
一种搬砖机器人.pdf

Jo****34


1/6
2/6

3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种搬砖机器人.pdf
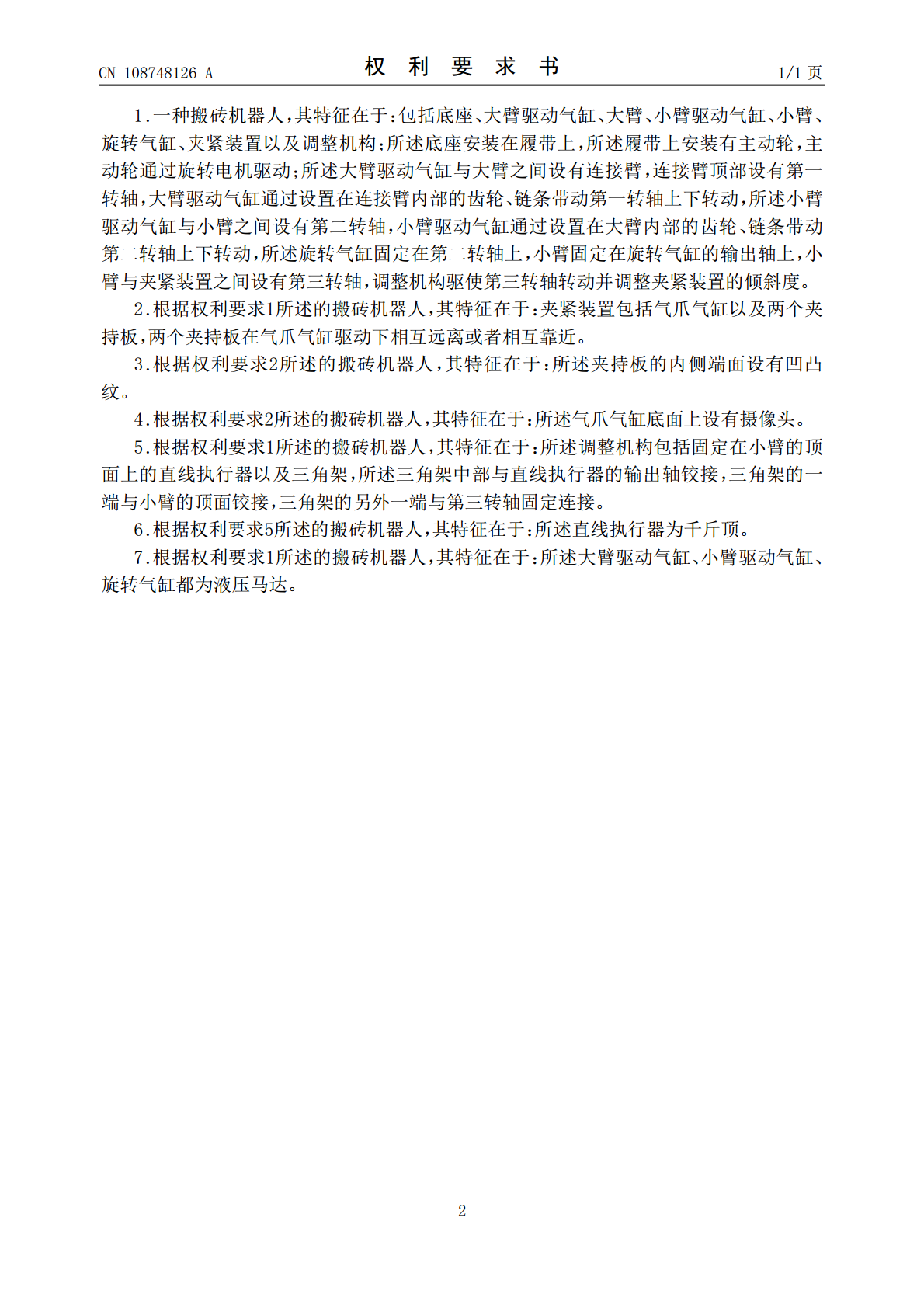
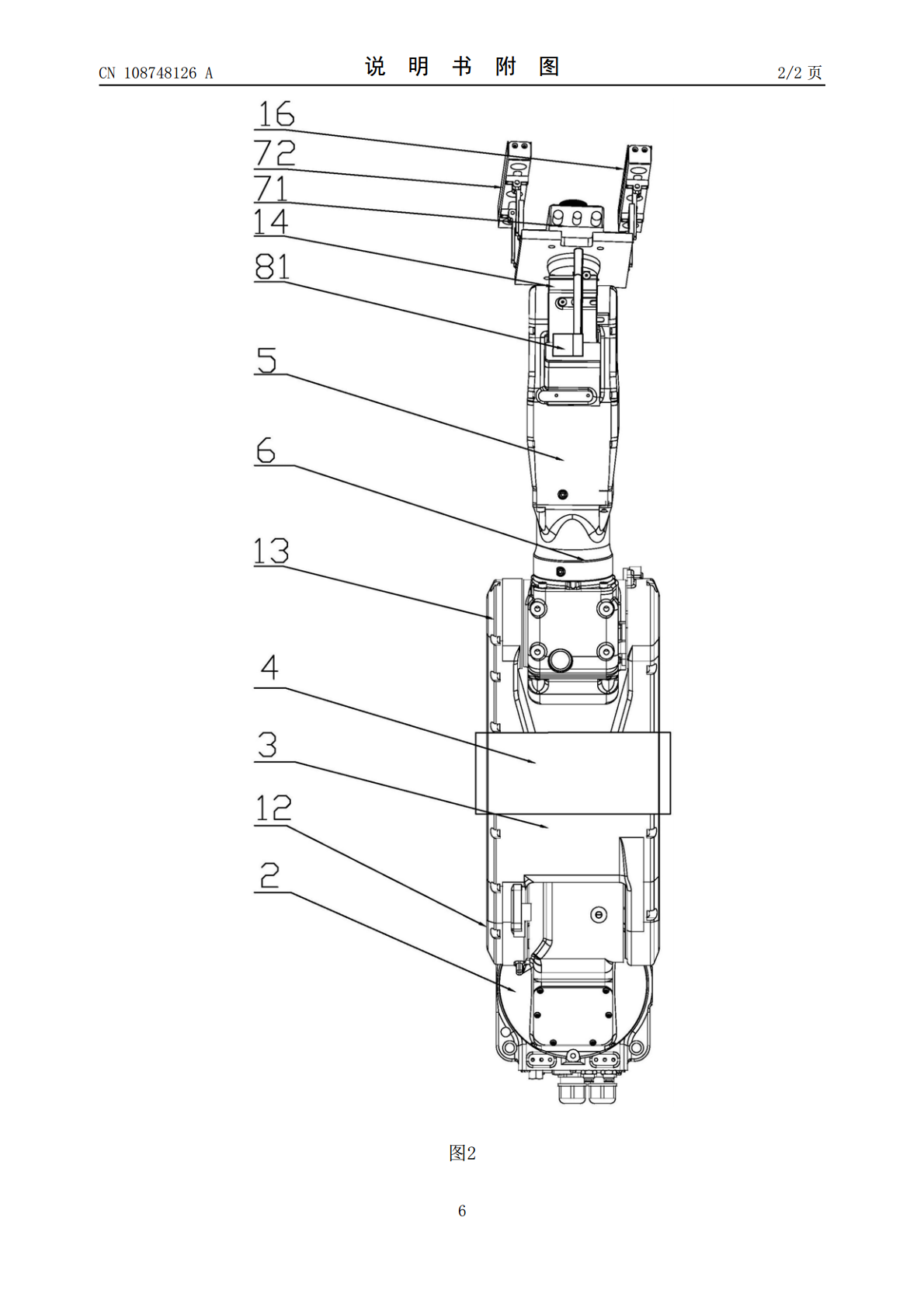
本发明公布了一种搬砖机器人,包括底座、大臂驱动气缸、大臂、小臂驱动气缸、小臂、旋转气缸、夹紧装置以及调整机构;所述底座安装在履带上,所述履带上安装有主动轮,主动轮通过旋转电机驱动;所述大臂驱动气缸与大臂之间设有连接臂,连接臂顶部设有第一转轴,所述小臂驱动气缸与小臂之间设有第二转轴,所述旋转气缸固定在第二转轴上,小臂固定在旋转气缸的输出轴上,小臂与夹紧装置之间设有第三转轴,调整机构驱使第三转轴转动并调整夹紧装置的倾斜度;本机器人结构简单并且紧凑,容易操作,操作过程中能够在搬动砖块并移动位置,在夹持砖块的过程

一种自动搬砖机器人.pdf
本发明公开了一种自动搬砖机器人,包括主机体,主机体的顶部设有从动轮,从动轮与主机体通过轴承固定连接,主机体左侧中部设有主控箱,主控箱左侧设有遥控器,遥控器与主控箱信号传输连接,主控箱下部设有配重箱,配重箱是由密封箱灌沙制成,主机体下部设有电动轮,电动轮与主机体通过螺栓固定连接,主机体右侧底部设有转轴,转轴是由合金轴经车床车削制成,从动轮上部设有拉动缆绳,拉动缆绳与从动轮紧密连接,转轴右侧设有插砖板,插砖板与转轴通过螺栓固定连接,插砖板上部设有挡板,该种自动搬砖机器人,具有较高的智能化,可以减少复杂的操作,
一种搬砖装置.pdf
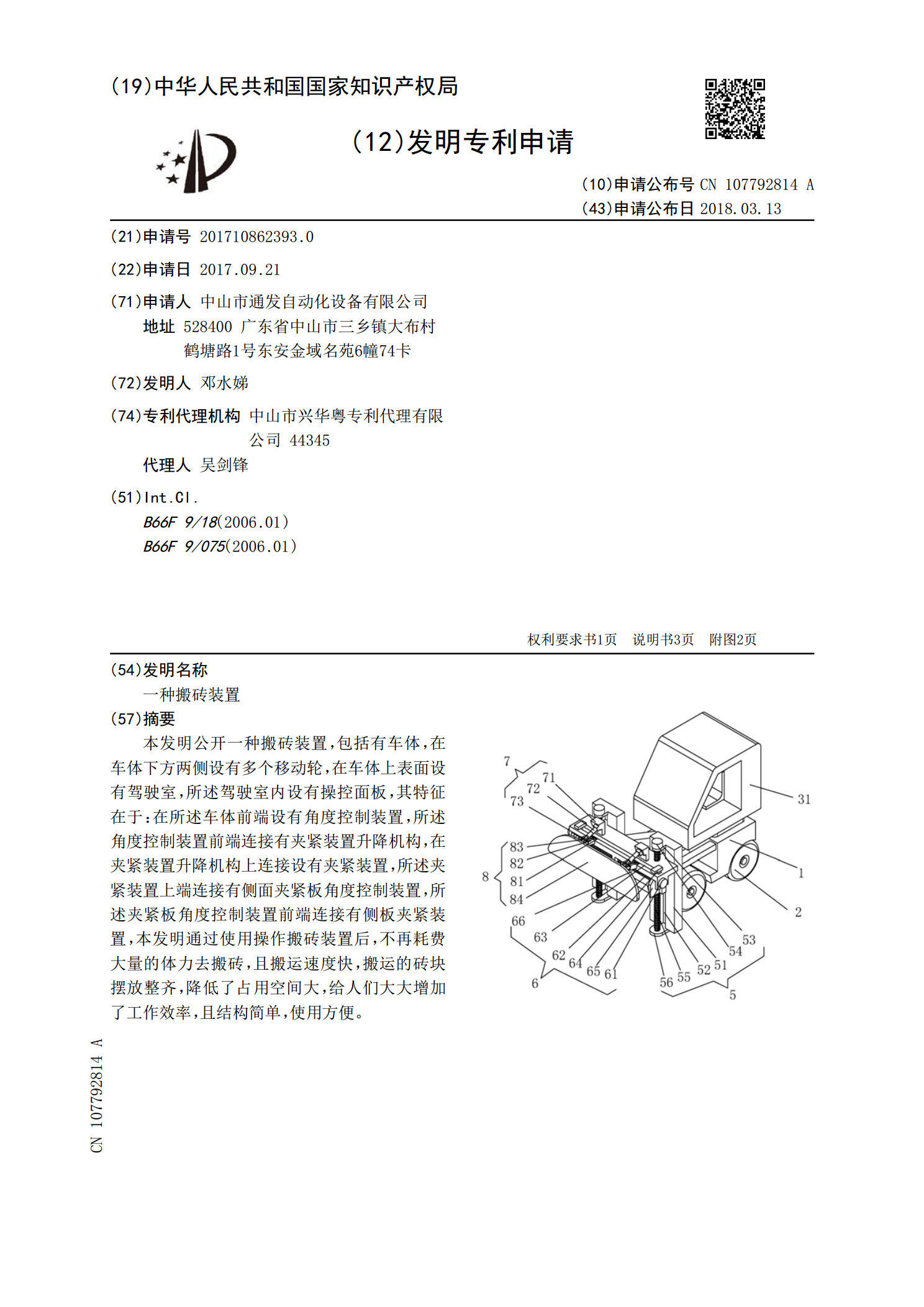
本发明公开一种搬砖装置,包括有车体,在车体下方两侧设有多个移动轮,在车体上表面设有驾驶室,所述驾驶室内设有操控面板,其特征在于:在所述车体前端设有角度控制装置,所述角度控制装置前端连接有夹紧装置升降机构,在夹紧装置升降机构上连接设有夹紧装置,所述夹紧装置上端连接有侧面夹紧板角度控制装置,所述夹紧板角度控制装置前端连接有侧板夹紧装置,本发明通过使用操作搬砖装置后,不再耗费大量的体力去搬砖,且搬运速度快,搬运的砖块摆放整齐,降低了占用空间大,给人们大大增加了工作效率,且结构简单,使用方便。
一种搬砖装置.pdf
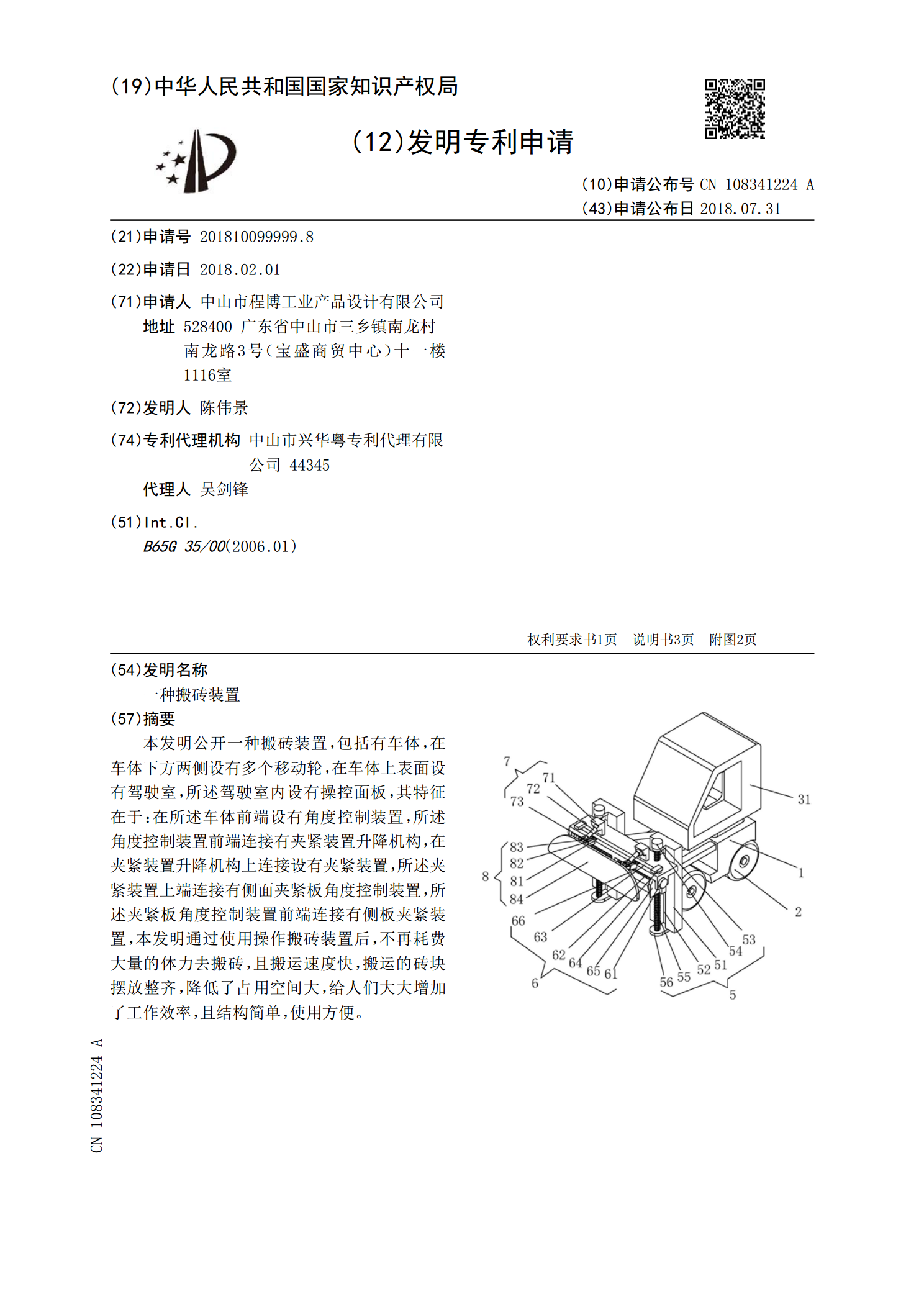
本发明公开一种搬砖装置,包括有车体,在车体下方两侧设有多个移动轮,在车体上表面设有驾驶室,所述驾驶室内设有操控面板,其特征在于:在所述车体前端设有角度控制装置,所述角度控制装置前端连接有夹紧装置升降机构,在夹紧装置升降机构上连接设有夹紧装置,所述夹紧装置上端连接有侧面夹紧板角度控制装置,所述夹紧板角度控制装置前端连接有侧板夹紧装置,本发明通过使用操作搬砖装置后,不再耗费大量的体力去搬砖,且搬运速度快,搬运的砖块摆放整齐,降低了占用空间大,给人们大大增加了工作效率,且结构简单,使用方便。

一种气动搬砖设备.pdf
本发明提供了一种气动搬砖设备,属于建筑设备技术领域。本设备包括底座、能够纵向伸缩的纵向控制臂、能够横向伸缩的横向控制臂和设置在横向控制臂外端的吸附机构,吸附机构包括驱动电机、安装座、一个主吸盘和两个辅助吸盘,安装座上具有分别连通主吸盘和辅助吸盘的主通道和辅助通道,辅助通道与主通道相通,抽真空泵的壳体与一压板固定相连,驱动电机的输出轴上连接有一叶轮,压板与主通道之间设置有在压板下压时自动控制叶轮旋转、并对主通道进行抽真空的控制机构。本发明具有结构简单、操作方便、可靠等优点。