过绳索穿过第二耳环固定在船上;捕获设备连接至第一悬臂吊前端的吊放钩。本发明还提供了基于该装置的布放、回收方法,通过该

AUV水下对接智能归航方法研究的开题报告.docx
AUV水下对接智能归航方法研究的开题报告一、选题背景自动水下车辆(AUV)作为一种新型无人机,具有自主控制、远程操作、灵活适应、载荷广泛等特点,已经广泛应用于海洋科学调查、油气田勘探、水下结构物检测等领域。在实际应用过程中,AUV需要完成多种任务,如水下勘探、地形绘制、目标跟踪等。其中,水下对接被认为是一项重要的任务,可以用于亚洲深海资源的开发、海底管道的维护、水下科考等领域。但由于海洋环境的改变、AUV的工作特殊性质,使得AUV水下对接面临的技术难点较多。笔者在此选择AUV水下对接智能归航方法的研究,旨
一种AUV动态对接装置.pdf
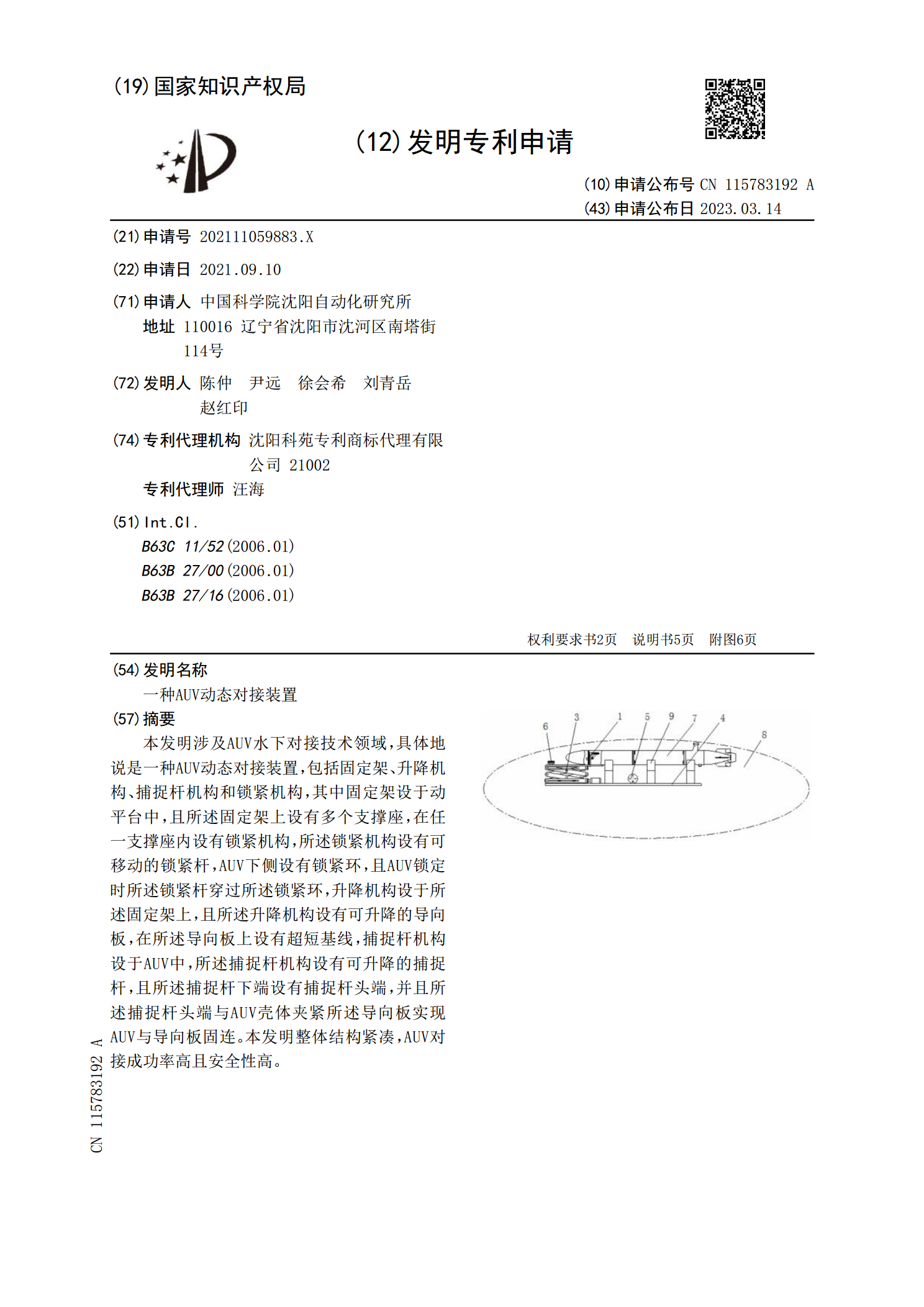
本发明涉及AUV水下对接技术领域,具体地说是一种AUV动态对接装置,包括固定架、升降机构、捕捉杆机构和锁紧机构,其中固定架设于动平台中,且所述固定架上设有多个支撑座,在任一支撑座内设有锁紧机构,所述锁紧机构设有可移动的锁紧杆,AUV下侧设有锁紧环,且AUV锁定时所述锁紧杆穿过所述锁紧环,升降机构设于所述固定架上,且所述升降机构设有可升降的导向板,在所述导向板上设有超短基线,捕捉杆机构设于AUV中,所述捕捉杆机构设有可升降的捕捉杆,且所述捕捉杆下端设有捕捉杆头端,并且所述捕捉杆头端与AUV壳体夹紧所述导向板

AUV水下对接定位技术研究.docx
AUV水下对接定位技术研究摘要无人潜水器(AUV)在水下勘探,海底地形测绘和油气管道巡检等方面具有广泛的应用前景,而对接定位技术则是保证AUV任务完成的关键。在本论文中,我们介绍了AUV水下对接定位技术的研究现状和发展趋势。首先,我们探讨了AUV对接技术的基本概念、应用领域和技术要求。接着,我们综述了三种常用的对接定位技术,即全球定位系统(GPS)技术、声纳测距技术和惯性导航技术。最后,我们给出了AUV对接定位技术的研究展望和存在的问题。关键词:AUV;对接技术;定位技术;GPS;声纳测距;惯性导航1.简