
一种平衡车在狭窄空间的自动驻车方法和装置.pdf

雨巷****碧易

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种平衡车在狭窄空间的自动驻车方法和装置.pdf
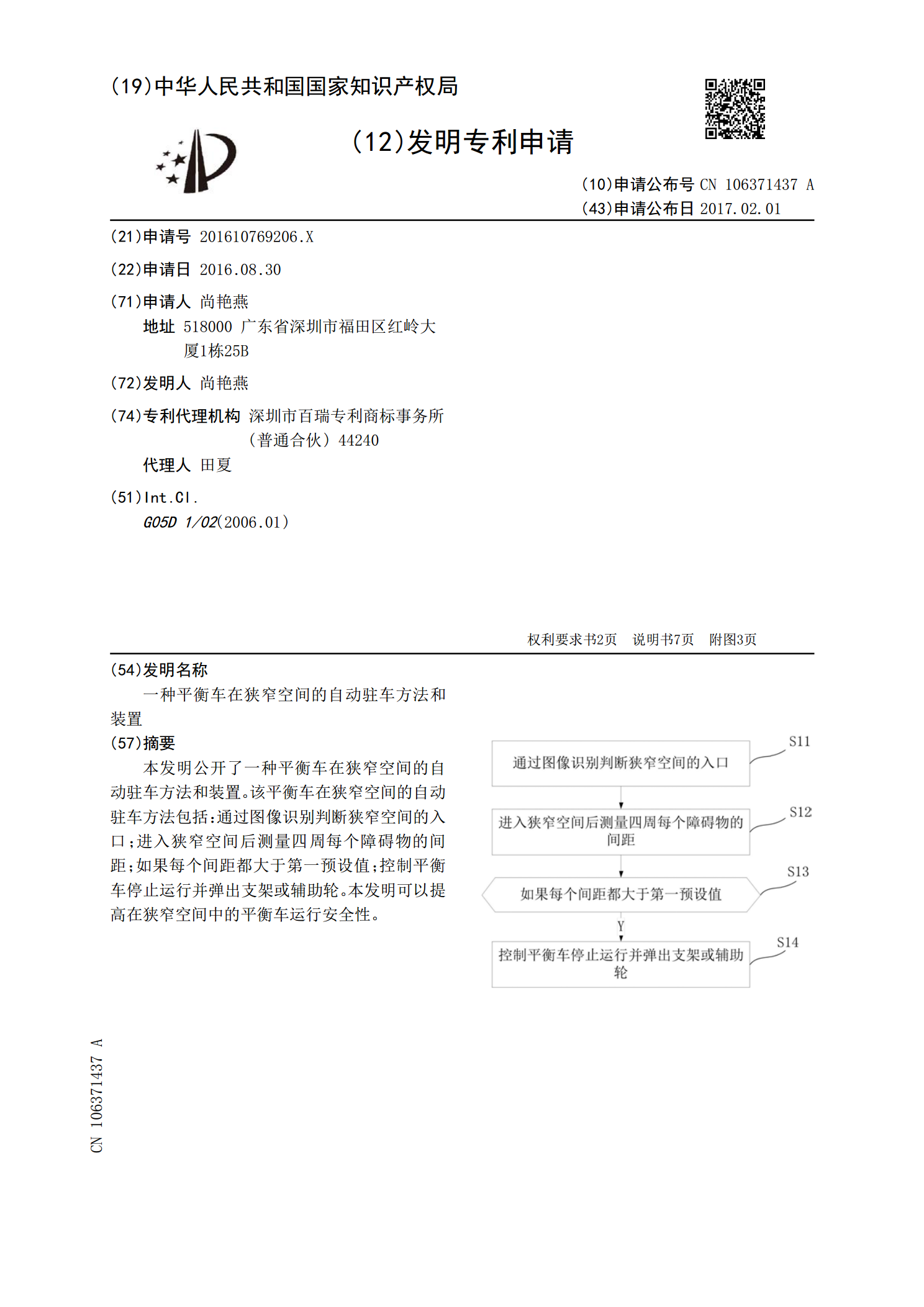
本发明公开了一种平衡车在狭窄空间的自动驻车方法和装置。该平衡车在狭窄空间的自动驻车方法包括:通过图像识别判断狭窄空间的入口;进入狭窄空间后测量四周每个障碍物的间距;如果每个间距都大于第一预设值;控制平衡车停止运行并弹出支架或辅助轮。本发明可以提高在狭窄空间中的平衡车运行安全性。
一种平衡车自动驻车的方法和装置.pdf
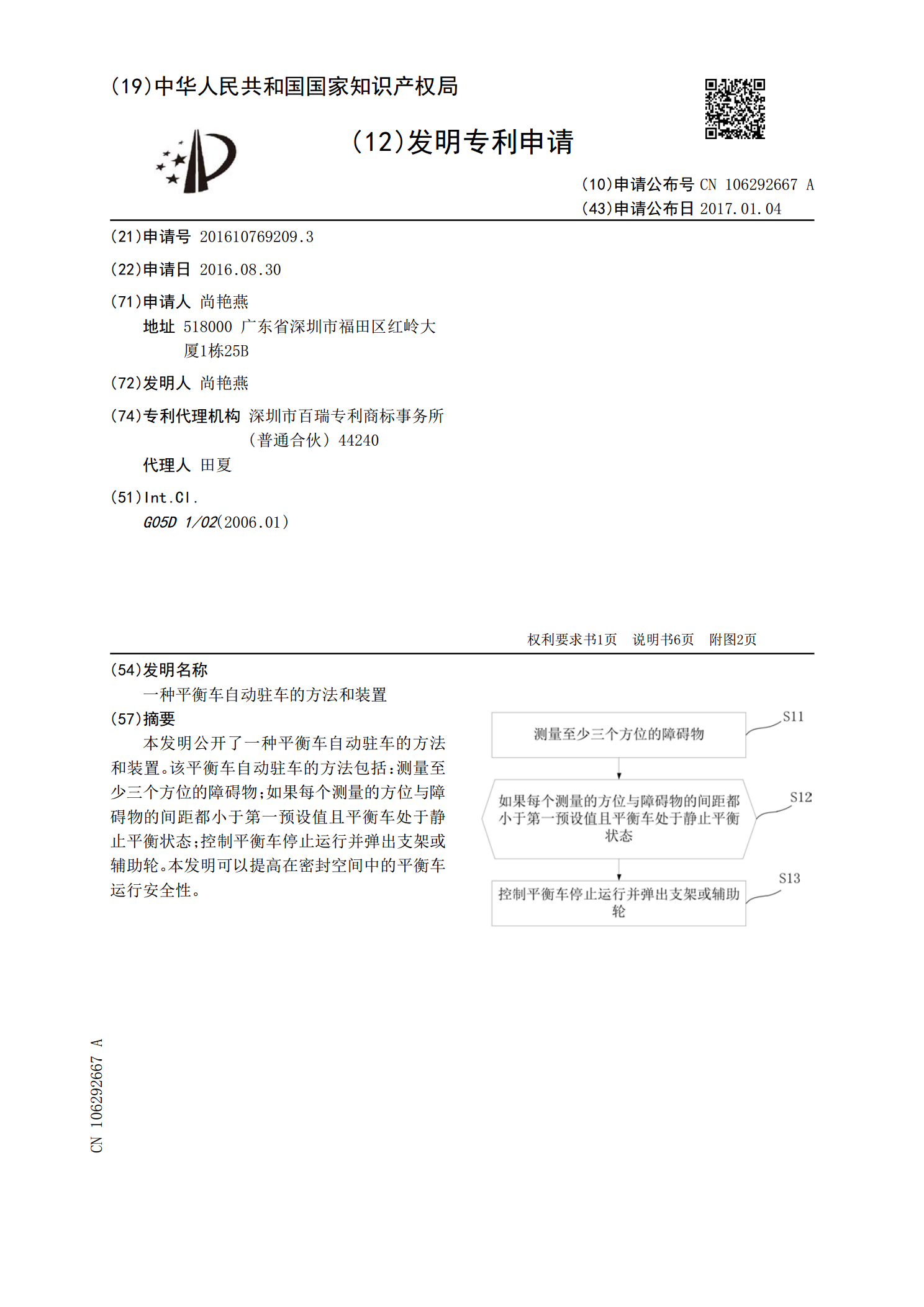
本发明公开了一种平衡车自动驻车的方法和装置。该平衡车自动驻车的方法包括:测量至少三个方位的障碍物;如果每个测量的方位与障碍物的间距都小于第一预设值且平衡车处于静止平衡状态;控制平衡车停止运行并弹出支架或辅助轮。本发明可以提高在密封空间中的平衡车运行安全性。
自动驻车控制方法和装置.pdf
本发明涉及一种自动驻车控制方法,所述方法包括:接收油门踏板位置信号;接收坡度传感器信号;接收驱动扭矩以及驱动扭矩梯度;以及至少基于油门踏板位置信号、坡度传感器信号、驱动扭矩以及驱动扭矩梯度来确定自动驻车控制过程中的制动压力释放斜率。本发明还提供了一种自动驻车控制器、汽车以及计算机存储介质。

一种自动驻车装置.pdf
本发明提供了一种自动驻车装置,属于汽车制动及驻车技术领域。它解决了现有汽车在上坡起步行车时操作烦琐而导致容易熄火的问题。本自动驻车装置,其与制动系统连接,包括车轮转速传感器、加速踏板传感器和汽车ECU,制动系统包括制动总泵,在制动总泵的缸体内设有能够锁定活塞的电控部件,该电控部件与汽车ECU连接,在车轮转速传感器检测到车轮的转速为零时输送制动信号给汽车ECU,电控部件使制动总泵内的活塞锁定,在加速踏板传感器检测到加速踏板动作时输送行车信号给汽车ECU,电控部件使制动总泵内的活塞解锁。该装置能够省去驻车的手

自动驻车装置.pdf
本发明涉及车辆驻车设备技术领域,尤其是自动驻车装置,包括固定安装在车架上的撑脚,撑脚通过其前端的自动伸缩装置与车架连接,自动伸缩装置横向设置在车架底部,自动伸缩装置通过叉形支撑架与撑脚连接,叉形支撑架和撑脚通过弯板连接件连接,弯板连接件一端与叉形支撑架转动连接,弯板连接件中部与车架后叉转动连接,弯板连接件另一端与撑脚焊接,自动伸缩装置为电动、机械传动、液压传动或是气压传动。本发明结构简单,操作方便,力量大且平稳安静,驻车方式为中支撑脚平行支撑更为稳定和安全,采用自动收缩装置代替人力,使驻车更为轻松便捷。