
一种人机共驾型电动助力转向系统及模式切换方法.pdf

文阁****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种人机共驾型电动助力转向系统及模式切换方法.pdf
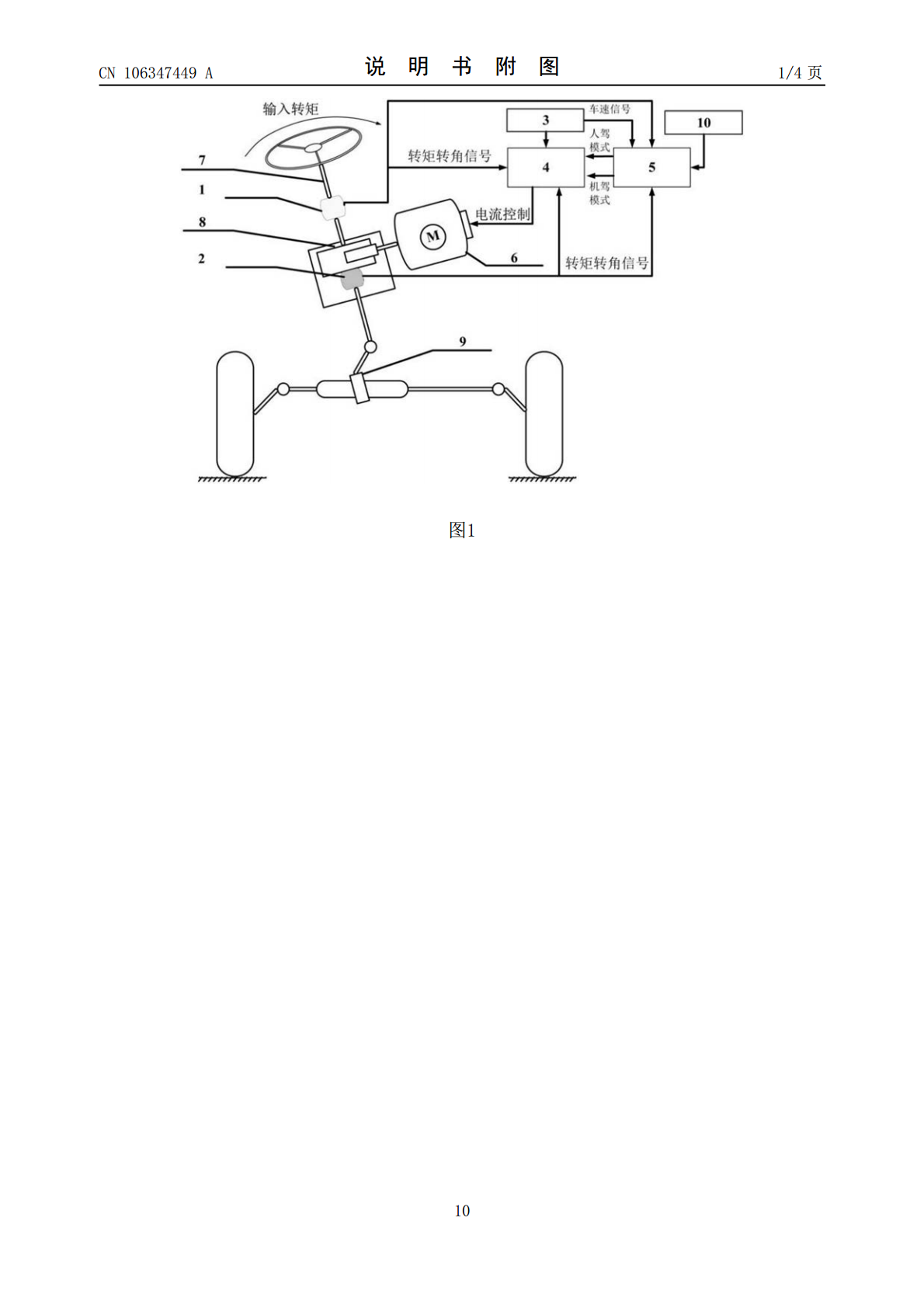
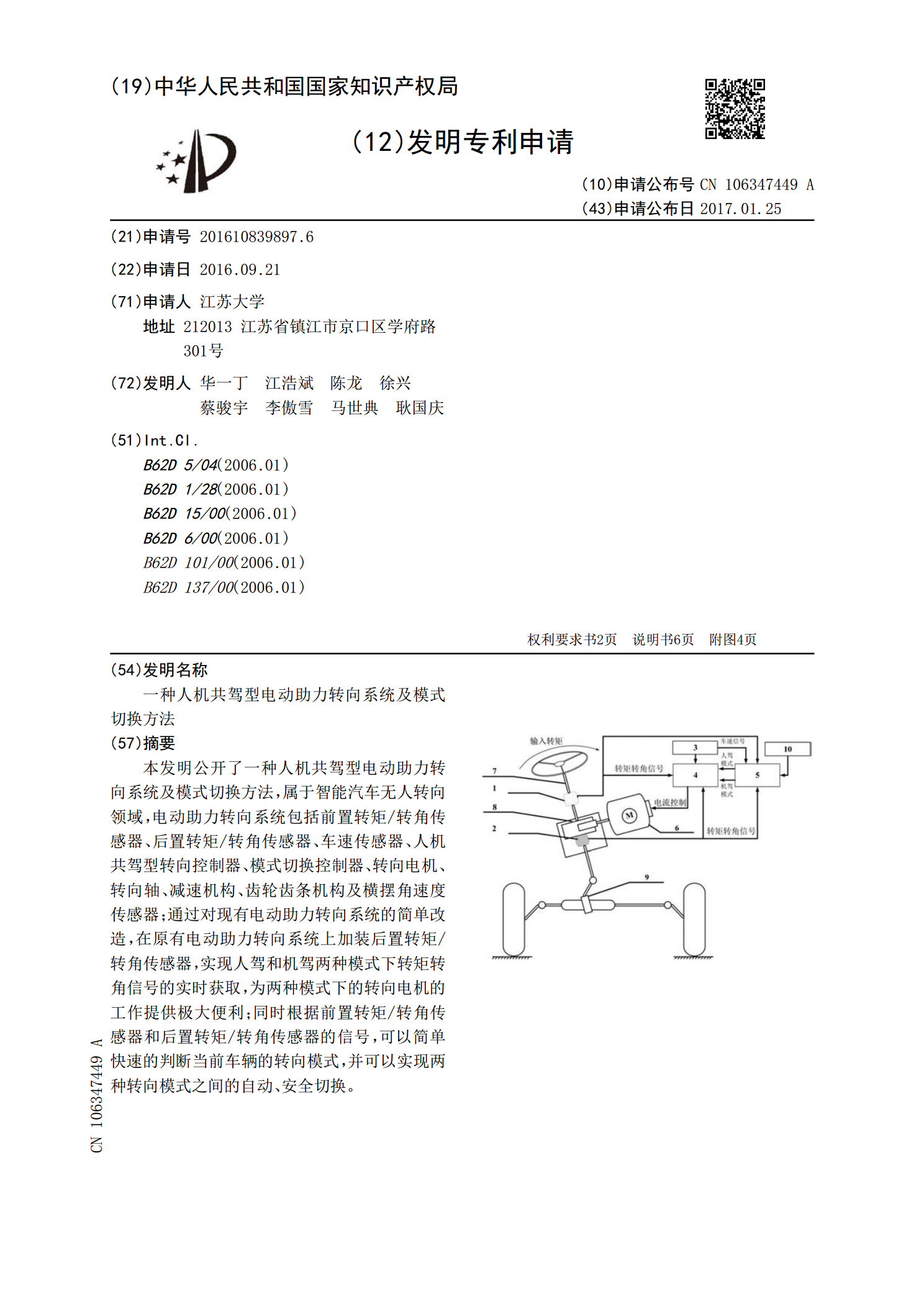
本发明公开了一种人机共驾型电动助力转向系统及模式切换方法,属于智能汽车无人转向领域,电动助力转向系统包括前置转矩/转角传感器、后置转矩/转角传感器、车速传感器、人机共驾型转向控制器、模式切换控制器、转向电机、转向轴、减速机构、齿轮齿条机构及横摆角速度传感器;通过对现有电动助力转向系统的简单改造,在原有电动助力转向系统上加装后置转矩/转角传感器,实现人驾和机驾两种模式下转矩转角信号的实时获取,为两种模式下的转向电机的工作提供极大便利;同时根据前置转矩/转角传感器和后置转矩/转角传感器的信号,可以简单快速的判
一种基于混杂理论的人机共驾型电动助力转向系统及控制方法.pdf
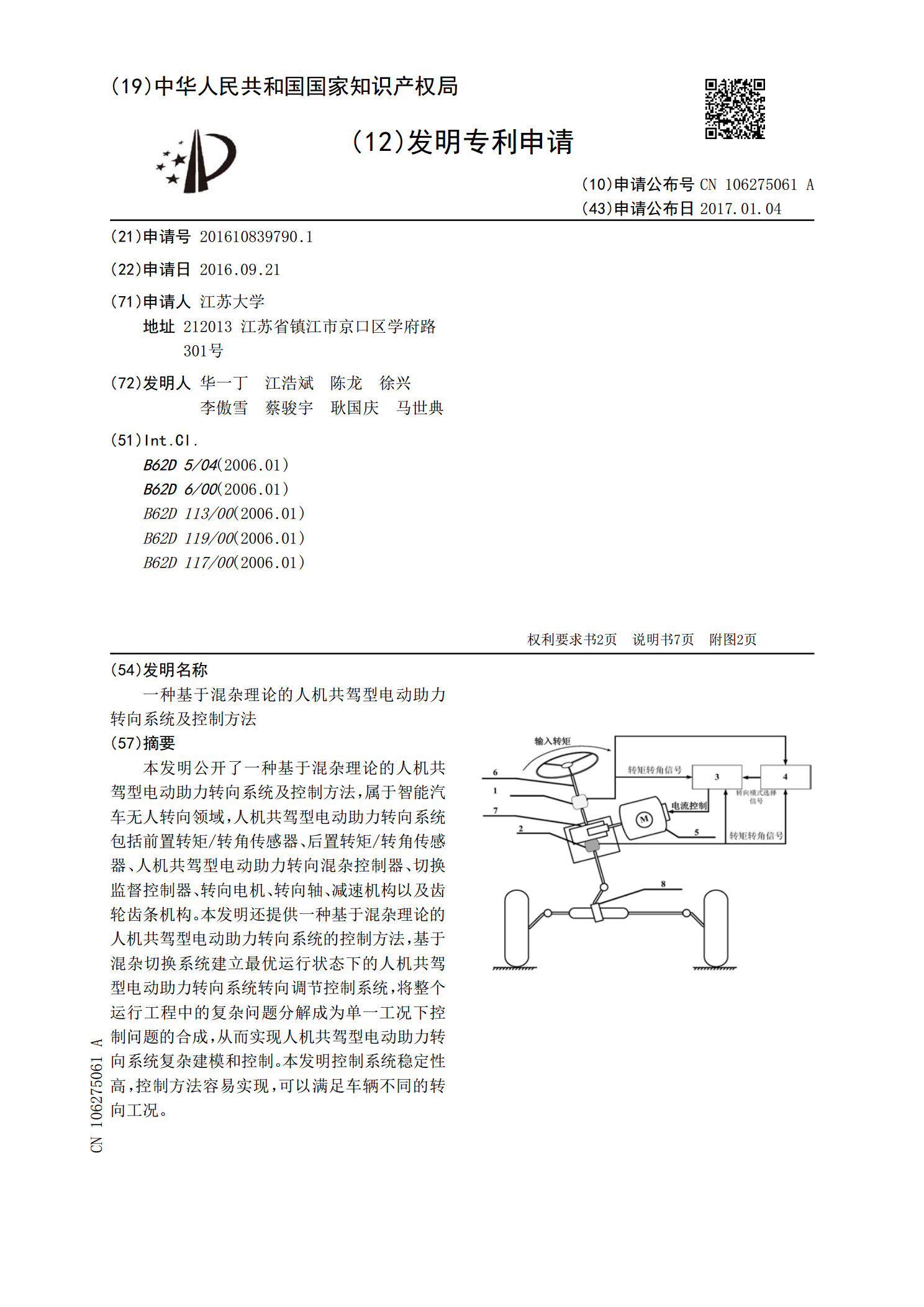
本发明公开了一种基于混杂理论的人机共驾型电动助力转向系统及控制方法,属于智能汽车无人转向领域,人机共驾型电动助力转向系统包括前置转矩/转角传感器、后置转矩/转角传感器、人机共驾型电动助力转向混杂控制器、切换监督控制器、转向电机、转向轴、减速机构以及齿轮齿条机构。本发明还提供一种基于混杂理论的人机共驾型电动助力转向系统的控制方法,基于混杂切换系统建立最优运行状态下的人机共驾型电动助力转向系统转向调节控制系统,将整个运行工程中的复杂问题分解成为单一工况下控制问题的合成,从而实现人机共驾型电动助力转向系统复杂建
电动助力转向系统的驾驶模式切换控制方法.pdf
本发明公开了一种电动助力转向系统的驾驶模式切换控制方法,不同驾驶模式下,具有不同的方向盘手感,它是通过存储在标定数据中的助力曲线决定的;该系统初始化阶段对ECU进行初始配置和上电诊断,然后进入助力控制轮循阶段;在助力控制轮循阶段,所述助力控制模块实时检测整车网络指令,根据整车驾驶模式切换指令进行驾驶模式切换,并选取切换后驾驶模式对应的标定变量实现不同的手感;在预定驾驶模式下,所述助力控制模块按一定周期轮循检测外部输入信号,根据各信号状态实时调整力矩指令的大小。本发明通过切换不同驾驶模式的助力特性,使汽车适
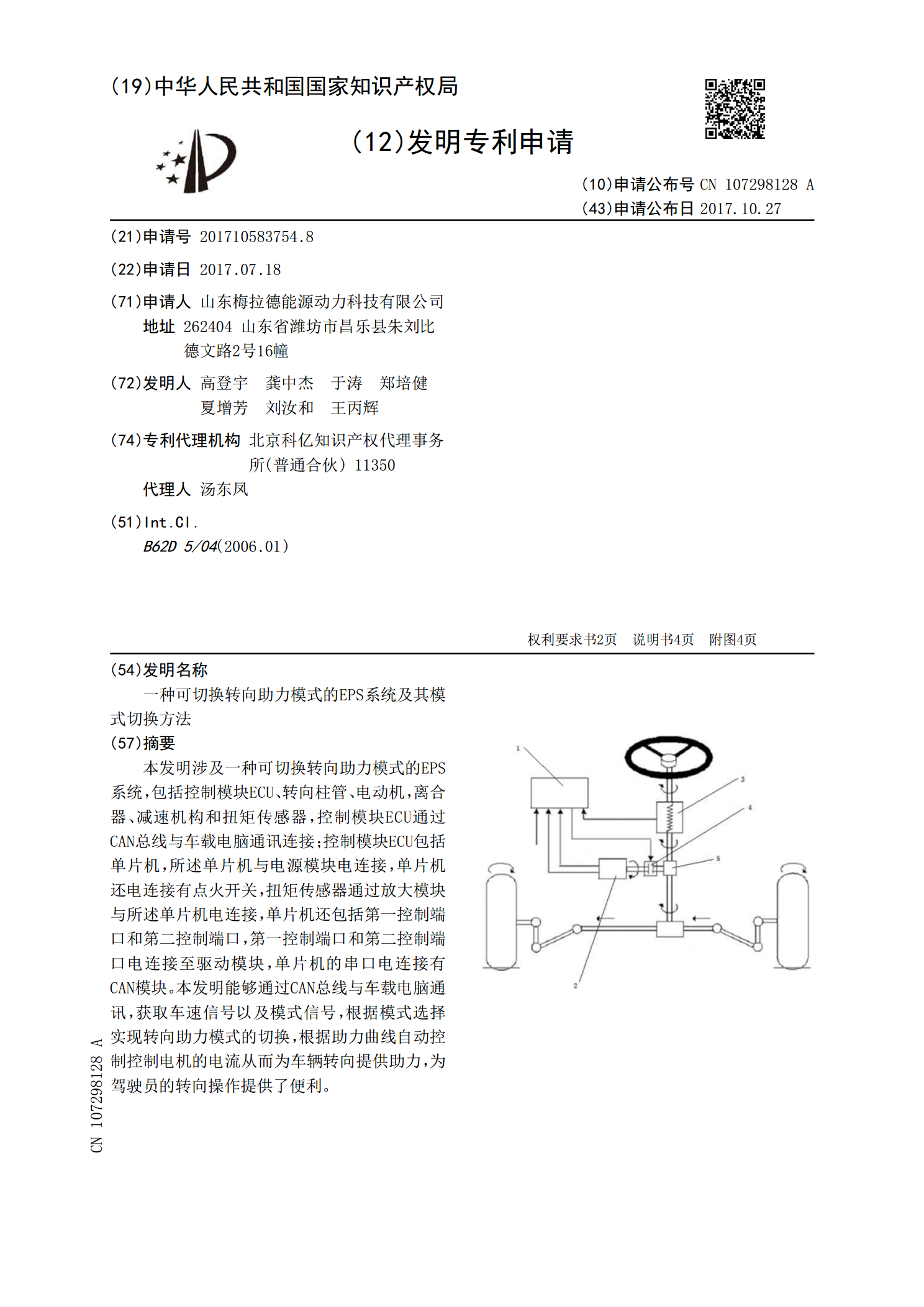
一种可切换转向助力模式的EPS系统及其模式切换方法.pdf
本发明涉及一种可切换转向助力模式的EPS系统,包括控制模块ECU、转向柱管、电动机,离合器、减速机构和扭矩传感器,控制模块ECU通过CAN总线与车载电脑通讯连接;控制模块ECU包括单片机,所述单片机与电源模块电连接,单片机还电连接有点火开关,扭矩传感器通过放大模块与所述单片机电连接,单片机还包括第一控制端口和第二控制端口,第一控制端口和第二控制端口电连接至驱动模块,单片机的串口电连接有CAN模块。本发明能够通过CAN总线与车载电脑通讯,获取车速信号以及模式信号,根据模式选择实现转向助力模式的切换,根据助力
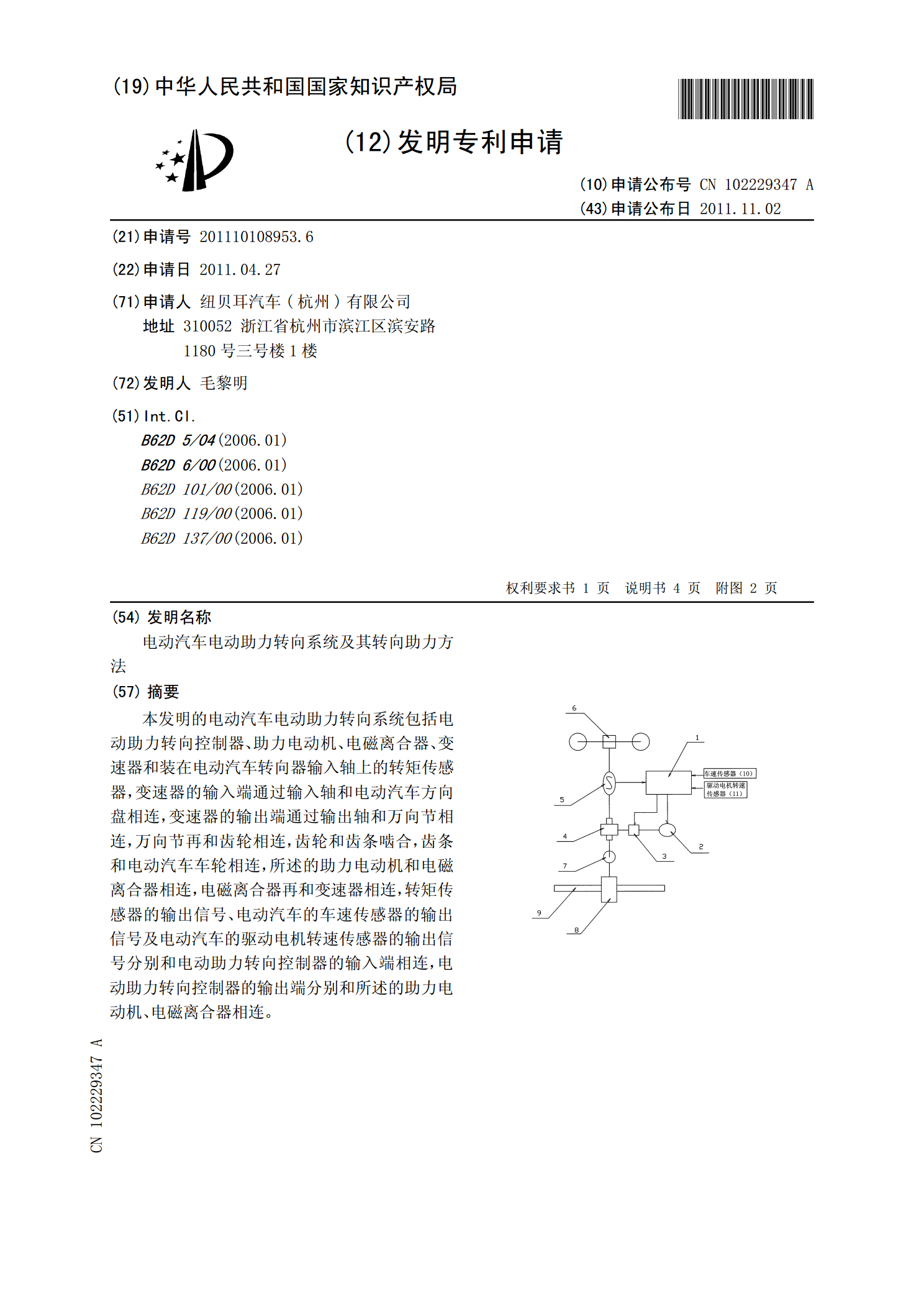
电动汽车电动助力转向系统及其转向助力方法.pdf
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机