
一种工厂物料搬运用机器人.pdf

fa****楠吖

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种工厂物料搬运用机器人.pdf
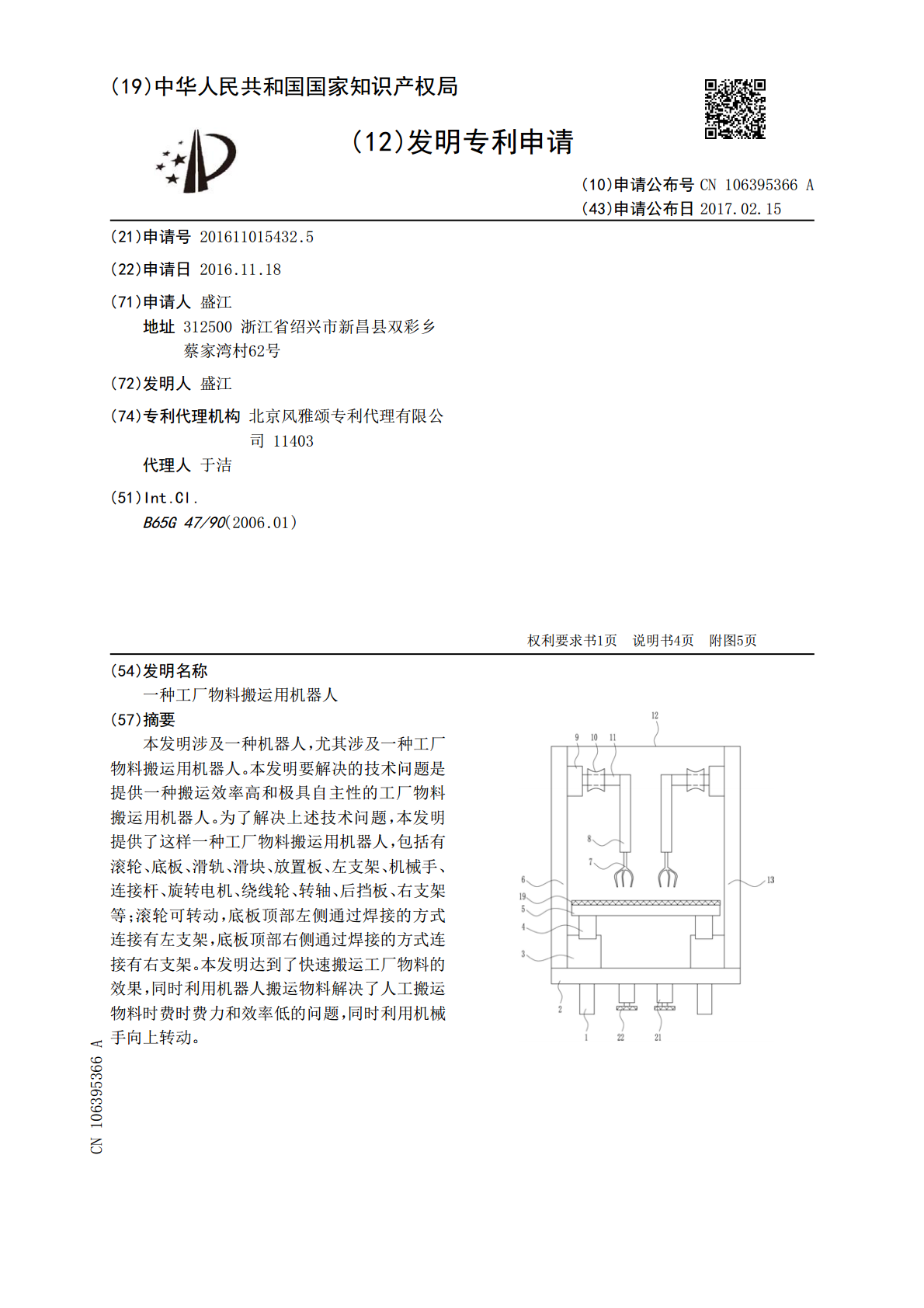
本发明涉及一种机器人,尤其涉及一种工厂物料搬运用机器人。本发明要解决的技术问题是提供一种搬运效率高和极具自主性的工厂物料搬运用机器人。为了解决上述技术问题,本发明提供了这样一种工厂物料搬运用机器人,包括有滚轮、底板、滑轨、滑块、放置板、左支架、机械手、连接杆、旋转电机、绕线轮、转轴、后挡板、右支架等;滚轮可转动,底板顶部左侧通过焊接的方式连接有左支架,底板顶部右侧通过焊接的方式连接有右支架。本发明达到了快速搬运工厂物料的效果,同时利用机器人搬运物料解决了人工搬运物料时费时费力和效率低的问题,同时利用机械手

工厂布置与物料搬.ppt
工廠布置與物料搬運工廠布置意義:良好的工廠布置,必須使人力、物料、設備能合適的配合,從原料輸入,經加工制造至成品的搬運等一切有關程序,盡量減少等待、搬運的次數與距離,使工作的流程能順利流暢為主.產品制程分析生產線布置原則线路分析:对现场布置及物料(另件、产品、设备)和作业者的实际流通路线进行分析,以达到改进现场布置和移动路线。举例如下:改善前改进及节省:.物料搬運:搬運是一純屬消耗性動作,應盡量避免.簡化搬運原則範例:工程作業工藝標準化工序分析改善的步骤,如果用PDCA的方法进行分析:1.问题的发生/发现

一种可调节搬量的物料机器人.pdf
本发明公开了一种可调节搬量的物料机器人,包括横板、立杆、第一支架、第二支架、销轴、滚轮、立柱、第一缓冲座、连杆、导向杆、限位杆、第一弹簧、第一立板、第二立板、滑轨、第二弹簧、滑板、安装座、T字架、罩壳、隔板、气压缸、外管、内管、L型架、夹持块和第二缓冲座等;本发明具有结构合理简单、生产成本低、安装方便,夹持块之间的间距可以调节,从而可以调节物料的搬运量;本发明滑板下方设置第二弹簧,同时连杆和导向杆的连接处设置第一弹簧,采用双重缓冲结构,大大提高整体的缓冲性能;本发明还设置了自由移动的抓取器,可以对搬运物体

一种搬砖机器人.pdf
本发明公布了一种搬砖机器人,包括底座、大臂驱动气缸、大臂、小臂驱动气缸、小臂、旋转气缸、夹紧装置以及调整机构;所述底座安装在履带上,所述履带上安装有主动轮,主动轮通过旋转电机驱动;所述大臂驱动气缸与大臂之间设有连接臂,连接臂顶部设有第一转轴,所述小臂驱动气缸与小臂之间设有第二转轴,所述旋转气缸固定在第二转轴上,小臂固定在旋转气缸的输出轴上,小臂与夹紧装置之间设有第三转轴,调整机构驱使第三转轴转动并调整夹紧装置的倾斜度;本机器人结构简单并且紧凑,容易操作,操作过程中能够在搬动砖块并移动位置,在夹持砖块的过程

一种自动搬砖机器人.pdf
本发明公开了一种自动搬砖机器人,包括主机体,主机体的顶部设有从动轮,从动轮与主机体通过轴承固定连接,主机体左侧中部设有主控箱,主控箱左侧设有遥控器,遥控器与主控箱信号传输连接,主控箱下部设有配重箱,配重箱是由密封箱灌沙制成,主机体下部设有电动轮,电动轮与主机体通过螺栓固定连接,主机体右侧底部设有转轴,转轴是由合金轴经车床车削制成,从动轮上部设有拉动缆绳,拉动缆绳与从动轮紧密连接,转轴右侧设有插砖板,插砖板与转轴通过螺栓固定连接,插砖板上部设有挡板,该种自动搬砖机器人,具有较高的智能化,可以减少复杂的操作,