
一种丝杠拨叉式机电伺服机构.pdf

书生****12


1/8
2/8

3/8
4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种丝杠拨叉式机电伺服机构.pdf
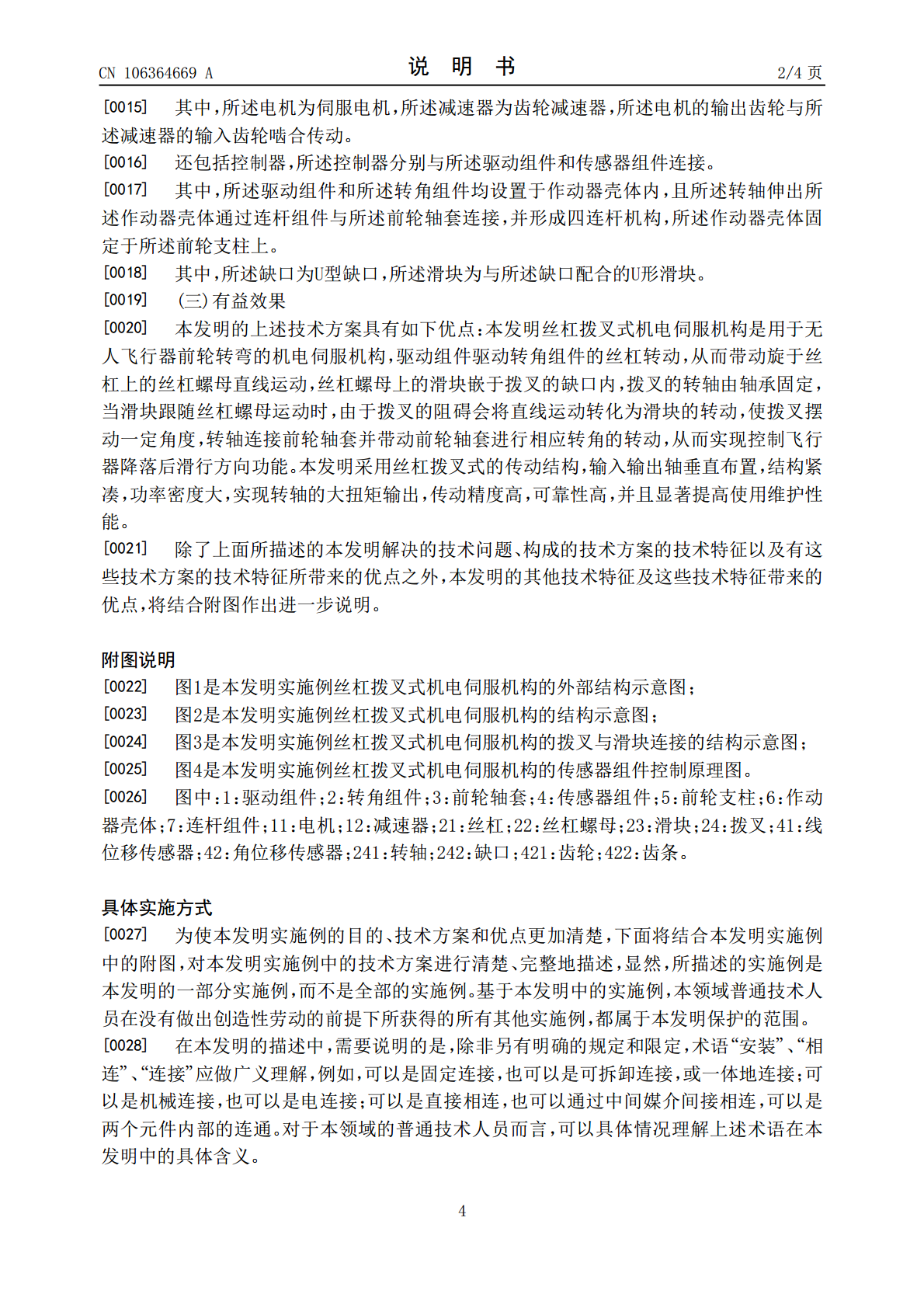
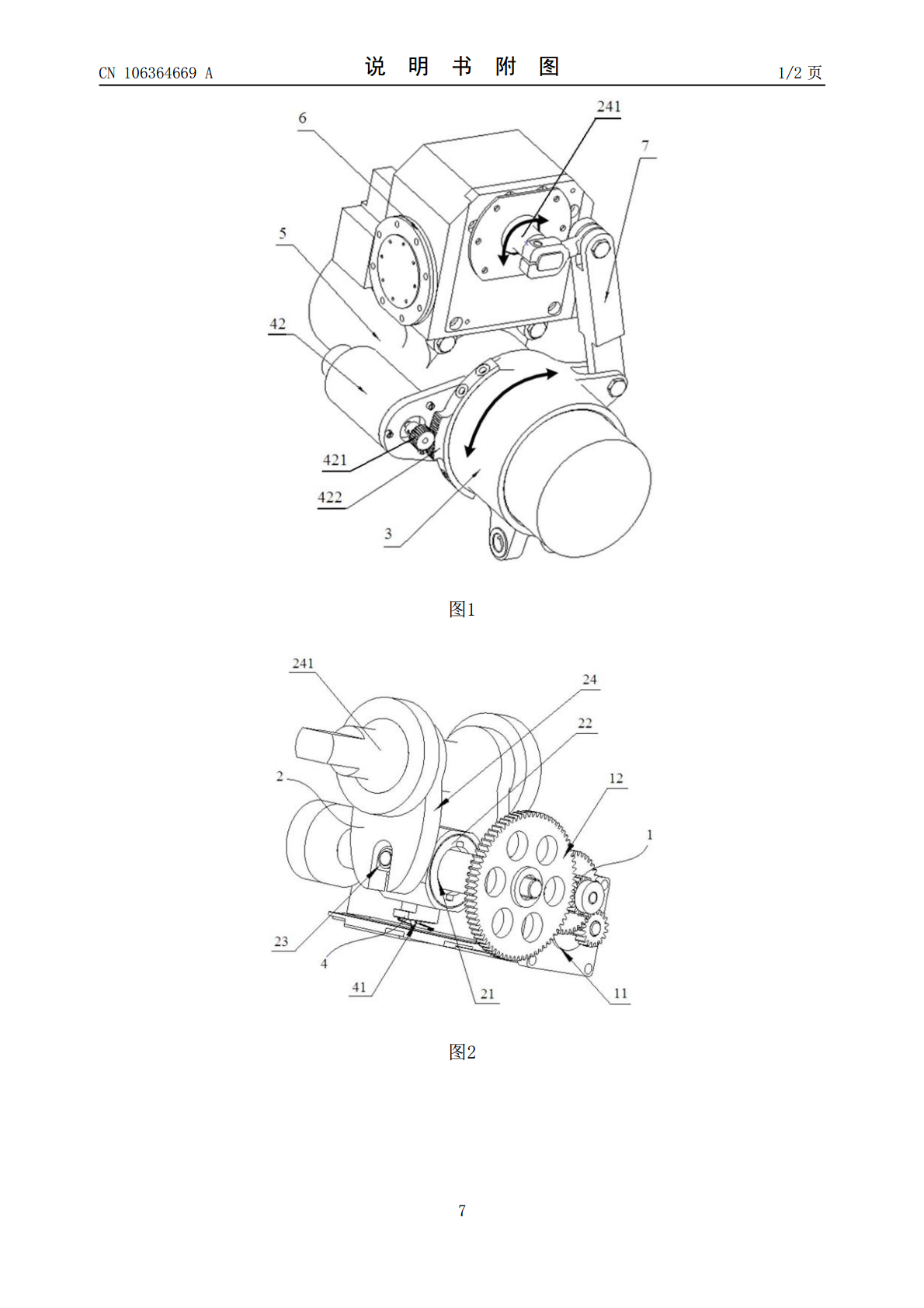
本发明涉及飞行器前轮转弯技术领域,尤其涉及一种丝杠拨叉式机电伺服机构,包括驱动组件和转角组件,转角组件包括丝杠、丝杠螺母、滑块和拨叉,丝杠与驱动组件连接,丝杠螺母套设于丝杠上,滑块设置于丝杠螺母的外壁上,且与丝杠螺母可转动连接,拨叉的一端设有转轴,转轴的轴线与拨叉和丝杠的轴线均垂直,且转轴与前轮轴套连接,拨叉的另一端具有缺口,滑块嵌于缺口中,以将丝杠螺母的直线运动转化为拨叉的转动,从而带动前轮轴套转动。本发明驱动组件驱动转角组件的丝杠转动,从而带动旋于丝杠上的丝杠螺母直线运动,丝杠螺母上的滑块嵌于拨叉的缺

一种串行式双丝杠余度控制机电伺服机构.pdf
本发明涉及一种串行式双丝杠余度控制机电伺服机构,采用一种RVI行星滚柱丝杠副和一种RV行星滚柱丝杠副串行式同轴布置,两种丝杠副共用一根丝杆轴,并且设置相同承载能力和结构参数螺纹,通过同一中空结构伺服电机驱动两种丝杠副在RVI丝杠传动发生故障时切换至RV丝杠进行替代工作,利用电机旋转传感器和机构直线位移监测传感器对传动故障进行综合判断,从而实现两种丝杠副在静连接承载和动啮合承载的转换,实现EMA传动冗余备份。
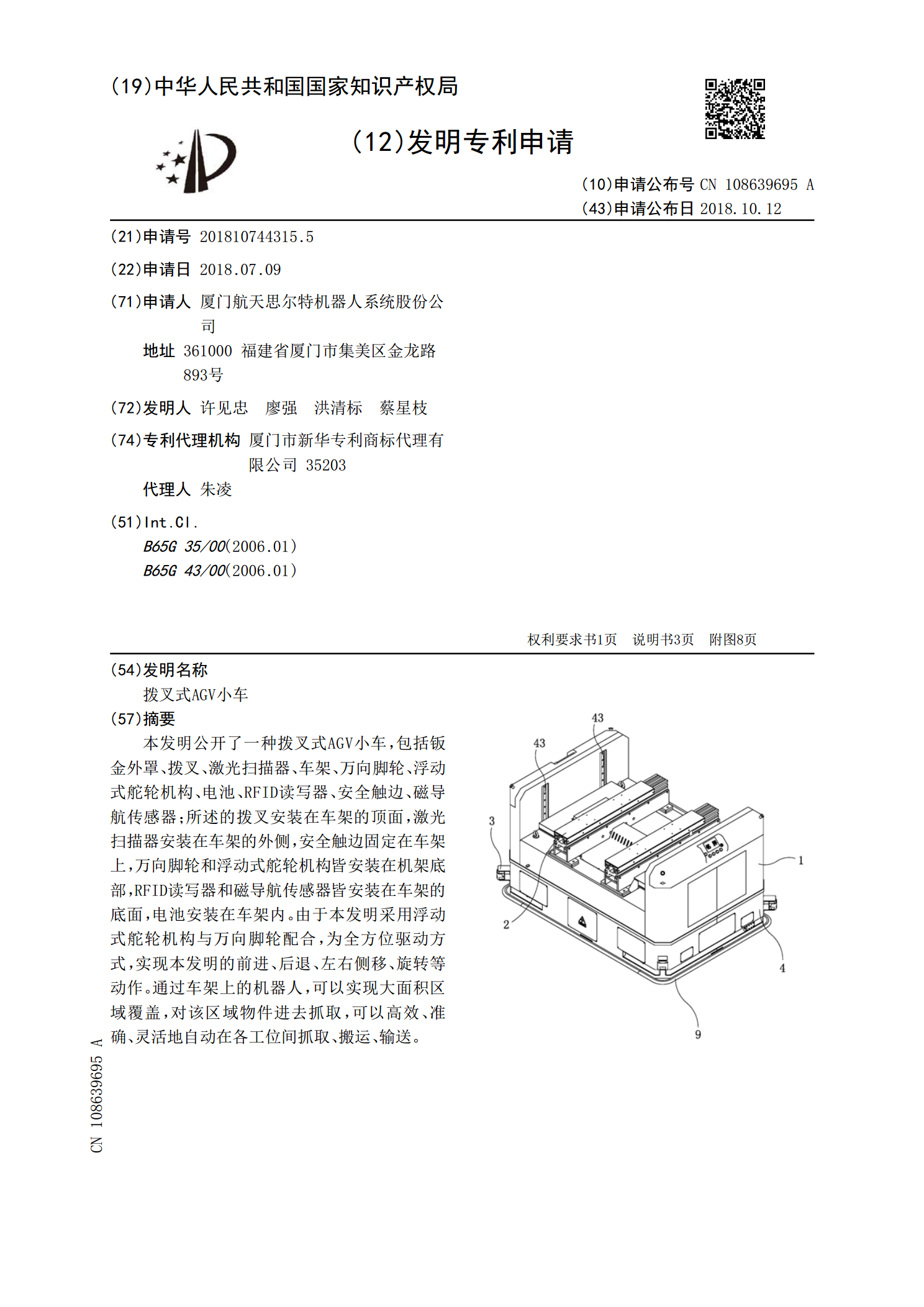
拨叉式AGV小车.pdf
本发明公开了一种拨叉式AGV小车,包括钣金外罩、拨叉、激光扫描器、车架、万向脚轮、浮动式舵轮机构、电池、RFID读写器、安全触边、磁导航传感器;所述的拨叉安装在车架的顶面,激光扫描器安装在车架的外侧,安全触边固定在车架上,万向脚轮和浮动式舵轮机构皆安装在机架底部,RFID读写器和磁导航传感器皆安装在车架的底面,电池安装在车架内。由于本发明采用浮动式舵轮机构与万向脚轮配合,为全方位驱动方式,实现本发明的前进、后退、左右侧移、旋转等动作。通过车架上的机器人,可以实现大面积区域覆盖,对该区域物件进去抓取,可以高

一种新型的手动式拨叉装置.pdf
本发明公开了一种新型的手动式拨叉装置,包括设置在拨叉安装板上的拨动机构和转动机构,拨动机构包括拨叉轴、拨杆和拨叉,拨叉轴穿过拨叉安装板上的一孔转动连接,拨叉轴的上端与拨杆的一端连接,拨叉轴的下端与拨叉连接,拨叉安装板和拨杆上分别设有挂簧轴,两挂簧轴之间连接有弹簧;转动机构包括转轴、摆杆、转轮和转轴手动结构,转轴穿过拨叉安装板上的另一孔转动连接,转轴的上端与摆杆的一端连接,转轮安装在摆杆的另一端,转轴手动结构设置在转轴的下端,拨叉安装板和转轮上分别设有挂簧轴,两挂簧轴之间连接有弹簧;摆杆的一侧设有挡板,拨杆
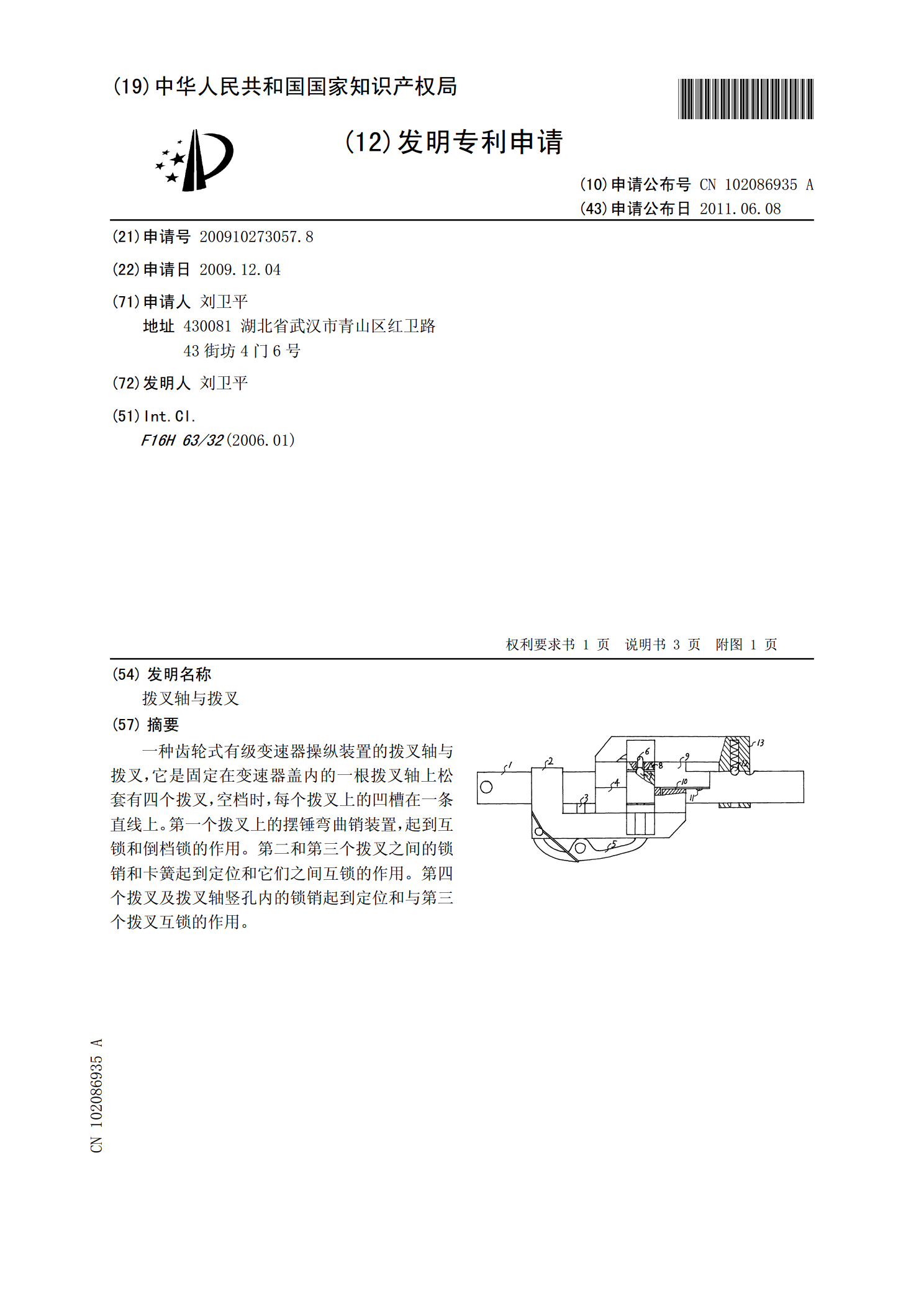
拨叉轴与拨叉.pdf
一种齿轮式有级变速器操纵装置的拨叉轴与拨叉,它是固定在变速器盖内的一根拨叉轴上松套有四个拨叉,空档时,每个拨叉上的凹槽在一条直线上。第一个拨叉上的摆锤弯曲销装置,起到互锁和倒档锁的作用。第二和第三个拨叉之间的锁销和卡簧起到定位和它们之间互锁的作用。第四个拨叉及拨叉轴竖孔内的锁销起到定位和与第三个拨叉互锁的作用。