
管道内壁清洁方法.pdf

玉怡****文档

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
管道内壁清洁方法.pdf
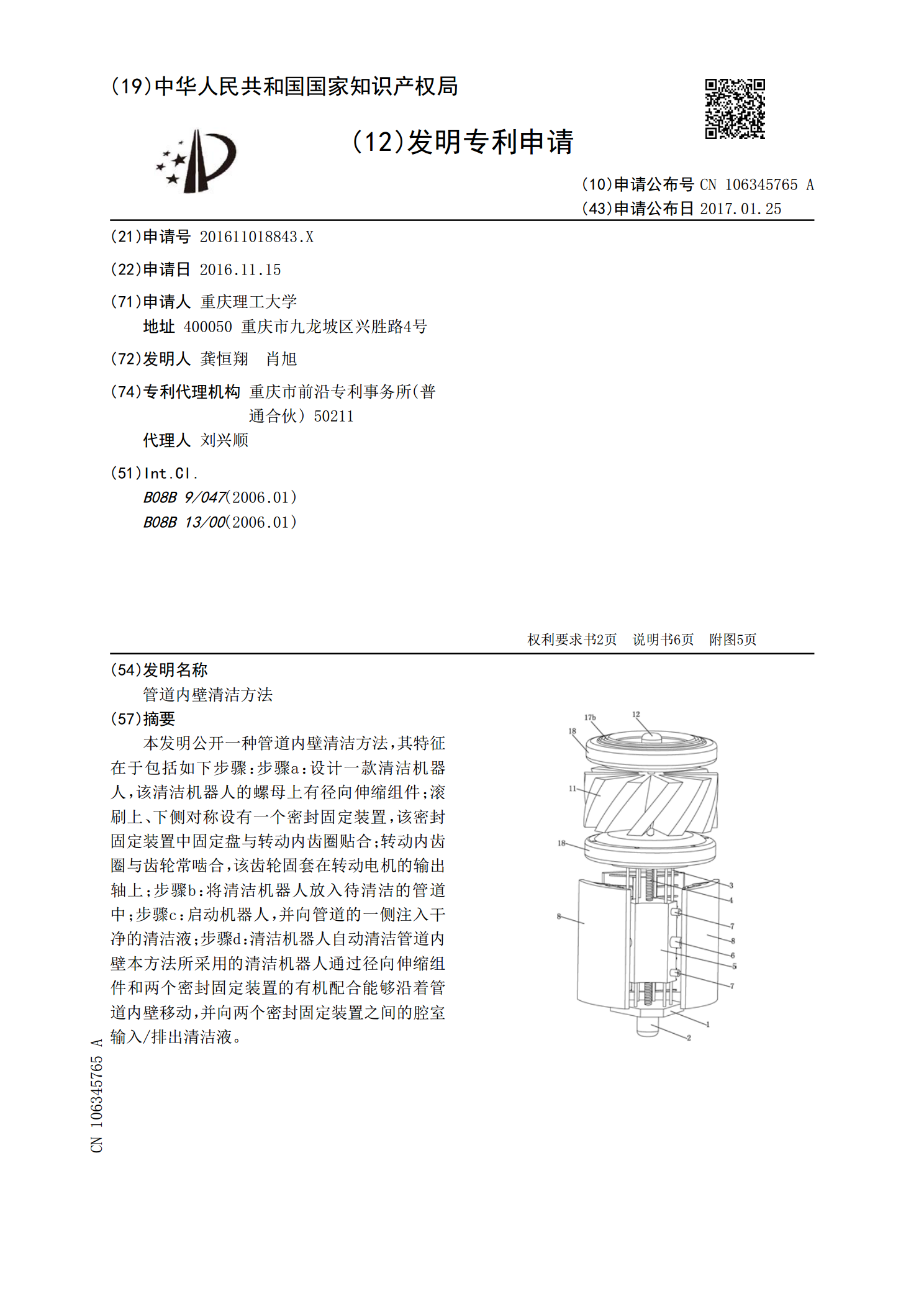
本发明公开一种管道内壁清洁方法,其特征在于包括如下步骤:步骤a:设计一款清洁机器人,该清洁机器人的螺母上有径向伸缩组件;滚刷上、下侧对称设有一个密封固定装置,该密封固定装置中固定盘与转动内齿圈贴合;转动内齿圈与齿轮常啮合,该齿轮固套在转动电机的输出轴上;步骤b:将清洁机器人放入待清洁的管道中;步骤c:启动机器人,并向管道的一侧注入干净的清洁液;步骤d:清洁机器人自动清洁管道内壁本方法所采用的清洁机器人通过径向伸缩组件和两个密封固定装置的有机配合能够沿着管道内壁移动,并向两个密封固定装置之间的腔室输入/排出

管道内壁清洁机器人.pdf
本发明提供一种管道内壁清洁机器人,包括主流管和拨片,所述主流管的外侧中间设置有固定环,且固定环的四周均与活动杆的前端相连接,所述主流管的后端外壁四周均设置有第一弹簧,且第一弹簧的远离主流管中心点的一端均设置有顶杆,所述顶杆均与滑槽相连接,且滑槽开设在顶杆后端,所述顶杆的后端均设置有滑轮,所述主流管的前端与固定盘的后端相连接,且固定盘的前侧开设有射流孔,所述固定盘的外侧通过支撑杆与转盘相连接,且固定盘上开设有内槽,所述内槽内均设置有第二弹簧。本发明提供的自走式石油管道内部清洗装置具有结构简单,且便于在封闭的
管道内壁清洁机器人.pdf
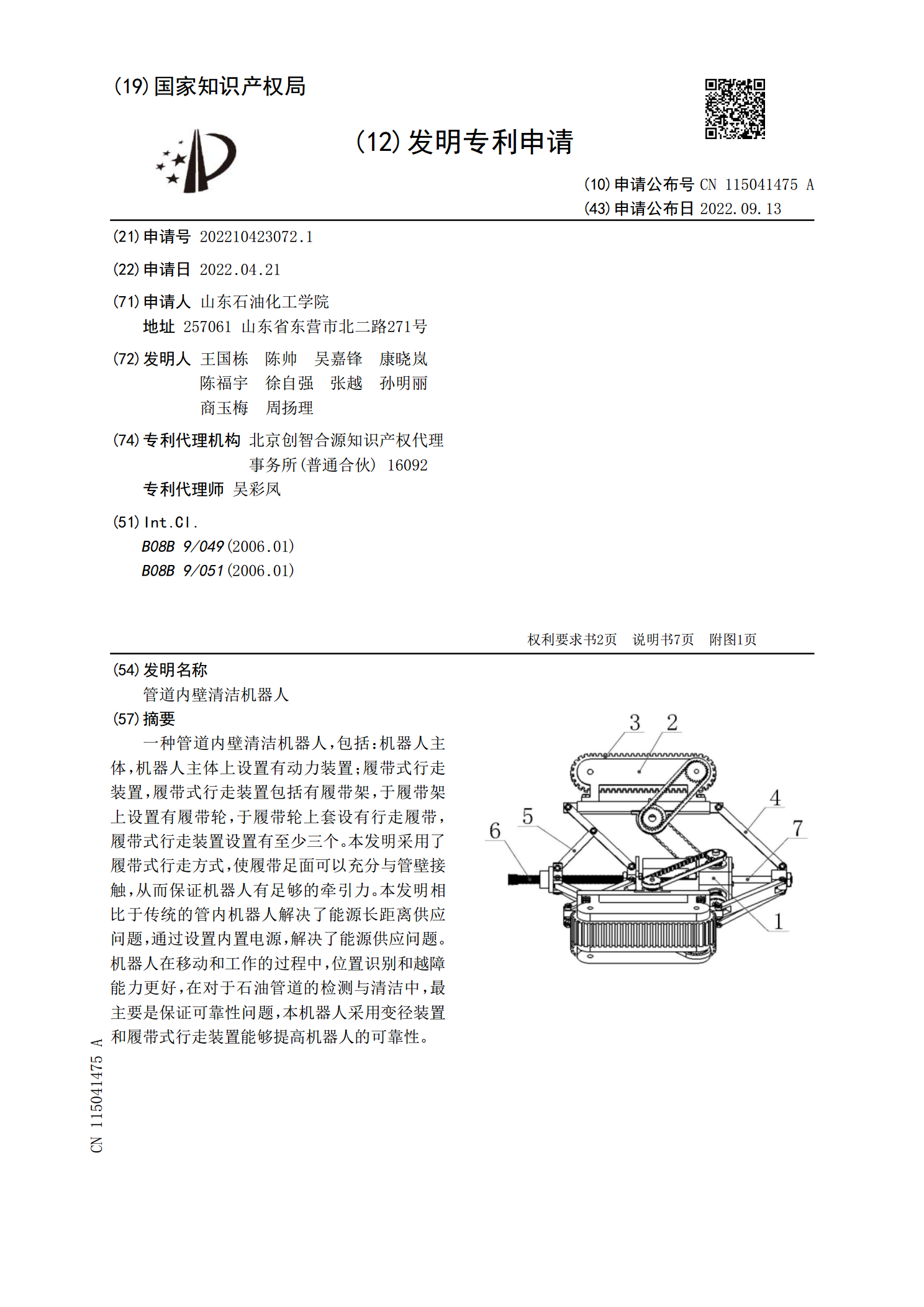
一种管道内壁清洁机器人,包括:机器人主体,机器人主体上设置有动力装置;履带式行走装置,履带式行走装置包括有履带架,于履带架上设置有履带轮,于履带轮上套设有行走履带,履带式行走装置设置有至少三个。本发明采用了履带式行走方式,使履带足面可以充分与管壁接触,从而保证机器人有足够的牵引力。本发明相比于传统的管内机器人解决了能源长距离供应问题,通过设置内置电源,解决了能源供应问题。机器人在移动和工作的过程中,位置识别和越障能力更好,在对于石油管道的检测与清洁中,最主要是保证可靠性问题,本机器人采用变径装置和履带式行
便携式管道内壁电动清洁装置.pdf
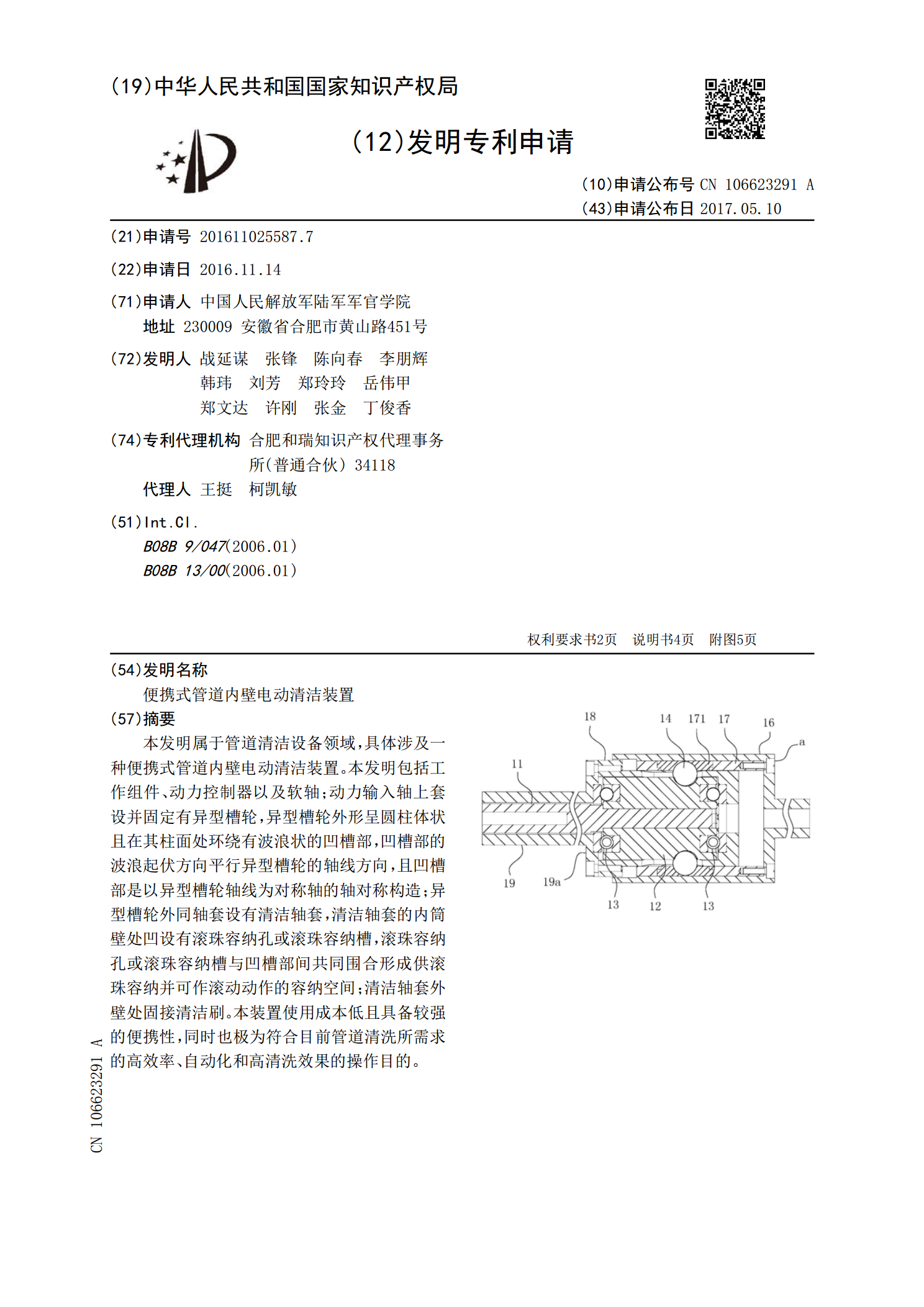
本发明属于管道清洁设备领域,具体涉及一种便携式管道内壁电动清洁装置。本发明包括工作组件、动力控制器以及软轴;动力输入轴上套设并固定有异型槽轮,异型槽轮外形呈圆柱体状且在其柱面处环绕有波浪状的凹槽部,凹槽部的波浪起伏方向平行异型槽轮的轴线方向,且凹槽部是以异型槽轮轴线为对称轴的轴对称构造;异型槽轮外同轴套设有清洁轴套,清洁轴套的内筒壁处凹设有滚珠容纳孔或滚珠容纳槽,滚珠容纳孔或滚珠容纳槽与凹槽部间共同围合形成供滚珠容纳并可作滚动动作的容纳空间;清洁轴套外壁处固接清洁刷。本装置使用成本低且具备较强的便携性,同
用于自清洁管道内壁的涂覆剂及其自清洁管道.pdf
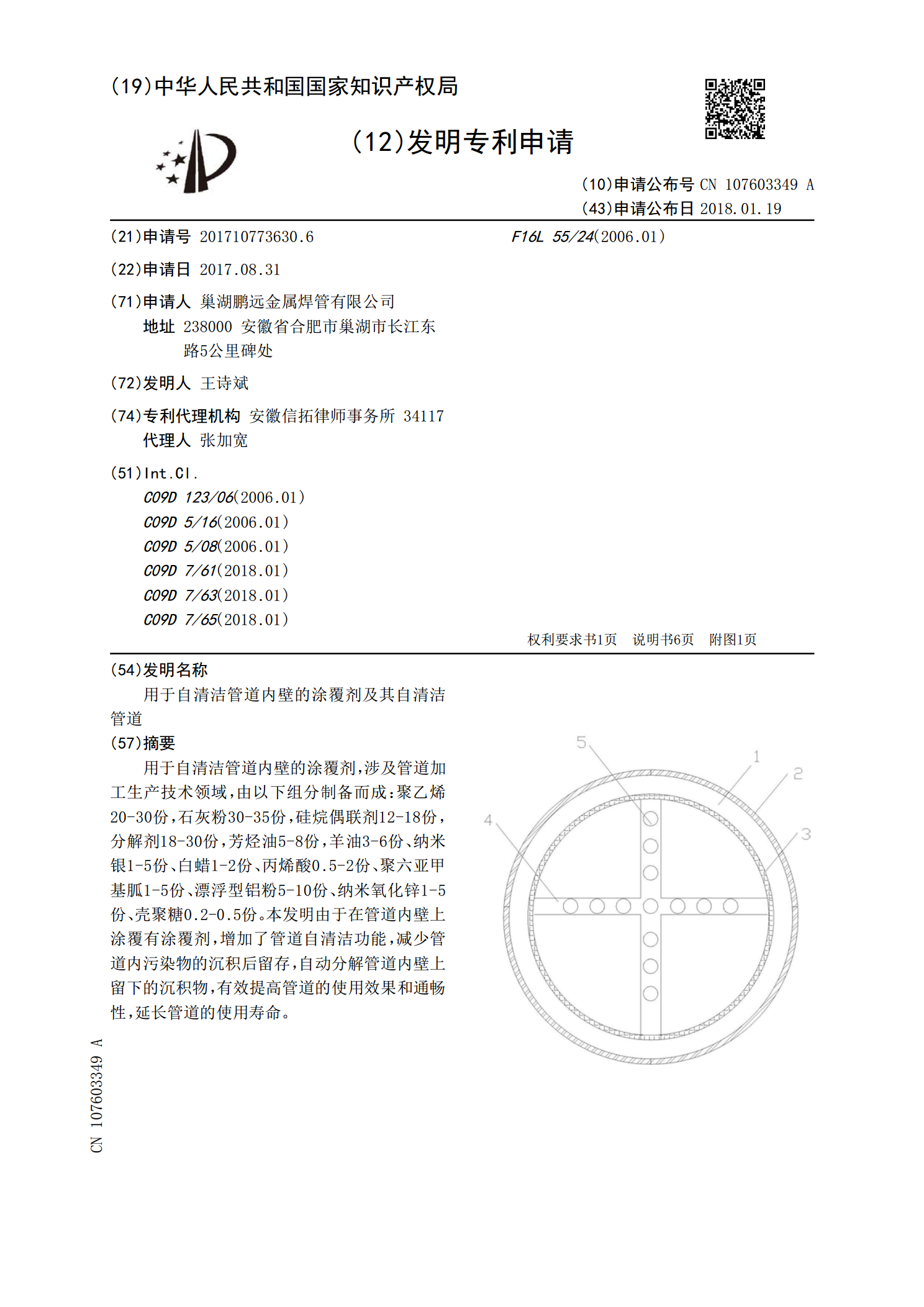
用于自清洁管道内壁的涂覆剂,涉及管道加工生产技术领域,由以下组分制备而成:聚乙烯20‑30份,石灰粉30‑35份,硅烷偶联剂12‑18份,分解剂18‑30份,芳烃油5‑8份,羊油3‑6份、纳米银1‑5份、白蜡1‑2份、丙烯酸0.5‑2份、聚六亚甲基胍1‑5份、漂浮型铝粉5‑10份、纳米氧化锌1‑5份、壳聚糖0.2‑0.5份。本发明由于在管道内壁上涂覆有涂覆剂,增加了管道自清洁功能,减少管道内污染物的沉积后留存,自动分解管道内壁上留下的沉积物,有效提高管道的使用效果和通畅性,延长管道的使用寿命。